一种多自由度遥感无人机
文献发布时间:2023-06-19 11:42:32
技术领域
本发明涉及无人机领域,更具体的说是一种多自由度遥感无人机。
背景技术
无人机的使用通常用于对复杂环境的探测,拍摄,以及较为危险的空间进行使用探测;专利号为201811410228.2公开了一种用于桥梁三维巡航检测的无人机,所述无人机包括控制器与k种定位传感器,每种定位传感器均与控制器的信号输入端连接;所述控制器内配置有多传感器融合定位程序,所述多传感器融合定位程序用于根据m种传感器对同一点的三维坐标进行坐标数据融合,1<m≤k,从而输出无人机当前巡航的空间坐标。该发明还提供一种用于桥三维巡航检测的多传感器融合定位方法,采用该发明用于桥梁三维巡航检测的无人机在巡航过程中进行实时定位,该发明解决了现有技术中由于巡航检测过程中卫星信号不稳定造成的无人机依赖GPS定位的准确性较低的技术问题。但是该设备的操作自由度较低,并不适用于在特殊环境下对无人机的操控。
发明内容
本发明的目的是提供一种多自由度遥感无人机,其有益效果为操作自由度较高,适用于在特殊环境下对无人机的操控。
本发明的目的通过以下技术方案来实现:
本发明的目的是一种多自由度遥感无人机,包括前后圆周运动驱动器、中心连接球体、左右圆周运动驱动器,对称转动座和内限位滑块,所述前后圆周运动驱动器的传动轴固定连接在中心连接球体的左端,左右圆周运动驱动器的传动轴固定连接在中心连接球体后端,中心连接球体的前端和右端分别通过转轴转动连接在两个对称转动座内,后圆周运动驱动器、左右圆周运动驱动器和两个对称转动座的外端均固定连接有内限位滑块;
所述前后圆周运动驱动器和左右圆周运动驱动器均通过电机固定座连接在延长连接杆上,前后圆周运动驱动器和左右圆周运动驱动器均通过延长连接杆连接有限位连接的内限位滑块;
所述内限位滑块固定连接在用于固定飞行螺旋器的螺旋器驱动滑板的内端,螺旋器驱动滑板的外端固定连接有用于限定滑动的外限位滑块;
所述螺旋器驱动滑板的内端通过内限位滑块限位滑动连接用于保护中心结构的四个内限位球瓣内,螺旋器驱动滑板的外端通过外限位滑块滑动连接在用于固定无人机的十字交叉球架内;
所述四个内限位球瓣之间通过用于固定限位的四个限位挡板连接,内限位滑块滑动连接在两个内限位球瓣之间;
通过前后圆周运动驱动器、中心连接球体与左右圆周运动驱动器的连接,当需要对无人机的前后方向进行调整时,通过操控无人机内部的前后圆周运动驱动器,进而通过中心连接球体使整个螺旋飞行器从前至后倾斜或者从后至前倾斜,进而确定驱动运行方向,左右圆周运动驱动器的运动驱动方式也同理;当需要对飞行器在空中180°调转方向,通过停止上方或者下方的飞行器,同时也可以通过驱动前后圆周运动驱动器或者左右圆周运动驱动器以及飞行器上的限位,进而使整个飞行器在飞行过程中在飞行空中180°调转方向,可以使左右向,也可以是前后向。
采用本发明提供的技术方案,与现有技术相比,具有如下有益效果为操作自由度较高,适用于在特殊环境下对无人机的操控;可以快速驱动无人机升起;可以在飞行空中改变整个无人机的形态,方便进入复杂空间内进行飞行操作。
附图说明
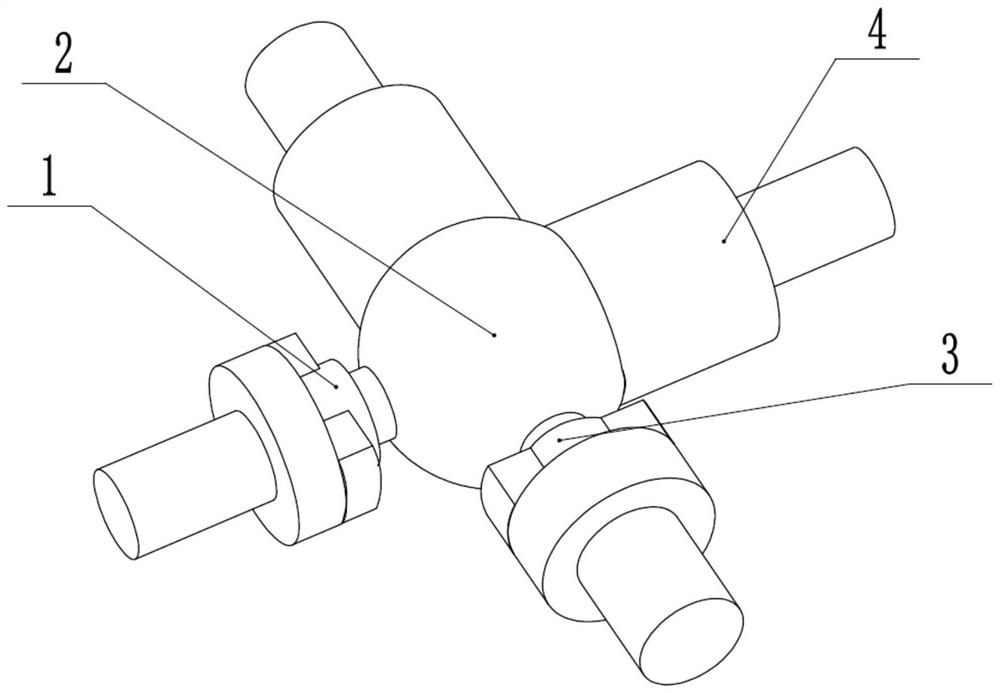
图1是本发明的核心转向驱动的结构示意图一;
图2是本发明的核心转向驱动的结构示意图二;
图3是本发明的核心转向驱动的结构示意图三;
图4是本发明的驱动延展的结构示意图一;
图5是本发明的驱动延展的结构示意图二;
图6是本发明的内限位球瓣的结构示意图;
图7是本发明的旋转螺旋器的安装固定结构示意图一;
图8是本发明的旋转螺旋器的安装固定结构示意图二;
图9是本发明的无人机机架的结构示意图;
图10是本发明的驱动阻挡切换装置的结构示意图;
图11是本发明的无人机整体的结构示意图一;
图12是本发明的无人机整体的结构示意图二。
图中;前后圆周运动驱动器1;中心连接球体2;左右圆周运动驱动器3;对称转动座4;内限位滑块5;螺旋器驱动滑板6;上螺旋器插座7;下螺旋器插座8;内限位球瓣9;限位挡板10;螺旋器固定插座11;旋转螺旋器12;位置固定器13;外限位滑块14;十字交叉球架15;下落架16;左右内滑槽17;前后内滑槽18;阻挡插板19;插板驱动器20。
具体实施方式
下面结合附图对本发明作进一步详细说明。
如这里所示的实施方式所示,
通过前后圆周运动驱动器1、中心连接球体2与左右圆周运动驱动器3的连接,当需要对无人机的前后方向进行调整时,通过操控无人机内部的前后圆周运动驱动器1,进而通过中心连接球体2使整个螺旋飞行器从前至后倾斜或者从后至前倾斜,进而确定驱动运行方向,左右圆周运动驱动器3的运动驱动方式也同理;当需要对飞行器在空中180°调转方向,通过停止上方或者下方的飞行器,同时也可以通过驱动前后圆周运动驱动器1或者左右圆周运动驱动器3以及飞行器上的限位,进而使整个飞行器在飞行过程中在飞行空中180°调转方向,可以使左右向,也可以是前后向,进而实现无人机的驱动高自由度。
结合以上实施例进一步优化:
进一步的根据图1、图2和图3所示的一种多自由度遥感无人机示例的工作过程是:
通过四个内限位滑块5用于连接固定安装螺旋飞行器的螺旋器驱动滑板6,进而通过驱动控制螺旋器驱动滑板6控制调整螺旋飞行器的角度,进而改变无人机的运动方向。
结合以上实施例进一步优化:
进一步的根据图5、图6和图7所示的一种多自由度遥感无人机示例的工作过程是:
通过螺旋器驱动滑板6的内端通过内限位滑块5连接前后圆周运动驱动器1、左右圆周运动驱动器3和对称转动座4,进而通过前后圆周运动驱动器1和左右圆周运动驱动器3的驱动使四个螺旋器驱动滑板6座相对称的圆周运动,进而驱动旋转螺旋器12进行角度调节,实现飞行中的偏移。
结合以上实施例进一步优化:
进一步的根据图4、图5、图6和图7所示的一种多自由度遥感无人机示例的工作过程是:
通过螺旋器驱动滑板6通过内限位滑块5和外限位滑块14两端的限位滑动,避免发生干涉的同时,通过在圆弧整体对称运动的特性,保障驱动过程汇总不能出现不必要的偏移,避免装置的中心连接球体2发生偏移,影响驱动重心。
结合以上实施例进一步优化:
进一步的根据图5、图6和图7所示的一种多自由度遥感无人机示例的工作过程是:
通过四个内限位球瓣9组成内球体,进而实现保护和限定前后圆周运动驱动器1、中心连接球体2和左右圆周运动驱动器3,当使用过长使四个内限位球瓣9发生相对偏移,通过手动将四个内限位球瓣9复位,同时四个内限位球瓣9通过内限位滑块5的滑动,有效限定滑动空间,与十字交叉球架15结合使用,保障驱动偏移方位。
结合以上实施例进一步优化:
进一步的根据图9所示的一种多自由度遥感无人机示例的工作过程是:
通过十字交叉球架15内的左右内滑槽17和前后内滑槽18,保障在整个偏移驱动过程中,符合使用在弧形内的特性,避免发生脱落的现象,同时通过对称驱动,保障驱动的对称性,同时通过圆周运动驱动器1、中心连接球体2和左右圆周运动驱动器3,可以结合滑动的特性,在左右圆周调节运动过程中可以发生前后圆周运动,避免出现驱动的干涉。
结合以上实施例进一步优化:
进一步的根据图6、图7和图8所示的一种多自由度遥感无人机示例的工作过程是:
通过四个螺旋器驱动滑板6,进而实现在对称驱动过程中,保持驱动的对称性,对称的两个前后两端螺旋器驱动滑板6上端插入飞行的旋转螺旋器12,使四个上端的旋转螺旋器12可以同步对称驱动,发生偏移,进行方向的偏移,实现前后的转向
结合以上实施例进一步优化:
进一步的根据图6、图7和图8所示的一种多自由度遥感无人机示例的工作过程是:
通过对称的两个左右两端螺旋器驱动滑板6下端插入飞行的旋转螺旋器12,使四个下端的旋转螺旋器12可以同步对称驱动,发生偏移,进行方向的偏移,实现左右的转向。
结合以上实施例进一步优化:
进一步的根据图6、图7和图8所示的一种多自由度遥感无人机示例的工作过程是:
旋转螺旋器12通过伺服电机驱动螺旋扇叶进行转动,通过八个旋转螺旋器12进而分成两组,通过遥感控制进行使用,在平行上升使用过程中,通过位于下端的一组四个旋转螺旋器12,便于在上升过程中快速产生气压,加速整个装置的上升;同时在达到指定高度后,通过控制两组旋转螺旋器12的转速,进行稳定;根据实际转向,进行对前后圆周运动驱动器1、中心连接球体2和左右圆周运动驱动器3的驱动,进行调节,方便偏移的操控;当要使整个无人机在飞行空中180°调转方向,可以根据实际情况可以选择一组旋转螺旋器12停止转动,对一组旋转螺旋器12进行操作,便于在飞行空中180°调转方向。
结合以上实施例进一步优化:
进一步的根据图7和图8所示的一种多自由度遥感无人机示例的工作过程是:
通过螺旋调节位置固定器13在上螺旋器插座7和下螺旋器插座8上滑动,对旋转螺旋器12进行啮合锁紧,便于对旋转螺旋器12进行固定的同时,可以根据实际情况调整旋转螺旋器12安装的高度,进而使整个两组旋转螺旋器12之间产生更为合理的距离进行调节,并方便对旋转螺旋器12进行拆卸和更换。
结合以上实施例进一步优化:
进一步的所述十字交叉球架15的上下两端分别固定连接两个下落架16。
该部分根据图9、图11和图12所示的一种多自由度遥感无人机示例的工作过程是:
通过十字交叉球架15上下两端的下落架16,方便整个无人机在使用下落过程中的支撑和下落,同时通过两个下落架16方便在无人机在空中调转角度后,也可以保障下落,避免出现只有一个下落架16发生转向后不方便下落的现象。
结合以上实施例进一步优化:
进一步的所述十字交叉球架15上均匀固定滑动插接阻挡插板19,阻挡插板19滑动插接在连接在十字交叉球架15、左右内滑槽17和前后内滑槽18内并与外限位滑块14相贴合。
该部分根据图9和图10所示的一种多自由度遥感无人机示例的工作过程是:
通过将阻挡插板19插入十字交叉球架15内,在前后圆周运动驱动器1和左右圆周运动驱动器3驱动转向后,通过外限位滑块14对插入的阻挡插板19进行驱动,进而使整个十字交叉球架15发生偏移,在应对复杂空间的飞行中,可以转变无人机的形态和样式,方便在复杂空间进行使用;当阻挡插板19不插入的时候,依然实现偏移的效果。
结合以上实施例进一步优化:
进一步的所述阻挡插板19通过啮合传动连接用于电控驱动的插板驱动器20,插板驱动器20固定连接在十字交叉球架15上。
该部分根据图9和图10所示的一种多自由度遥感无人机示例的工作过程是:
通过插板驱动器20的驱动控制,使整个阻挡插板19都插入或者取出,插板驱动器20通过整体的程序控制,进而通过变频电机驱动转动,方便整体操纵控对阻挡插板19的插入和取出,进而实现对无人机使用形态的快速切换。
结合以上实施例进一步优化:
进一步的所述阻挡插板19对称设置在十字交叉球架15上,对称的两个外限位滑块14的上端和下端分别贴合阻挡插板19。
该部分根据图6、图11和图12所示的一种多自由度遥感无人机示例的工作过程是:
通过四个内限位球瓣9上的四个限位挡板10以及四个阻挡插板19的插入,在前后圆周运动驱动器1和左右圆周运动驱动器3驱动转向时,起到对称驱动的效果的同时,同步驱动使整个十字交叉球架15两个下落架16发生偏移,避免造成四个内限位球瓣9发生角度变化的情况,保障整个无人机的使用和驱动。
- 一种多自由度遥感无人机
- 一种多自由度的遥感无人机