一种腰腹运动辅助方法及装置
文献发布时间:2023-06-19 11:44:10
技术领域
本发明涉及医疗康复运动领域,尤其涉及一种腰腹运动辅助方法及装置。
背景技术
现有的腰腹运动机械大多数为坐椅型,这类机械适用于有行动能力的人员。对于长期卧床又需要腰腹锻炼或者腰腹力量恢复的患者来说,使用起来不方便也不安全。因此设计一种适用于卧床患者使用的腰腹运动康复机械非常有必要。
发明内容
本发明要解决的技术问题是克服现有技术的不足,提供一种稳定可靠、用户体验感好的腰腹运动辅助方法及装置。
为解决上述技术问题,本发明采用以下技术方案:
一种腰腹运动辅助方法,包括以下步骤:
S1、用户平躺;
S2、输入腰腹运动指令;
S3、背板自动向上翻转,同时,脚踏板自动向上平移,带动小腿床板向上翻转,实现用户起背和抬腿动作,达到腰腹运动的作用;
S4、停止输入指令,背板、小腿床板和脚踏板回位。
一种腰腹运动辅助装置,包括床板、床板支架、床架、起背驱动机构和抬腿驱动机构,所述床板通过床板支架安装在床架上,所述床板包括背板、大腿床板、小腿床板和脚踏板,所述大腿床板固定床板支架上,所述背板与大腿床板铰接,所述起背驱动机构设于背板的下方,用于驱动背板相对大腿床板向上翻转,所述小腿床板与大腿床板铰接且二者具有铰接点P,所述脚踏板与小腿床板铰接且二者具有铰接点Q,所述抬腿驱动机构包括抬腿导轨、过渡连杆、L形抬腿连杆和滑动驱动,所述抬腿导轨安装于床板支架的背面,所述滑动驱动用于驱动抬腿导轨的抬腿滑块移动,所述L形抬腿连杆铰接于床板支架上且二者具有铰接点M,所述L形抬腿连杆具有水平连杆部和竖直连杆部,所述铰接点M设于水平连杆部和竖直连杆部的结合处,所述过渡连杆一端与抬腿滑块铰接,另一端与竖直连杆部铰接,所述脚踏板的背面固设有支撑竖直板,所述水平连杆部与支撑竖直板铰接且二者具有铰接点N,所述铰接点P与铰接点M在同一竖直线上,所述铰接点Q与铰接点M在同一竖直线上,线PM与线QN长度相等。
作为上述技术方案的进一步改进:
所述滑动驱动包括抬腿丝杠、抬腿电机和抬腿丝杠连杆,所述抬腿丝杠安装在床板支架的背面,所述抬腿电机与抬腿丝杠连接,所述抬腿丝杠连杆一端与抬腿丝杠的抬腿丝杠螺母连接,另一端与抬腿滑块连接。
所述床板支架背面设有两个连接竖板,所述抬腿丝杠两端穿设在两个连接竖板上,且抬腿丝杠与连接竖板之间设有轴承座。
所述抬腿滑块上设有耳板,所述抬腿丝杠连杆与所述耳板连接,所述过渡连杆铰接于所述耳板上。
所述抬腿导轨、过渡连杆、L形抬腿连杆和支撑竖直板均设置两个。
所述起背驱动机构包括起背丝杠、起背电机、起背丝杠连杆、起背连杆和起背导轨,所述起背丝杠固定在床板支架的背面,所述起背电机与起背丝杠连接,所述起背导轨设于背板的背面,所述起背连杆一端与床板支架铰接,另一端可移动的设于起背导轨内,所述起背丝杠连杆一端与起背连杆铰接,另一端与起背丝杠螺母连接。
设所述起背丝杠连杆与起背连杆具有铰接点E,起背丝杠连杆与起背丝杠螺母连接的一端为连接点F,起背连杆与床板支架铰接的一端为铰接点O,则P、Q和O点之间的连线构成一个三角形。
所述起背导轨内设有滚轮,所述起背连杆与所述滚轮连接。
所述起背连杆和起背导轨均设置两个,所述起背丝杠设于两个起背导轨之间。
与现有技术相比,本发明的优点在于:
(1)本发明的腰腹运动辅助的方法,将抬腿运动和起背运动合成腰腹运动,实现用户(康复者或者老年人)躺在床上即可实现腰腹的运动。
(2)本发明的腰腹运动辅助装置,在完成腰腹运动时,抬腿机构不仅要稳定的支撑住一小腿床板与大腿床板和整个下肢的重量,而且还要能够在任意位置安全可靠的停止,以满足用户对不同抬角度的需求,抬腿的时候脚踏板始终保持水平,提供给用户更好的使用体验,舒适度高,所设计的腰腹运动机械结构,完美与床融为一体,既可以睡觉休息使用,又可以辅助康复。
附图说明
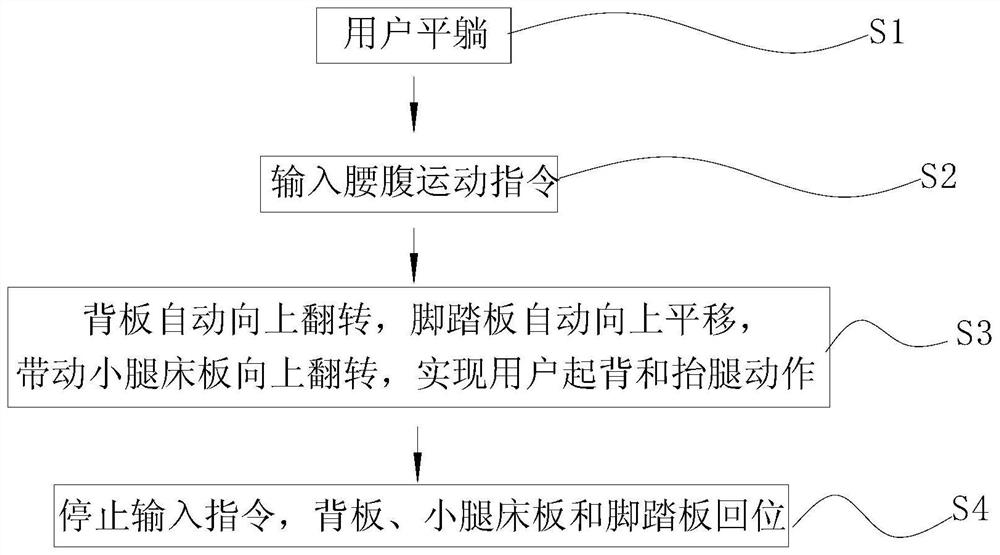
图1是本发明实施例1的腰腹运动辅助的方法的流程示意图。
图2是本发明实施例2的腰腹运动辅助装置的动作过程状态示意图。
图3是本发明实施例2的腰腹运动辅助装置主视图。
图4是本发明实施例2中抬腿和起背动作过程示意图。
图5是本发明实施例2中起背驱动机构的结构示意图。
图6是本发明实施例2中抬腿驱动机构的结构示意图。
图7是本发明实施例2中抬腿连接座的结构示意图。
图8是本发明实施例2中抬腿丝杠连杆的结构示意图。
图中各标号表示:
1、床板;11、背板;12、大腿床板;13、小腿床板;14、脚踏板;2、床板支架;21、连接竖板;3、床架;4、起背驱动机构;41、起背丝杠;411、起背丝杠螺母;42、起背电机;43、起背丝杠连杆;44、起背连杆;45、起背导轨;451、滚轮;5、抬腿驱动机构;51、抬腿导轨;511、抬腿滑块;512、耳板;52、过渡连杆;53、L形抬腿连杆;531、水平连杆部;532、竖直连杆部;54、抬腿丝杠;541、抬腿丝杠螺母;55、抬腿电机;56、抬腿丝杠连杆;561、连杆分板;562、加强筋;57、抬腿连接座;571、第一U形槽571;6、支撑竖直板。
具体实施方式
以下结合说明书附图和具体实施例对本发明作进一步详细说明。
实施例1
如图1所示,本实施例的腰腹运动辅助的方法,包括以下步骤:
S1、用户平躺;
S2、输入腰腹运动指令;
S3、背板自动向上翻转,同时,脚踏板14自动向上平移,带动小腿床板13向上翻转,实现用户起背和抬腿动作,达到腰腹运动的作用;
S4、停止输入指令,背板11、小腿床板13和脚踏板14回位。
通过上述的方法,将抬腿运动和起背运动合成腰腹运动,实现用户(康复者或者老年人)躺在床上即可实现腰腹的运动。
实施例2
如图2至图8所示,本实施例的腰腹运动辅助装置,包括床板1、床板支架2、床架3、起背驱动机构4和抬腿驱动机构5,床板1通过床板支架2安装在床架3上,床板1包括背板11、大腿床板12、小腿床板13和脚踏板14,大腿床板12固定床板支架2上,背板11与大腿床板12铰接,起背驱动机构4设于背板11的下方,用于驱动背板11相对大腿床板12向上翻转。小腿床板13与大腿床板12铰接且二者具有铰接点P,脚踏板14与小腿床板13铰接且二者具有铰接点Q,抬腿驱动机构5包括抬腿导轨51、过渡连杆52、L形抬腿连杆53和滑动驱动,抬腿导轨51安装于床板支架2的背面,滑动驱动用于驱动抬腿导轨51的抬腿滑块511移动,L形抬腿连杆53铰接于床板支架2上且二者具有铰接点M,L形抬腿连杆53具有水平连杆部531和竖直连杆部532,铰接点M设于水平连杆部531和竖直连杆部532的结合处,过渡连杆52一端与抬腿滑块511铰接,另一端与竖直连杆部532铰接,脚踏板14的背面固设有支撑竖直板6,水平连杆部531与支撑竖直板6铰接且二者具有铰接点N,铰接点P与铰接点M在同一竖直线上,铰接点Q与铰接点M在同一竖直线上,线PM与线QN长度相等,以使PMQN四点连线始终为平行四边形。
正常情况下,脚踏板14、小腿床板13与大腿床板12和背板11处于水平位置。
当需要腰腹运动时,起背驱动机构4驱动背板11相对大腿床板12向上翻转,实现用户起背,
同时,启动滑动驱动,驱动抬腿滑块511沿抬腿导轨51在水平面内向左(图3中的向左)移动,抬腿滑块511推动过渡连杆52向左移动,过渡连杆52推动L形抬腿连杆53绕铰接点M(顺时针)旋转,竖直连杆部532、水平连杆部531向上移动带动支撑竖直板6上移,进而带动脚踏板14向上平移,脚踏板14带动小腿床板13相对大腿床板12向上翻转,完成抬腿的动作,如图1和图2所示。在抬腿动作过程中,铰接点P、铰接点M、铰接点N、铰接点Q之间的连线始终是一个平行四边形,从而保持脚踏板14始终处于水平位置。起背动作和抬腿动作进而合成了腰腹运动。
该腰腹运动辅助装置,在完成腰腹运动时,抬腿机构不仅要稳定的支撑住一小腿床板13与大腿床板12和整个下肢的重量,而且还要能够在任意位置安全可靠的停止,以满足用户对不同抬角度的需求。抬腿的时候脚踏板14始终保持水平,提供给用户更好的使用体验,舒适度高。所设计的腰腹运动机械结构,完美与床融为一体。既可以睡觉休息使用,又可以辅助康复。
本实施例中,滑动驱动包括抬腿丝杠54、抬腿电机55和抬腿丝杠连杆56,抬腿丝杠54安装在床板支架2的背面,抬腿电机55与抬腿丝杠54连接,抬腿丝杠连杆56一端与抬腿丝杠54的抬腿丝杠螺母541连接,另一端与抬腿滑块511连接。启动抬腿电机55,抬腿丝杠4旋转,抬腿丝杠螺母541在水平面内向左(图3)移动,带动抬腿丝杠连杆56向左移动,沿着抬腿导轨51向右移动,抬腿丝杠连杆56带着抬腿滑块511在抬腿导轨51内向左移动,进而驱动抬腿。抬腿丝杠54选择带自锁功能的丝杠,可以实现任意位置自锁。用户可以通过遥控器控制抬腿电机55,自行调整曲腿或者抬腿角度,能够满足不同用户的使用需求。
本实施例中,床板支架2背面设有两个连接竖板21,抬腿丝杠54两端穿设在两个连接竖板21上,且抬腿丝杠54与连接竖板21之间设有轴承座,保证抬腿丝杠54只转不移动。
本实施例中,抬腿滑块511上设有耳板512,抬腿丝杠连杆56与耳板512连接,过渡连杆52铰接于耳板512上。支撑竖直板6为直角三角形板,直角三角形板的水平部分与脚踏板14固定连接,以便给予脚踏板14支撑。床板支架2靠近小腿床板13一端设有抬腿连接座57,抬腿连接座57设有第一U形槽571,竖直连杆部532通过销轴铰接于第一U形槽571内。
本实施例中,抬腿导轨51、过渡连杆52、L形抬腿连杆53和支撑竖直板6均设置两个,用于提高屈腿动作的稳定性。抬腿丝杠连杆56包括两个连杆分板561,连杆分板561一端与对应的抬腿导轨51的抬腿滑块511连接,另一端与抬腿丝杠螺母541固定连接,且连杆分板561靠抬腿丝杠螺母541的这一端向内折弯,连杆分板561还包括加强筋562。
本实施例中,起背驱动机构4包括起背丝杠41、起背电机42、起背丝杠连杆43、起背连杆44和起背导轨45,起背丝杠41固定在床板支架2的背面,起背电机42与起背丝杠41连接,起背导轨45设于背板11的背面,起背连杆44一端与床板支架2铰接,另一端可移动的设于起背导轨45内,起背丝杠连杆43一端与起背连杆44铰接,另一端与起背丝杠螺母411连接。起背丝杠41也通过两个连接竖板21安装在床板支架2的背面。
通过在床架3上设置操作按钮或者设置遥控器。启动操作按钮即可开启起背电机42,从而开启起背动作,起背电机42驱动起背丝杠41转动,起背丝杠41被限定只转不移动,起背丝杠41上的起背丝杠螺母411移动(图3中的向左移动),起背丝杠螺母411带动起背丝杠连杆43移动,起背丝杠连杆43推动起背连杆44沿起背导轨45向上转动,从而推动背板11相对大腿床板12向上翻转,实现起背动作。起背丝杠41选择带自锁功能的丝杠,相比与液压驱动,丝杠驱动连杆机构更结构简单,运动可靠,方便维修,成本低,起背驱动机构空间占有率小,起背角度范围大,能在任意位置自锁,大大提高了操作的安全性。
本实施例中,设起背丝杠连杆43与起背连杆44具有铰接点E,起背丝杠连杆43与起背丝杠螺母411连接的一端为连接点F,起背连杆44与床板支架2铰接的一端为铰接点O,则E、F和O点之间的连线构成一个三角形。即在背板11相向翻转的过程中,起背丝杠连杆43、起背连杆44、起背丝杠41三者始终构成一个稳定的三角形,使起背动作更加安全可靠。
本实施例中,起背导轨45内设有滚轮451,起背连杆44与滚轮451连接。通过滚轮451在起背导轨45内滚动,实现起背连杆44在起背导轨45内移动的同时推动背板11翻转,避免起背连杆44与背板11的之间直接滑动摩擦。
本实施例中,起背连杆44和起背导轨45均设置两个,起背丝杠41设于两个起背导轨45之间,提高起背时的稳定性。
虽然本发明已以较佳实施例揭露如上,然而并非用以限定本发明。任何熟悉本领域的技术人员,在不脱离本发明技术方案范围的情况下,都可利用上述揭示的技术内容对本发明技术方案做出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本发明技术方案的内容,依据本发明技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均应落在本发明技术方案保护的范围内。
- 一种腰腹运动辅助方法及装置
- 一种用于体育运动的腰腹力量训练器