一种智能网联车用地图拓扑连线生成方法
文献发布时间:2023-06-19 11:44:10
技术领域
本发明涉及地图图像处理技术领域,特别涉及一种智能网联车用地图拓扑连线生成方法。
背景技术
现在社会中,导航的出现极大便利了人们的出行,同时自动驾驶车辆的研发,对地图的精度提出更高的要求,例如高精度地图。高精度地图指精度达厘米级,能够提供大尺度道路信息的地图,是支撑自动驾驶系统的关键技术之一。
高精度地图提供的道路信息包括标线、标识、标牌,拓扑关系以及限制属性等。道路拓扑关系是高精度地图中最重要的信息,在拓扑关系构建时,使用采集的道路标线来指示道路之间的连接关系。
但是存在大量无车道区,例如道路路口、收费站、临时无车道道路等,一般使用虚拟连接线来表示无车道区的道路连接关系。当前,普遍的处理方式是人工绘制,效率比较低且不美观;另外,如果采用众包汽车行驶轨迹大数据来拟合虚拟连接线,需要汽车行驶轨迹精度非常高,但依靠众包汽车无法提供高精度的汽车行驶轨迹。因此,对于目前不能高效、精确、美观的生成路网虚拟连接线的问题,尚未提出有效的解决方案。
相关名词解释:
无车道区:用于表示无车道线或未刷车道线区域,例如道路路口、收费站、临时无车道道路等。
车道参考线:指用于表示车道的矢量线段,通常以车道中心线表示。
车道节点:包括车道参考线的起始节点和终止节点。
发明内容
针对现有技术中地图路网虚拟连接线生成精度较低的问题,本发明提出一种智能网联车用地图拓扑连线生成方法,
为了实现上述目的,本发明提供以下技术方案:
一种智能网联车用地图拓扑连线生成方法,具体包括以下步骤:
S1:根据外业采集道路数据,并经内业数据处理获得道路信息,从而获取无车道区道路拓扑关系;
S2:根据所述道路拓扑关系、驶出车道结束节点坐标和对应车道起始节点坐标,计算驶出车道和对应车道的映射距离,并取最小映射距离对应的车道为驶入车道,从而建立车道映射关系;
S3:根据车道映射关系生成虚拟连接线。
优选的,所述外业包括但不限于移动测量系统、测量仪器和无人机。
优选的,所述道路信息包括车道数量、车道行驶方向、车道标线、车道节点、车道指示标志和车道参考线。
优选的,所述无车道区道路拓扑关系为车道上下游关系,包括直行车道与直行车道连接、右转车道与右侧直行车道连接以及左转车道与左侧直行车道连接。
优选的,所述S2中,驶出车道结束节点坐标为p1(x1,y1,z1),对应车道起始节点坐标为p2(x2,y2,z2),则映射距离的计算公式为:
优选的,所述驶出车道结束节点坐标和对应车道起始节点坐标采用高斯投影坐标。
优选的,所述S3包括以下步骤:
S3-1:驶出车道结束节点为p1(x1,y1,z1),驶入车道起始节点为p2(x2,y2,z2),则映射距离为:
S3-2:在驶出车道的车道参考线的延长线上取一点M可得到驶出方向矢量MP1,使得|MP1|=k×|P2P1|,同时在驶入车道的车道参考线的反向延长线上取一点N可得到驶入方向矢量NP2,使得|NP2|=k×|P2P1|,其中k表示比例因子;
S3-3:根据驶出方向矢量MP1和驶入方向矢量NP2生成虚拟连接线。
优选的,采用bezier曲线生成虚拟连接线,虚拟连接线的起点为P1,第一控制点为M,第二控制点为N,终点为P2;第一控制点为M和第二控制点为N为控制曲线的弯曲走向。
本发明还提供一种智能网联车用地图拓扑连线生成系统,包括数据采集装置、道路拓扑生成模块、车道映射生成模块和连线生成模块。
数据采集装置,用于采集道路信息,道路信息包括车道数量、车道行驶方向、车道标线、车道节点、车道指示标志、车道参考线;
道路拓扑生成模块,用于根据道路信息生成车道之间的拓扑关系;
车道映射生成模块,用于根据车道之间的拓扑关系生成驶出车道和驶入车道的映射关系。
连线生成模块,用于根据驶出车道和驶入车道的映射关系生成虚拟连接线。
综上所述,由于采用了上述技术方案,与现有技术相比,本发明至少具有以下有益效果:
利用车道参考线、车道节点求取曲线控制点,提高虚拟连接线的绘制效率和美观性,进而提高高精度地图道路拓扑构建效率。
在高精度地图道路信息获取的基础上进行虚拟连接线的生产,提高虚拟连接线的正确性和精度。
附图说明:
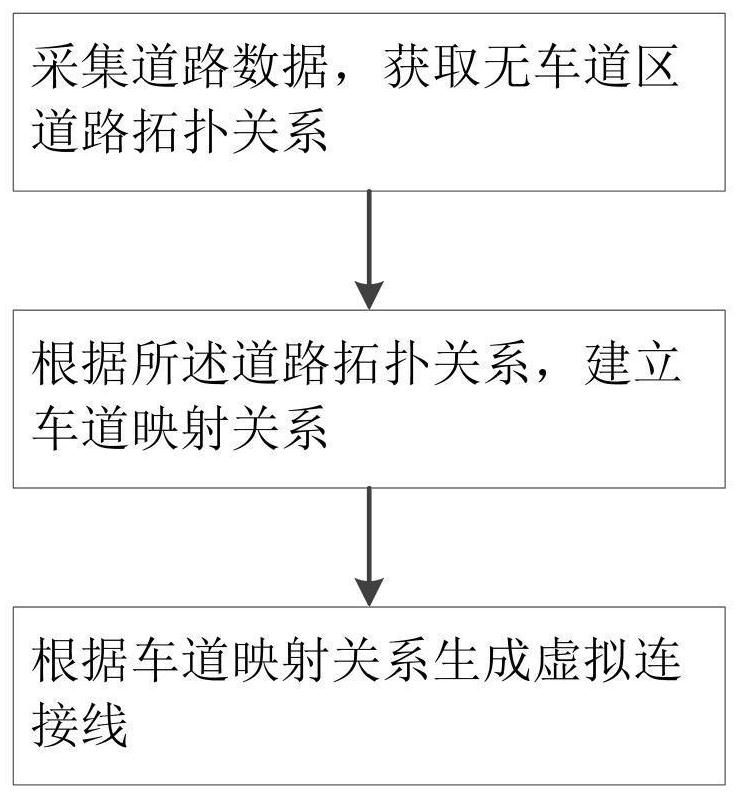
图1为根据本发明示例性实施例的一种智能网联车用地图拓扑连线生成方法示意图。
图2为根据本发明示例性实施例的无车道区道路拓扑示意图。
图3为根据本发明示例性实施例的无车道区道路虚拟连接线示意图。
具体实施方式
下面结合实施例及具体实施方式对本发明作进一步的详细描述。但不应将此理解为本发明上述主题的范围仅限于以下的实施例,凡基于本发明内容所实现的技术均属于本发明的范围。
在本发明的描述中,需要理解的是,术语“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
如图1所示,本发明提供一种智能网联车用地图拓扑连线生成方法,具体包括以下步骤:
S1:采集道路数据,获取无车道区道路拓扑关系。
本实施例中,首先根据外业采集道路数据,并经内业处理获得道路信息,道路信息包括车道数量、车道行驶方向、车道标线、车道节点、车道指示标志、车道参考线。
其中,外业采集方式包括但不限于使用移动测量系统进行数据采集、使用测量仪器进行采集、使用无人机进行采集等。
然后根据已采集的道路信息获取无车道区道路拓扑关系,无车道区道路拓扑关系指车道之间的上下游关系。
例如,采集道路周边激光点云和影像数据,经过内业处理获取成果点云与成果影像数据。然后使用提取工具按照车行方向提取车道标线、车道参考线、车道节点、停止线、车道指示标识等。其中车道标线提取标线左右边沿线;车道参考线提取车道中心线;车道节点为车道参考线起始节点和结束节点;车道指示标识指示车道行进方向,如左转、右转、掉头、直行、左转直行、右转直行等。再根据车道位置及指示标识构建车道上下游关系,如直行车道与直行车道连接、右转车道与右侧直行车道连接、左转车道与左侧直行车道连接以及掉头车道与同侧反向车道连接,从而实现无车道区道路拓扑关系的构建。
S2:根据所述道路拓扑关系,建立车道映射关系。
在建立车道映射关系时,应充分考虑安全行驶规则,计算驶出车道和对应车道的映射距离,并取最小距离对应的车道为驶入车道,即驶出车道结束节点和驶入车道起始节点的距离最小。
本实施例中,高精度地图数据是绝对地理位置,以选定的地理坐标系为参照,国内地理坐标系为CGCS2000,通过投影建立车道节点的空间直角坐标系,通常为高斯投影。驶出车道结束节点为p1(x1,y1,z1),驶入车道起始节点为p2(x2,y2,z2),则映射距离:
如图2所示,虚线框为无车道区,第一道路区域包括车道L1、L2、L3、L4和L5,L1和L2为驶出车道,L3、L4和L5为驶入车道;第二道路区域包括车道L6、L7、L8、L9和L10,L6和L7为驶入车道,L8、L9和L10为驶出车道;第三道路区域包括车道L11、L12和L13,L11为驶出车道,L12和L13为驶入车道。则建立车道映射关系如表1所示。
表1.车道映射关系
S3:根据车道映射关系生成虚拟连接线。
S3-1:驶出车道结束节点为p1(x1,y1,z1),驶入车道起始节点为p2(x2,y2,z2),如图3所示,计算映射距离:
S3-2:在驶出车道的车道参考线R1的延长线上取一点M可得到驶出方向矢量MP1,使得|MP1|=k×|P2P1|,同时在驶入车道的的车道参考线R2的反向延长线上取一点N可得到驶入方向矢量NP2,使得|NP2|=k×|P2P1|,其中k表示比例因子,例如为0.02。
S3-3:根据驶出方向矢量MP1和驶入方向矢量NP2生成虚拟连接线。
本实施例中,可采用三阶bezier曲线生成虚拟连接线,虚拟连接线的起点为P1,第一控制点为M,第二控制点为N,终点为P2;第一控制点为M,第二控制点为N可作为控制曲线的走向。
基于上述方法,本发明还提供一种智能网联车用地图拓扑连线生成系统,包括数据采集装置、道路拓扑生成模块、车道映射生成模块和连线生成模块。
数据采集装置,用于采集道路信息,道路信息包括车道数量、车道行驶方向、车道标线、车道节点、车道指示标志、车道参考线;
道路拓扑生成模块,用于根据道路信息生成车道之间的拓扑关系;
车道映射生成模块,用于根据车道之间的拓扑关系生成驶出车道和驶入车道的映射关系。
连线生成模块,用于根据驶出车道和驶入车道的映射关系生成虚拟连接线。
本领域的普通技术人员可以理解,上述各实施方式是实现本发明的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本发明的精神和范围。
- 一种智能网联车用地图拓扑连线生成方法
- 一种基于智能网联汽车的高精度动态地图生成与应用方法