一种骨骼接合手术中骨间压力检测装置及方法
文献发布时间:2023-06-19 11:45:49
技术领域
本发明一种骨骼接合手术中骨间压力检测装置及方法,属于检测骨骼接合手术中骨间压力的装置技术领域。
背景技术
随着社会的发展,人们的生活节奏越来越快、活动强度越来越大,由于各种原因导致了越来越多的人遭遇骨折等骨骼疾病而需要进行骨骼接合手术,而在骨骼接合手术的临床治疗上,适当地控制人体骨骼间压力的大小对断骨的正常愈合起着关键的作用。近年来。在骨骼接合手术的临床治疗上,一般是将断骨复位、穿钉固定后采用支架通过大腿肌肉给骨骼施加一定的压应力促其生长,骨间压力大小全凭医生的经验或者是进行一个粗略的压力估计,没有一个精准测量和量化骨骼间压力大小的方法和手段。因此,针对现有技术中存在的压力检测精准性低和检测装置尺寸不满足骨骼间隙的问题,提出了一种能定量和精准测量的适合检测骨骼间隙压力大小的装置及方法。
发明内容
本发明为了克服现有技术中存在的不足,所要解决的技术问题为:提供一种骨骼接合手术中骨间压力检测装置结构的改进。
为了解决上述技术问题,本发明采用的技术方案为:一种骨骼接合手术中骨间压力检测装置,包括手握式壳体,所述手握式壳体包括手柄,所述手握式壳体的正面设置有显示屏和开关按钮,所述手握式壳体的内部固定有凸型压力传感器和控制电路板,所述凸型压力传感器包括微型压力传感器和设置在微型压力传感器上下表面形成悬梁臂的金属片,其中位于微型压力传感器上表面的金属片设置为凸形,所述凸型压力传感器悬梁臂的两端分别伸出手握式壳体的两端;
所述控制电路板上集成有微控制器,所述微控制器通过导线分别与显示屏、开关按钮、微型压力传感器相连。
所述手握式壳体的两端设置有可拆卸的套盖。
所述金属片具体采用不锈钢片,所述不锈钢片的厚度设置为0.1mm-1mm。
所述微型压力传感器与金属片之间通过热熔胶进行固定。
所述手握式壳体具体设置为圆筒形或方形。
所述微型压力传感器具体采用型号为SBT760F,传感器厚度为3.5mm。
所述凸型压力传感器的上下悬梁臂之间的厚度设置为1mm-3mm。
一种骨骼接合手术中骨间压力检测方法,包括如下步骤:
步骤一:打开手握式壳体两端的套盖,将凸型压力传感器两端金属片进行消毒;
步骤二:将检测装置一端的金属片直接插入待检测压力的骨骼间隙,通过计算公式F1=0.447*f+0.0152,在显示屏上显示出检测到的压力值F1,其中f为金属片接触到骨骼测得的压力值,F1为微型压力传感器测得的检测装置一端的压力值;
步骤三:将检测装置另一端的金属片直接插入待检测压力的骨骼间隙,通过计算公式F2=0.459*f-0.0878,在显示屏上显示出检测到的压力值F2,其中f为金属片接触到骨骼测得的压力值,F2为微型压力传感器测得的检测装置另一端的压力值;
步骤四:比较F1和F2的大小,当两者的监测数值一样或在设定误差范围内,取F=F1+F2/2,其中F为骨骼间隙的实际压力大小值;当两者的监测数值不一样或超过设定误差范围内,剔除掉该错误值,重新步骤二;
步骤五:骨骼间隙压力值测完之后,将凸型压力传感器两端金属片再次进行消毒后套上套盖。
所述步骤三中设定的误差范围为F1与F2的差值大小在±0.1mm之间。
本发明相对于现有技术具备的有益效果为:本发明提供的骨骼接合手术中骨骼间隙压力检测装置能精准检测骨间压力大小,以量化的形式显示出来,使得医生在骨骼接合手术中更快速地获取骨间压力大小,以节省手术时间和提高手术成功率;凸型压力传感器的联动装置具有明显的函数关系特征,使得目前检测装置尺寸不满足骨骼间隙大小的问题得以解决,又由于此传感器的精确度高和本文对于信号处理得当,使得骨骼接合手术中量化和精确压力大小的需求得以实现。
附图说明
下面结合附图对本发明做进一步说明:
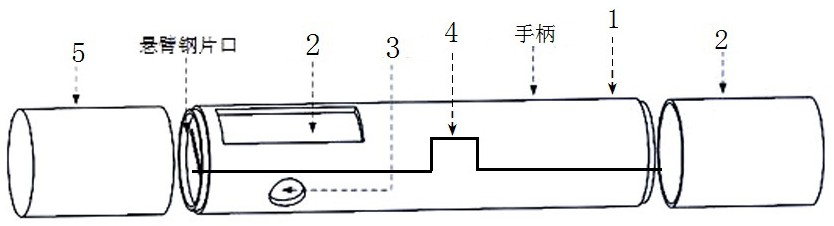
图1为本发明的结构示意图;
图2为本发明凸型压力传感器的结构示意图;
图3为本发明标定试验对骨—钢片接触部分施加力和压力传感器产生力的示意图;
图4为本发明标定试验的f与F的相关性示意图;
图5为本发明标定试验的f与F的函数关系曲线图;
图中:1为手握式壳体、2为显示屏、3为开关按钮、4为凸型压力传感器、5为套盖、41为微型压力传感器、42为金属片。
具体实施方式
如图1至图5所示,本发明一种骨骼接合手术中骨间压力检测装置,包括手握式壳体1,所述手握式壳体1包括手柄,所述手握式壳体1的正面设置有显示屏2和开关按钮3,所述手握式壳体1的内部固定有凸型压力传感器4和控制电路板,所述凸型压力传感器4包括微型压力传感器41和设置在微型压力传感器41上下表面形成悬梁臂的金属片42,其中位于微型压力传感器41上表面的金属片设置为凸形,所述凸型压力传感器4悬梁臂的两端分别伸出手握式壳体1的两端;
所述控制电路板上集成有微控制器,所述微控制器通过导线分别与显示屏2、开关按钮3、微型压力传感器41相连。
所述手握式壳体1的两端设置有可拆卸的套盖5。
所述金属片42具体采用不锈钢片,所述不锈钢片的厚度设置为0.1mm-1mm。
所述微型压力传感器41与金属片42之间通过热熔胶进行固定。
所述手握式壳体1具体设置为圆筒形或方形。
所述微型压力传感器41具体采用型号为SBT760F,传感器厚度为3.5mm。
所述凸型压力传感器4的上下悬梁臂之间的厚度设置为1mm-3mm。
一种骨骼接合手术中骨间压力检测方法,包括如下步骤:
步骤一:打开手握式壳体1两端的套盖5,将凸型压力传感器两端金属片进行消毒;
步骤二:将检测装置一端的金属片42直接插入待检测压力的骨骼间隙,通过计算公式F1=0.447*f+0.0152,在显示屏2上显示出检测到的压力值F1,其中f为金属片42接触到骨骼测得的压力值,F1为微型压力传感器测得的检测装置一端的压力值;
步骤三:将检测装置另一端的金属片42直接插入待检测压力的骨骼间隙,通过计算公式F2=0.459*f-0.0878,在显示屏2上显示出检测到的压力值F2,其中f为金属片42接触到骨骼测得的压力值,F2为微型压力传感器测得的检测装置另一端的压力值;
步骤四:比较F1和F2的大小,当两者的监测数值一样或在设定误差范围内,取F=F1+F2/2,其中F为骨骼间隙的实际压力大小值;当两者的监测数值不一样或超过设定误差范围内,剔除掉该错误值,重新步骤二;
步骤五:骨骼间隙压力值测完之后,将凸型压力传感器两端金属片再次进行消毒后套上套盖。
所述步骤三中设定的误差范围为F1与F2的差值大小在±0.1mm之间。本发明提供的用于定量检测骨骼接合手术中骨骼间隙受到压力的装置。该装置包括型号为SBT760F的微型压力传感器(传感器厚度为3.5mm),不锈钢片,硬件控制电路板,外壳;其中,不锈钢片固定在微型压力传感器上下表面,形成一个“凸”型式压力传感器的联动装置。当在骨骼接合手术中测量骨骼间隙压力时,“凸”型式压力传感器的不锈钢片与骨骼间隙上下表面接触,采集并经过相关信号处理后,显示压力数据,从而达到符合检测骨骼间隙压力大小的目的。
(1)传感器使用设计
由于本装置是用来检测骨骼间隙所受压力,故对于与骨骼间隙接触的检测部分的薄度要求比较高。故需要对传感器的使用进行改造,方法就是不锈钢片与压力传感器形成一个“凸”型式压力传感器装置进行检测骨骼间隙所受压力。其中,不锈钢片固定在微型压力传感器上下表面,形成悬臂梁。当在骨骼接合手术中测量骨骼间隙压力时,悬臂梁与骨骼间隙上下表面接触,从而达到符合检测骨骼间隙压力大小的目的。传感器的使用改造整体设计如图2所示。
(2)检测装置的外壳设计
一种用于骨骼接合手术中骨骼间隙压力检测装置的外壳设计主要以轻小、便携为特点,并结合考虑了传感器使用设计,最终确定为手握式的检测装置,其中手握部分主要是圆筒,即图1所示的圆形手柄,圆筒部分留出OLED显示屏和开关按钮,圆筒两端伸出部分是不锈钢片,即不锈钢片从圆筒两端的两个悬臂钢片口伸出固定,不锈钢片伸出部分设计了套盖,以便不用之时盖住,便于携带和保存。
(3)使用方法
当医生进行骨骼接合手术需要检测骨骼间隙压力时,打开检测装置两边的套盖,经消毒后,先将检测装置的一端直接插入骨骼间隙,显示屏记录并显示压力大小,再将检测装置的另一端同样直接插入骨骼间隙,显示屏记录并显示压力大小,如果两次的检测数据一样或者在误差允许范围(±0.1N)内,即取两次的平均压力数据为此时骨间隙的压力大小数据。最后,使用完并消毒后套盖。
(4)信号采集
采取定量测量的方法可以保证压力信号的精准性,而微型压力传感器的特性就是定量测量,其精度和线性度好,故应用微型压力传感器来采集压力信号。
(5)信号处理
由于骨骼间隙是与不锈钢片直接接触,使得压力传感器受力产生模拟信号,此时的模拟信号并不是不锈钢片与骨骼间隙接触部分的信号,故需要对骨—钢片接触部分和压力传感器进行信号对应的标定。此标定通过大量实验进行标定,得到标定好的公式,通过软件实现骨—钢片接触部分和压力传感器信号之间的算法关系,然后对标定好的模拟信号进行模数转换,经过误差消除和相关算法实现压力信号与力之间的对应,最后通过显示屏显示出来。
(6)标定实验
为了验证“凸”型式压力传感器的有效性,做了关于骨—钢片接触部分和压力传感器之间信号对应的标定实验。在相同的测量条件下,首先,对骨—钢片接触部分施加0—50N之间同样大小的力f,用砝码0—5kg来代替,g取9.8N/kg,“凸”型式压力传感器两边都要进行施加力的目的主要是为了验证两边在同样力大小的情况下得到F是否一样,以确保装置的可行性和有效性。然后,对微型压力传感器进行信号两次采集、处理和显示,记录对应的F1和F2,此为一组实验。对骨—钢片接触部分施加力和压力传感器产生力的示意图如图3所示,在“凸”型式压力传感器两边在同样大小f的情况下,通过49次实验,得到49组f与F对应组数据,如下表1、表2所示。
表1
表2
通过Origin软件平台进行数据整理,使以上实验对应组数据可视化,以便清晰地看出数据的相关性,f与F的相关性如图4所示。从图中可以看出f与F具有一定的函数关系。于是本文借助Matlab软件进行数据拟合,得到f与F的函数关系曲线图,如图5所示和拟合的函数关系式,即需要标定的公式。得到F与f的函数关系:
F1=0.447*f + 0.0152,F2=0.459*f - 0.0878。
从上式可以看出F1 和F2的函数关系相近,又由于F1 和F2是同一f下的值,故为了使得实验结果更加精确,取F1 和F2的平均函数关系,得
F=0.453*f - 0.0363。
然后把公式通过软件编程实现,即完成了“凸”型式压力传感器对应关系的标定。最后把实现该装置所有功能的程序代码通过下载口烧录到硬件电路板中,完成硬件的组装,实现装置。
本发明通过不锈钢片固定在微型压力传感器上下表面形成的“凸”型式压力传感器的联动装置用于骨骼接合手术中骨间隙压力的检测,实现了量化和精确骨骼间隙压力大小
关于本发明具体结构需要说明的是,本发明采用的各部件模块相互之间的连接关系是确定的、可实现的,除实施例中特殊说明的以外,其特定的连接关系可以带来相应的技术效果,并基于不依赖相应软件程序执行的前提下,解决本发明提出的技术问题,本发明中出现的部件、模块、具体元器件的型号、连接方式除具体说明的以外,均属于本领域技术人员在申请日前可以获取到的已公开专利、已公开的期刊论文、或公知常识等现有技术,无需赘述,使得本案提供的技术方案是清楚、完整、可实现的,并能根据该技术手段重现或获得相应的实体产品。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
- 一种骨骼接合手术中骨间压力检测装置及方法
- 一种基于拉力与压力关系模型的骨间压力测量系统及方法