一种移动机器人的充电站结构
文献发布时间:2023-06-19 11:45:49
技术领域
本发明涉及移动机器人充电技术领域,具体地说是一种移动机器人的充电站结构。
背景技术
近年来,随着机器人事业的蓬勃发展,移动机器人自动充电技术的应用已经越来越广泛,而机器人充电站作为实现机器人自主充电技术的关键部件,其结构设计至关重要。充电站应满足在与机器人接触时进行充电,当机器人离开时供电停止的要求,但现有充电站的防护限位装置与误触发保护机制仍存在不足之处,导致机器人与充电站接触稳定性差,并且存在安全隐患,容易造成电极的误触发。在充电站固定时,还往往遇到墙面与地面不垂直、墙角线突出等情况,导致充电站倾斜或无法靠墙固定的问题。
发明内容
本发明的目的在于提供一种移动机器人的充电站结构,可实现充电电极自动充电与航插手动充电两种充电模式,并且壳体后侧的调整安装板能够自适应墙面的少许倾斜,并且能够完美避开突出的墙角线,让充电站能够固定牢固不晃动或倾斜。
本发明的目的是通过以下技术方案来实现的:
一种移动机器人的充电站结构,包括底板、壳体和充电机构,壳体设于底板上,充电机构设于壳体中,所述充电机构设有微动开关和可移动的充电电极,且所述充电电极后端设有可触发对应微动开关的行程撞杆,所述壳体上设有切换按钮和航插,所述壳体内部设有控制板、接触器A、接触器B和电源模块,当切换按钮选择充电电极输出且所有微动开关均被对应的行程撞杆触发时,所述控制板控制电源模块通过接触器A给充电电极供电,当切换按钮选择航插输出时,所述控制板控制电源模块通过接触器B给航插供电。
所述充电机构包括充电电极、内绝缘座、压缩弹簧和微动开关),其中两个充电电极后端均设有导向滑块,且所述导向滑块后侧均设有导向柱,内绝缘座中设有两个上下平行的滑槽,且所述导向滑块和导向柱可移动地设于对应的滑槽中,所述导向滑块上设有行程撞杆,所述内绝缘座两侧设有微动开关,且所述行程撞杆穿过内绝缘座并随导向滑块移动触发对应侧的微动开关,所述导向柱上套装有压缩弹簧,且所述导向滑块后移压缩所述压缩弹簧。
所述内绝缘座固装于所述壳体的前壳内侧,所述前壳外侧设有外绝缘座,且所述外绝缘座内设有供充电电极移动的通孔。
所述导向滑块上设有凹槽,所述压缩弹簧一端设于对应导向滑块的凹槽中,另一端与内绝缘座中对应滑槽后端的滑槽端壁相抵。
所述壳体内的底板设有支架,且所述微动开关安装于对应的支架上。
所述壳体的前壳两侧各装有一个风扇,且两个风扇风向一进一出。
所述壳体的顶板上设有拎手。
所述壳体后侧设有调整安装板,且所述调整安装板与所述壳体的背板铰接。
所述壳体后侧设有背板固定座和调节板固定座,其中背板固定座与壳体的背板固连,调节板固定座与对应的背板固定座铰接,所述调节板固定座上设有卡口,所述调整安装板上预拧有连接螺栓,且所述调节板固定座上的卡口与对应的连接螺栓卡合。
本发明的优点与积极效果为:
1、本发明可实现充电电极自动充电与航插手动充电两种充电模式,并且两种充电方式都安全可靠。
2、本发明的壳体后侧设有调整安装板,且所述调整安装板能够自适应墙面的少许倾斜,并且能够完美避开突出的墙角线,让充电站能够固定牢固不晃动或倾斜。
附图说明
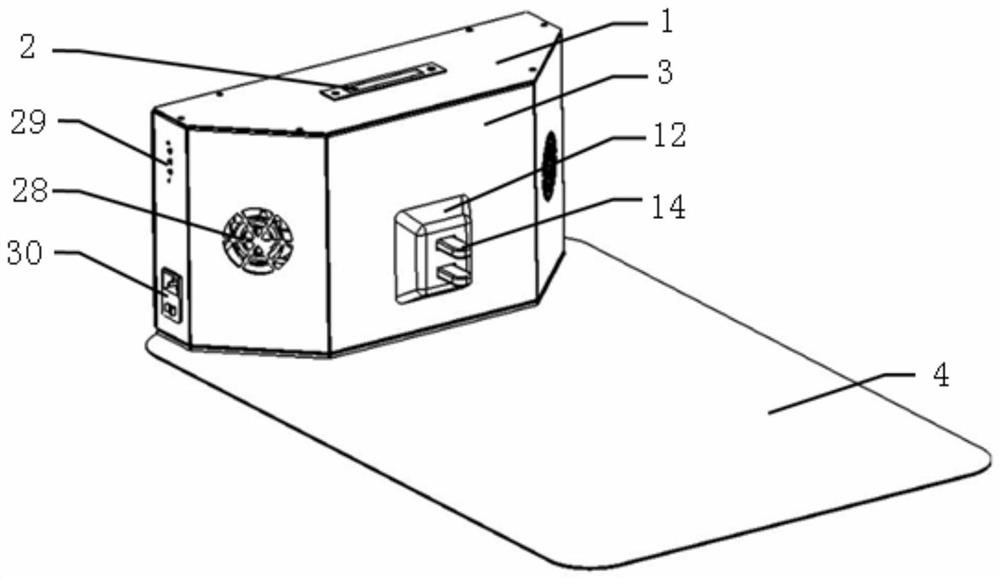
图1为本发明的结构示意图,
图2为本发明的另一角度结构示意图,
图3为图1中壳体内部的充电机构示意图,
图4为图3中的充电电极结构示意图,
图5为图1中壳体内的元件配置示意图,
图6为图1中的拎手示意图,
图7为图2中的调整安装板示意图。
其中,1为顶板,2为拎手,3为前壳,4为底板,5为背板,6为调整安装板,7为调节板固定座,8为背板固定座,9为连接螺栓,10为销轴,11为外卡簧,12为外绝缘座,13为内绝缘座,14为充电电极,15为导向柱,16为压缩弹簧,17为行程撞杆,18为左支架,19为右支架,20为微动开关,21为控制板,22为接触器A,23为接触器B,24为电源模块,25为蜂鸣器,26为切换按钮,27为航插,28为电源开关,29为指示灯,30为风扇,31为导向滑块,32为滑槽端壁,33为凹槽。
具体实施方式
下面结合附图对本发明作进一步详述。
如图1~7所示,本发明包括底板4、壳体和充电机构,壳体设于底板4上,充电机构设于壳体中,如图3~4所示,所述充电机构包括充电电极14、内绝缘座13、压缩弹簧16和微动开关20,其中两个充电电极14后端均设有导向滑块31,且所述导向滑块31后侧均设有导向柱15,内绝缘座13中设有两个上下平行的滑槽,且所述导向滑块31和导向柱15可移动地设于对应的滑槽中,所述导向滑块31上设有行程撞杆17,所述内绝缘座13两侧设有微动开关20,且所述行程撞杆17随导向滑块31移动触发对应侧的微动开关20,在所述内绝缘座13两侧设有供所述行程撞杆17伸出及移动的长槽孔,所述导向柱15上套装有压缩弹簧16,且所述导向滑块31后移压缩所述压缩弹簧16,如图2和图7所示,所述壳体后侧设有调整安装板6,且所述调整安装板6与所述壳体的背板5铰接。
如图3~4所示,所述内绝缘座13固装于所述壳体的前壳3内侧,所述前壳3外侧设有外绝缘座12,且所述外绝缘座12内设有供充电电极14移动的通孔。
如图3~4所示,所述导向滑块31上设有凹槽33,所述压缩弹簧16一端设于对应导向滑块31的凹槽33中,另一端与内绝缘座13中对应滑槽后端的滑槽端壁32相抵,所述导向滑块31后移即压缩所述压缩弹簧16。
如图3~4所示,所述壳体内的底板4上,在所述内绝缘座13的左侧设有左支架18,在所述内绝缘座13的右侧设有右支架19,所述微动开关20安装于对应的支架上。所述微动开关20为本领域公知技术且为市购产品。
如图1~2和图5所示,所述壳体的前壳3一侧设有切换按钮26和航插27,另一侧设有电源开关28和指示灯29,所述壳体内的底板4上除了所述两个微动开关20的支架外,还设有控制板21、接触器A22、接触器B23、电源模块24和蜂鸣器25。电源开关28用于整个充电站的输入电源通断控制,指示灯29通过灯光颜色指示充电站的各种使用状态,蜂鸣器25用于充电站的状态报警,切换按钮26用于切换该充电站选择充电电极14输出还是航插27输出。所述切换按钮26、航插27、电源开关28、指示灯29、控制板21、接触器A22、接触器B23、电源模块24和蜂鸣器25均为本领域公知技术且为市购产品。
当切换按钮26选择充电电极14输出时,控制板21控制接触器A22生效。机器人本体后退,本体电极压着充电电极14后退,直至微动开关20被行程撞杆17触发,控制板21收到触发信号后控制电源模块24通过接触器A22给充电电极14供电,机器人进入充电状态,并且当且仅当两个微动开关20都被触发时,充电电极14才进入供电状态,保证了充电的安全性;当机器人本体充满电离开后,充电电极14在压缩弹簧16的弹力下恢复原位,行程撞杆17跟随向外移动,微动开关20重新回到断开状态,控制板21发出信号让电源模块24停止供电,机器人完成充电过程。
当切换按钮26选择航插27输出时,控制板21控制接触器B22生效,控制板21控制电源模块24通过接触器B23给航插27供电,使用人员可以通过手动连接航插27对机器人进行充电,此时充电电极14不能充电,也没有误触发的危险。
如图1和图5所示,所述壳体的前壳3两侧还装有风扇30,风向一进一出,用于内部器件的散热。
如图6所示,所述壳体的顶板1上设有拎手2,所述拎手2平时可藏起,充电站需要移动时,工作人员可将拎手2转出并将充电站拎起。
如图2和图7所示,所述壳体后侧设有背板固定座8和调节板固定座7,其中背板固定座8与壳体的背板5固连,调节板固定座7中部与对应的背板固定座8中部通过销轴10铰接,所述销轴10通过外卡簧11固定,所述调节板固定座7上设有卡口,所述调整安装板6上预拧有连接螺栓9,且所述调节板固定座7通过卡口与对应的连接螺栓9卡合。安装时,所述调整安装板6提前固定在靠近地面的侧墙上,并提前预拧四个连接螺栓9,然后将背板固定座8固定在壳体的背板5上,将充电站向后接近调整安装板6,并将四个连接螺栓9卡入调节板固定座7的卡口中,再将四个连接螺栓9拧紧,便完成了充电站的靠墙固定。由于调节板固定座7与背板固定座8中部铰接,本发明可自适应调节角度,当侧墙与地面不垂直时,可保证充电站与侧墙的充分接触,避免充电站的晃动,也可充分避开墙角线对充电站固定的困扰。
本发明的工作原理为:
本发明利用切换按钮26切换充电站选择充电电极14输出还是航插27输出,从而实现两种充电模式。
当切换按钮26选择充电电极14输出时,控制板21控制接触器A22生效。机器人本体后退,机器人本体电极压着充电电极14后退,直至微动开关20被行程撞杆17触发,控制板21收到触发信号后控制电源模块24通过接触器A22给充电电极14供电,机器人进入充电状态,并且当且仅当两个微动开关20都被触发时,充电电极14才进入供电状态,保证了充电的安全性;当机器人本体充满电离开后,充电电极14在压缩弹簧16的弹力下恢复原位,行程撞杆17跟随向外移动,微动开关20重新回到断开状态,控制板21发出信号让电源模块24停止供电,机器人完成充电过程。
当切换按钮26选择航插27输出时,控制板21控制接触器B22生效,控制板21控制电源模块24通过接触器B23给航插27供电,使用人员可以通过手动连接航插27对机器人进行充电,此时充电电极14不能充电,也没有误触发的危险。
另外本发明安装时,将调整安装板6提前固定在靠近地面的侧墙上,并提前预拧四个连接螺栓9,然后将背板固定座8固定在壳体的背板5上,将充电站向后接近调整安装板6,并将四个连接螺栓9卡入调节板固定座7的卡口中,再将四个连接螺栓9拧紧,便完成了充电站的靠墙固定。由于调节板固定座7与背板固定座8中部铰接,本发明可自适应调节角度,当侧墙与地面不垂直时,可保证充电站与侧墙的充分接触,避免充电站的晃动,也可充分避开墙角线对充电站固定的困扰。
- 一种移动机器人的充电站结构
- 一种移动机器人充电站的调节方法、系统和装置