测量系统、测量方法及曝光装置
文献发布时间:2023-06-19 11:45:49
本发明申请是国际申请日为2015年12月22日、国际申请号为PCT/JP2015/085850、进入中国国家阶段的国家申请号为201580076893.0、发明名称为“移动体的控制方法、曝光方法、器件制造方法、移动体装置及曝光装置”的发明申请的分案申请。
技术领域
本发明涉及移动体的控制方法、曝光方法、器件制造方法、曝光装置,更详细而言,涉及载置设置有多个标记的物体的移动体的控制方法、包含上述移动体的控制方法在内的曝光方法、使用了上述曝光方法的器件制造方法、包含载置设置有多个标记的物体的移动体的移动体装置、及具备上述移动体装置的曝光装置。
背景技术
目前,在制造半导体元件(集成电路等)、液晶显示元件等电子器件(微型器件)的光刻工序中,使用步进扫描方式的投影曝光装置(所谓扫描步进机(也称为扫描仪))等。
在这种曝光装置中,由于例如在晶圆或玻璃板(以下统称为“晶圆”)上重叠形成有多层图案,所以进行用于使已形成于晶圆上的图案和光罩或标线片(以下统称为“标线片”)所具有的图案成为最佳的相对位置关系的操作(所谓对准)。另外,作为在这种对准中使用的对准传感器,已知有通过使测量光相对于设置于晶圆上的格子标记进行扫描(追随晶圆W的移动)能够迅速地进行该格子标记的检测的系统(例如,参照专利文献1)。
在此,为了提高重叠精度也期望进行多次格子标记的位置测量,具体而言,期望准确且高速地进行设定于晶圆上的所有照射区域的格子标记的位置测量。
现有技术文献
专利文献1:美国专利第8593646号说明书
发明内容
根据第一方面,提供一种移动体的控制方法,包含:使移动体沿第一轴的方向移动,同时一边使从标记检测系统照射的测量光相对于载置于所述移动体的物体上设置的多个标记的中的第一标记沿所述第一轴的方向扫描,一边检测所述第一标记;测量所述第一标记与所述测量光之间的位置关系;以及基于测量出的所述位置关系,调整在与所述第一轴交叉的第二轴的方向上的所述测量光与所述移动体之间的相对位置。
根据第二方面,提供一种曝光方法,包含:利用第一方面的移动体的控制方法控制供设置有多个标记的物体载置的所述移动体;以及基于所述多个标记的检测结果控制所述移动体的在包含所述第一轴及所述第二轴的二维平面内的位置,同时对所述物体使用能量束来形成规定图案。
根据第三方面,提供一种器件制造方法,包含:使用第二方面的曝光方法对基板进行曝光;以及将曝光后的所述基板显影。
根据第四方面,提供一种移动体装置,其具备:移动体,其能够在包含第一轴及与所述第一轴交叉的第二轴的二维平面内移动;标记检测系统,其使测量光相对于在载置于所述移动体的物体上设置的多个标记沿所述第一轴的方向扫描;以及控制系统,其使所述移动体沿所述第一轴的方向移动,同时使用所述标记检测系统进行所述标记的检测,所述控制系统检测所述多个标记中的第一标记,并且测量所述第一标记与所述测量光之间的位置关系,基于测量出的所述位置关系来调整在与所述第一轴交叉的第二轴的方向上的所述测量光与所述移动体的相对位置。
根据第五方面,提供一种曝光装置,其包含:第四方面的移动体装置,其在所述移动体上载置有设置有多个标记的物体;以及图案形成装置,其对基于所述多个标记的检测结果而被控制所述二维平面内的位置的载置在所述移动体上的所述物体利用能量束,形成规定的图案。
附图说明
图1是概略性表示第一实施方式的曝光装置的结构的图。
图2的(a)~图2的(c)是表示形成于晶圆上的格子标记的一例(其1~其3)的图。
图3是表示图1的曝光装置所具备的对准系统的结构的图。
图4是图3的对准系统所具备的读出用衍射光栅的俯视图。
图5的(a)是表示基于图3的对准系统所具备的检测系统的输出而产生的波形的一例的图,图5的(b)是调整图5的(a)的波形的横轴的波形,图5的(c)是晶圆上的格子标记的位置的求出方法的概念图。
图6是表示曝光装置的控制系统的框图。
图7是用于说明使用了图1的曝光装置的曝光动作的流程图。
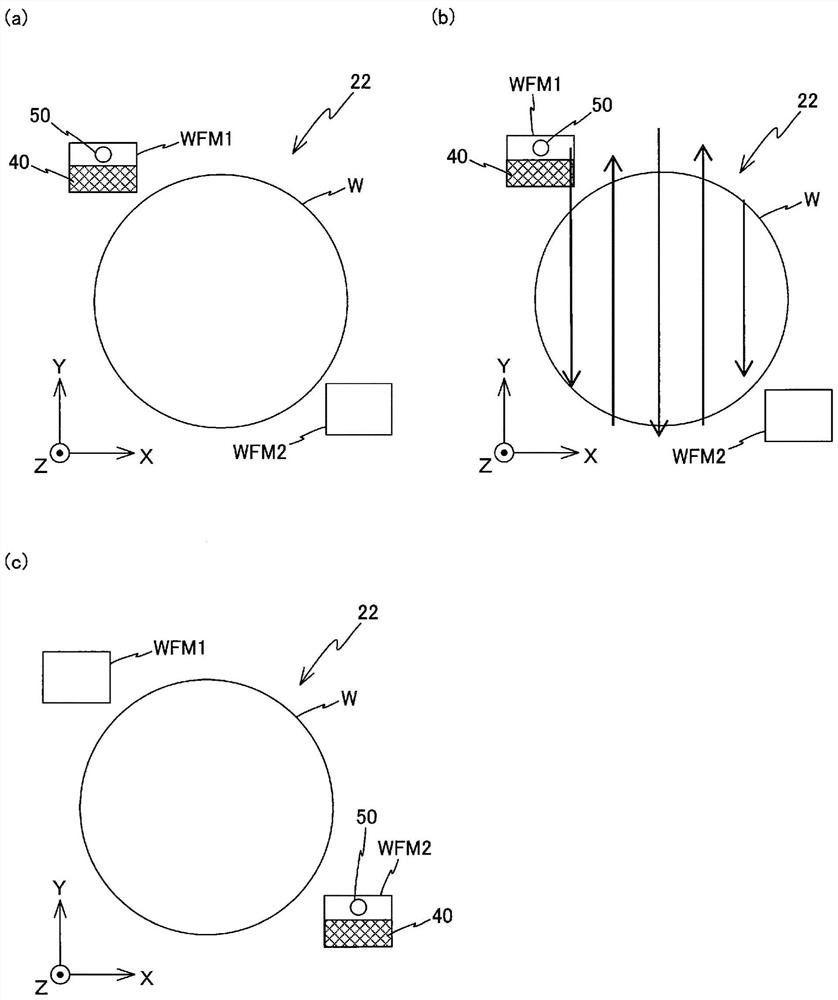
图8的(a)~图8的(c)是用于说明对准测量动作及聚焦映射动作的图(其1~其3)。
图9是用于说明对准测量动作的流程图。
图10是用于说明对准测量动作时的晶圆载台与对准系统的测量光的相对位置关系的图。
图11是表示图3的对准系统所具备的可动镜的驱动信号的一例的图。
图12的(a)~图12的(d)是用于说明第二实施方式的曝光装置中的对准测量动作的图(其1~其4)。
图13是用于说明第二实施方式的曝光动作的流程图。
图14是用于说明第二实施方式的对准测量动作的流程图。
图15的(a)是表示从变形例的对准系统入射格子标记的测量光及衍射光的图,图15的(b)及图15的(c)是表示物镜的光瞳面上的测量光及衍射光的位置的图(其1及其2)。
图16是表示对准系统的检测系的变形例的图。
具体实施方式
(第一实施方式)
以下,基于图1~图11说明第一实施方式。
图1概略性表示第一实施方式的曝光装置10的结构。曝光装置10为步进扫描方式的投影曝光装置即所谓的扫描仪。如后述,在本实施方式中,设置有投影光学系统16b,以下,设与该投影光学系统16b的光轴AX平行的方向为Z轴方向、在与其正交的面内相对扫描标线片R和晶圆W的方向为Y轴方向、与Z轴及Y轴正交的方向为X轴方向,以绕X轴、Y轴、及Z轴的旋转(倾斜)方向分别为θx、θy、及θz方向进行说明。
曝光装置10具备照明系统12、标线片载台14、投影单元16、包含晶圆载台22在内的晶圆载台装置20、多点焦点位置检测系统40、对准系统50、及它们的控制系统。图1中,在晶圆载台22上载置有晶圆W。
例如如美国专利申请公开第2003/0025890号说明书等公开的那样,照明系统12包含光源和具有具备光学积分器的照度均匀化光学系统及标线片遮帘(均未图示)的照明光学系统。照明系统12利用照明光(曝光用光)IL以几乎均匀的照度对照明区域IAR,该照明区域IAR是在利用标线片遮帘(屏蔽系统)设定(限制)的标线片R上在X轴方向上细长的狭缝状的照明区域。作为照明光IL,使用例如ArF准分子激光(波长193nm)。
在标线片载台14上,通过例如真空吸附而固定有在图案面(图1中下表面)形成有电路图案的标线片R。标线片载台14能够通过包含例如线性马达等在内的标线片载台驱动系统32(图1中未图示,参照图6)在XY平面内微量驱动,并且能够以规定扫描速度沿扫描方向(图1中纸面内左右方向即Y轴方向)驱动。标线片载台14的XY平面内的位置信息(包含θz方向的旋转量信息)是通过包含例如干涉仪系统(或者编码器系统)在内的标线片载台位置测量系统34以例如0.5~1nm左右的分辨率随时测量的。标线片载台位置测量系统34的测量值被传送至主控制装置30(图1中未图示,参照图6)。主控制装置30基于标线片载台位置测量系统34的测量值计算标线片载台14的X轴方向、Y轴方向及θz方向的位置,并且基于该算出结果控制标线片载台驱动系统32,由此控制标线片载台14的位置(及速度)。另外,图1中虽未图示,但曝光装置10具备用于进行形成于标线片R上的标线片对准标记的检测的标线片对准系统18(参照图6)。作为标线片对准系统18,能够使用例如美国专利第5646413号说明书、美国专利申请公开第2002/0041377号说明书等所公开的结构的对准系统。
投影单元16配置于标线片载台14的图1中的下方。投影单元16包含镜筒16a、和收纳于镜筒16a内的投影光学系统16b。作为投影光学系统16b,使用例如由沿着与Z轴方向平行的光轴AX排列的多个光学元件(透镜元件)构成的折射光学系统。投影光学系统16b例如两侧远心且具有规定投影倍率(例如,1/4、1/5或1/8等)。因此,当利用照明系统12照明标线片R上的照明区域IAR时,利用从图案面与投影光学系统16b的第一面(物体面)大致一致地配置的标线面R通过的照明光IL,经由投影光学系统16b(投影单元16)将该照明区域IAR内的标线片R的电路图案的缩小像(电路图案的一部分缩小像)形成在配置于投影光学系统16b的第二面(像面)侧的、表面涂敷有抗蚀剂(感应剂)的晶圆W上的与该照明区域IAR共轭的区域(以下称为曝光区域)IA。然后,通过使标线片载台14和晶圆载台22的同步移动,使标线片R相对于照明区域IAR(照明光IL)沿扫描方向(Y轴方向)移动,并且使晶圆W相对于曝光区域IA(照明光IL)沿扫描方向(Y轴方向)移动,由此进行晶圆W上的一个照射区域(区划区域)的扫描曝光,在该照射区域转印标线片R的图案。即,在本实施方式中,通过照明系统12、标线片R及投影光学系统16b在晶圆W上生成图案,利用照明光IL对的晶圆W上的感光层(抗蚀剂层)进行曝光来在晶圆W上形成该图案。
晶圆载台装置20具备配置于基座28上方的晶圆载台22。晶圆载台22包含载台主体24和搭载于该载台主体24上的晶圆台26。载台主体24通过固定于其底面的未图示的非接触轴承例如空气轴承,隔着数μm左右的游隙支承于基座28上。载台主体24构成为通过包含例如线性马达(或者平面马达)的晶圆载台驱动系统36(图1中未图示,参照图6)相对于基座28沿水平面内3个自由度方向(X、Y、θz)可驱动。晶圆载台驱动系统36包含将晶圆台26相对于载台主体24在6个自由度方向(X、Y、Z、θx、θy、θz)微量驱动的微小驱动系统。晶圆台26的6个自由度方向的位置信息通过例如包含干涉仪系统(或者编码器系统)的晶圆载台位置测量系统38以例如0.5~1nm左右的分辨率随时测量。晶圆载台位置测量系统38的测量值被传送至主控制装置30(图1中未图示,参照图6)。主控制装置30基于晶圆载台位置测量系统38的测量值计算晶圆台26在6个自由度方向上的位置,并且基于该算出结果控制晶圆载台驱动系统36,由此,控制晶圆台26的位置(及速度)。主控制装置30也基于晶圆载台位置测量系统38的测量值控制载台24在XY平面内的位置。
在此,在晶圆W上的各照射区域,作为对准系统50的检测对象,形成有至少一个图2的(a)所示的格子标记GM。此外,格子标记GM实际上形成于各照射区域的切割线内。
格子标记GM包含第一格子标记GMa和第二格子标记GMb。第一格子标记GMa由如下的反射型衍射光栅构成:在XY平面内沿相对于X轴呈45°的角度的方向(以下,为了方便而称为α方向)延伸的格子线在XY平面内沿与α方向正交的方向(以下,为了方便而称为β方向)以规定间隔(规定节距)形成,且以β方向为周期方向。第二格子标记GMb由沿β方向延伸的格子线在α方向上以规定间隔(规定节距)形成的、以α方向为周期方向的反射型衍射光栅。第一格子标记GMa和第二格子标记GMb以在轴方向的位置相同的方式在X轴方向连续(相邻)配置。此外,图2的(a)中,为了方便图示,格子节距以远大于实际上的节距的方式图示。其它图中的衍射光栅也相同。此外,第一格子标记GMa的节距和第二格子标记GMb的节距可以相同,也可以互不相同。另外,图2的(a)中,第一格子标记GMa和第二格子标记GMb相接,但也可以不相接。
返回图1,多点焦点位置检测系统40为例如与美国专利第5448332号说明书等所公开的相同结构的对晶圆W的Z轴方向上的位置信息进行测量的斜入射方式的位置测量装置。多点焦点位置检测系统40,配置在配置于投影单元16的-Y侧的对准系统50的更-Y侧。由于多点焦点位置检测系统40的输出用于后述的自动聚焦装置,所以以下将多点焦点位置检测系统40称为AF系统40。
AF系统40具备将多个检测光束对晶圆W表面照射的照射系统和与接受来自晶圆W表面的该多个检测光束的反射光的受光系统(均未图示)。AF40的多个检测点(检测光束的照射点)虽然省略图示,但沿着X轴方向以规定间隔配置在被检测面上。本实施方式中,配置成例如1列M行(M为检测点的总数)或2列N行(N为检测点的总数的1/2)的矩阵状。受光系统的输出被供给至主控制装置30(参照图6)。主控制装置30基于受光系统的输出来求出上述多个检测点在晶圆W表面的Z轴方向上的位置信息(面位置信息)。本实施方式中,AF系统40形成的面位置信息的检测区域(多个检测点的配置区域),如图8的(a)~图8的(c)中标注与AF系统40相同的附图标记所示,被设定于沿X轴方向延伸的带状区域。另外,AF系统40的检测区域在X轴方向的长度被设定为与设定于至少晶圆W上的一个照射区域的X轴方向上的长度同等。
主控制装置30在曝光动作之前,使晶圆W相对于AF系统40的检测区域沿Y轴及/或X轴方向适当移动,基于此时的AF系统40的输出求出晶圆W的面位置信息。主控制装置30对设定于晶圆W上的所有照射区域获取上述面位置信息,并将其结果与晶圆台26的位置信息建立关联,存储为聚焦映射信息。
如图3所示,对准系统50具备包含物镜62的物镜光学系统60、照射系统70、及受光系统80。
照射系统70具备射出多个测量光L1、L2的光源72、配置于测量光L1、L2的光路上的可动镜74、将由可动镜74反射的测量光L1、L2的一部分朝向晶圆W反射,使其余的测量光透射的半反射镜(分束器)76、配置于从半反射镜76透射(通过)了的测量光L1、L2的光路上的光束位置检测传感器78等。
光源72将不会使涂敷于晶圆W(参照图1)的抗蚀剂感光的宽带的波长的一对测量光L1、L2沿-Z方向射出。此外,图3中,测量光L2的光路相对于测量光L1的光路在纸面内侧重叠。本第一实施方式中,作为测量光L1、L2使用例如白色光。
本实施方式中,作为可动镜74而使用例如公知的电流镜。可动镜74中,用于反射测量光L1、L2的反射面可绕与X轴平行的轴线旋动(旋转)。可动镜74的旋动角度由主控制装置30(图3中未图示,参照图6)控制。而且,在后面对可动镜74的角度控制进行说明。此外,只要能够控制测量光L1、L2的反射角,也可以使用电流镜以外的光学部件(例如棱镜等)。
半反射镜76与可动镜74不同,位置(反射面的角度)被固定。由可动镜74的反射面反射的测量光L1、L2的一部分在光路被半反射镜76向-Z方向弯折后,从物镜62的中央部透射(通过)大致垂直入射至形成于晶圆W上的格子标记GM。此外,图3中,可动镜74相对于Z轴以45°的角度倾斜,来自可动镜74的测量光L1、L2的一部分被半反射镜76向与Z轴平行的方向反射。另外,图3中,在光源72和物镜62之间的测量光L1、L2的光路上仅配置有可动镜74和半反射镜76,但即使在可动镜74相对于Z轴以45°以外的角度倾斜的情况下,也能够以从物镜62射出的测量光L1、L2大致垂直入射至形成于晶圆W上的格子标记GM的方式构成照射系统70。在该情况下,也可以在光源72与物镜62之间的测量光L1、L2的光路上配置有与可动镜74、半反射镜76不同的至少另一个光学部件。从半反射镜76通过(透射)的测量光L1、L2经由透镜77入射至光束位置检测传感器78。光束位置检测传感器78具有例如PD(PhotoDetector:光探测器)阵列或者CCD(Charge Coupled Device:电荷耦合装置)等光电转换元件,其成像面配置在与晶圆W表面共轭的面上。
在此,如图2的(a)所示,以使从光源72射出的测量光L1、L2中的测量光L1照射至第一格子标记GMa上、测量光L2照射至第二格子标记GMb上的方式设定测量光L1、L2的间隔。此外,在对准系统50中,当可动镜74的反射面的角度被变更时,根据可动镜74的反射面角度,测量光L1、L2各自在格子标记GMa、GMb(晶圆W)上的入射(照射)位置沿扫描方向(Y轴方向)变化(参照图2的(a)中的白箭头)。另外,与测量光L1、L2的格子标记GM上的位置变化连动地,光束位置检测传感器78(参照图3)上的测量光L1、L2的入射位置也发生变化。光束位置检测传感器78的输出被供给到主控制装置30(图2的(a)中未图示,参照图6)。主控制装置30能够基于光束位置检测传感器78的输出而求出晶圆W上的测量光L1、L2的照射位置信息。
在此,如图1所示,对准系统50配置于比上述AF系统40靠+Y侧,因此,如图8的(a)~图8的(c)中标准与对准系统50相同的附图标记所示,对准系统50的检测区域(检测点)相对于AF系统40的检测区域配置于+Y侧。但不限于此,这些检测区域也可以在Y轴方向重复。
物镜光学系统60具备物镜62、检测器侧透镜64及格子板66。在对准系统50中,在格子标记GM位于物镜光学系统60的正下方的状态下,当测量光L1照射至第一格子标记GMa(参照图2的(a))时,基于从第一格子标记GMa产生的测量光L1的多个(与白色光所含的多个波长的光对应的多个)±1次衍射光±L3入射至物镜62。同样地,当测量光L2照射至第二格子标记GMb(参照图2的(a))时,基于从第二格子标记GMb产生的测量光L2的多个±1次衍射光±L4入射至物镜62。±1次衍射光±L3、±L4分别被物镜62弯折光路,入射至配置于物镜62上方的检测器侧透镜64。检测器侧透镜64使±1次衍射光±L3、±L4分别聚光于配置在该检测器侧透镜64上方的格子板66上。
如图4所示,在格子板66上形成有沿Y轴方向延伸的读出用衍射光栅Ga、Gb。读出用衍射光栅Ga是与格子标记GMa(参照图2的(a))对应的以β方向为周期方向的透射型衍射光栅。读出用衍射光栅Gb是与格子标记GMb(参照图2的(a))对应的以α方向为周期方向的透射型衍射光栅。此外,本实施方式中,读出用衍射光栅Ga的节距被设定为与格子标记GMa的节距实质上相同。另外,读出用衍射光栅Gb的节距被设定为与格子标记GMb的节距实质上相同。
受光系统80具备检测器84及光学系统86等,其中,光学系统86通过如后述那样基于测量光L1、L2的衍射光(±L3、±L4)彼此的干涉而将与成像于格子板66(读出用衍射光栅Ga、Gb)上的像(干涉条纹)对应的光导向检测器84。
与成像于读出用衍射光栅Ga、Gb上的像(干涉条纹)对应的光经由光学系统86所具有的反射镜86a被导向检测器84。本实施方式的对准系统50中,与作为测量光L1、L2而使用白色光相对地,光学系统86具有分光棱镜86b。来自格子板66的光经由分光棱镜86b分光成例如蓝、绿、及红各颜色。检测器84具有与上述各颜色对应独立地设置的光探测器PD1~PD3。检测器84所具有的光探测器PD1~PD3各自的输出被供给至主控制装置30(图3中未图示,参照图6)。
作为一例,从光探测器PD1~PD3各自的输出获得图5的(a)所示的波形信号(干涉信号)。主控制装置30(参照图6)从上述信号的相位通过运算求出格子标记GMa、GMb各自的位置。即,本实施方式的曝光装置10中(参照图1),通过对准系统50和主控制装置30(分别参照图6)构成用于求出形成于晶圆W的格子标记GM的位置信息的对准装置。
主控制装置30(参照图6)在使用对准系统50进行格子标记GM的位置测量时,如图3的双箭头所示,一边将格子标记GM(即晶圆W)相对于对准系统50沿Y轴方向驱动,一边通过控制可动镜74,使测量光L1、L2追随格子标记GM沿Y轴方向扫描(参照图2的(a))。由此,由于格子标记GM与格子板66沿Y轴方向相对移动,因此,通过基于测量光L1的衍射光彼此的干涉及基于测量光L2的衍射光彼此的干涉,使干涉条纹分别成像(形成)于格子板66所具有的读出用衍射光栅Ga、Gb上。成像于格子板66上的干涉条纹如上所述由检测器84检测出。检测器84的输出被供给至主控制装置30。此外,图5的(a)所示的波形基于格子标记GMa、GMb和读出用衍射光栅Ga、Gb(参照图4)的相对移动而产生,与照射至格子标记GMa、GMb上的测量光L1、L2的位置无关地产生。因此,格子标记GMa、GMb(即晶圆载台22)的移动和测量光L1、L2的扫描也可以不完全地同步(速度不严格一致)。
在此,本实施方式中,一边使格子标记GM沿Y轴方向移动一边以追随该格子标记GM的方式使测量束的照射点沿Y轴方向移动,因此,通过以下说明的方法求出格子标记GM在晶圆W上的位置的绝对值。此外,在如以往从对准系统50照射的测量束的照射点在XY平面内的位置固定的情况下,能够基于对准系统的输出(与图5的(a)相同的波形)的中心来求出格子标记GM的位置的绝对值。
主控制装置30生成与图5的(a)所示的波形(以下,称为第一波形)独立的图5的(b)所示的波形(以下,称为第二波形)。第一波形及第二波形所示的信号为通过测量束和读出用衍射光栅Ga、Gb和格子标记GM的重叠产生的信号。在此,第一波形的横轴为晶圆台26的Y坐标值,与之相对,第二波形的横轴是基于对准系统50的光束位置检测传感器78和晶圆载台位置测量系统38的输出而求出的、测量束的Y位置和晶圆台26的Y坐标值之差。即,第一波形及第二波形均在测量束在扫描方向穿过一个格子标记GM时输出的波形,横轴的选取方法互不相同。其中,第一波形示出通过由格子标记GM产生的规定次数的衍射光例如±1次衍射光彼此的干涉而成像于读出用衍射光栅Ga及Gb上的干涉条纹所得的周期信号,示出在强度一定的规定期间内(图5的(a)中底纹的范围)测量束整体位于格子标记GM内(即测量束的一部分未到达格子标记GM的端部)。
另一方面,第二波形通过从测量束的光束位置减去晶圆载台的位置而示出与格子标记GM有关的某种程度的位置及其形状。具体而言,该第二波形的包络线表示测量束与晶圆上的格子标记GM的重叠,从该包络线的起点至终点为止表示格子标记GM的概略位置和形状。此外,第二波形的包络线中的起点与终点的中间点表示格子标记GM的中央。
主控制装置30通过运算而根据第二波形的中心位置求出格子标记的大致位置(粗略位置)。作为该运算,能够使用例如第二波形的信号强度上升的边缘部分通过切片法等公知方法求出。
接着,主控制装置30从第一波形(相位)通过例如高速傅立叶转换等公知方法求出标记位置。此时,主控制装置30仅使用测量束完全位于格子标记GM内的数据(图5的(a)中底纹范围内的数据)。
图5的(c)是格子标记GM的绝对值的计算方法的概念图。图5的(c)中,在纵轴方向上短的多条线(短线)是指由第一波形假设的格子标记GM的位置,该多条短线的每一个与图5的(a)中第一波形的峰值对应。此外,图5的(c)中,代表性地记载接近后述长线的6条短线,但实际上会出现更多短线。另外,图5的(c)中,纵轴方向长的1条线(长线)是指由第二波形求出的格子标记GM的粗略位置(例如上述格子标记GM的中央位置),最接近该长线(格子标记GM的粗略位置)的短线(标记位置的后补)成为晶圆W上的格子标记GM的绝对值(在格子标记GM中央的绝对位置)。
此外,在本实施方式中,对准系统50使测量束沿Y轴方向扫描,因此,能够通过上述方法求出格子标记GM在Y轴方向的绝对值,但为了求出有关X轴方向的绝对值,例如可以使晶圆W(格子标记GM)和对准系统50沿X轴方向相对移动(后述第二实施方式也相同)。
具体而言,使测量束和格子标记GM相对地蛇行移动(进行向与X轴及Y轴交叉的方向(例如相对于X轴和Y轴成为+45°及-45°的方向)的移动),使测量束沿X轴方向扫描以检测格子标记GM的边缘部分。或者,也可以仅一次与Y轴方向同样地,以能够检测一次格子标记GM的边缘部分的方式使测量束与格子标记GM在X轴方向相对移动。此外,使测量束与格子标记GM相对地蛇行移动而沿X轴方向扫描测量束以检测格子标记GM的边缘部分的动作,例如也可以以形成于后述的第一照射区域且对准系统50最先测量的格子标记GM(第一格子标记)为对象来进行。或者,使测量束仅一次沿X轴方向扫描来检测格子标记GM的边缘部分的动作例如也可以以形成于后述的第一照射区域且对准系统50最先测量的格子标记GM(第一格子标记)为对象来进行。此外,也可以使一对格子标记GMa、GMb的周期方向不正交而是稍微错开。
接着,使用图7所示的流程图说明使用图1的曝光装置10的曝光动作。以下说明的曝光动作在主控制装置30(参照图6)的管理下进行。
主控制装置30在步骤S10中将曝光对象的晶圆W装载在晶圆载台22上(分别参照图1)。此时,晶圆载台22被定位于基座28(参照图1)上的规定装载位置。
当晶圆装载结束时,主控制装置30在下一个步骤S12中,进行AF系统40、及对准系统50的第一次的校准(校正)。本实施方式中,第一次校准如图8的(a)所示,使用晶圆载台22所具有的第一测量标记(基准标记)WFM1进行。在本实施方式的晶圆载台22中,晶圆W保持在配置于晶圆台26(参照图1)的上表面中央的晶圆保持件(未图示),第一测量标记WFM1被配置在晶圆台26的上表面的晶圆保持件外侧的区域且在+Y侧及-X侧的位置。另外,在晶圆台26的上表面的晶圆保持件外侧的区域且在-Y侧及+X侧的位置配置有进行后述的第二次校准时使用的第二测量标记WFM2。
在第一及第二测量标记WFM1、WFM2上分别形成有用于进行AF系统40的校准的基准面、及用于进行对准系统50的校准的基准标记(分别未图示)。第一及第二测量标记WFM1、WFM2的结构除了配置不同的点外实质上相同。
主控制装置30为了进行第一次校准动作而驱动晶圆载台22,将第一测量标记WFM1定位在AF系统40、及对准系统50的正下方的位置。此外,也可以在使晶圆载台22位于上述装载位置的状态下,以使第一测量标记WFM1位于AF系统40、及对准系统50的正下方的方式设定装载位置。
在本步骤S12的校准动作中,主控制装置30使用第一测量标记WFM1上的基准面进行AF系统40的校准,并且使对准系统50测量第一测量标记WFM1上的基准标记。然后,主控制装置30基于对准系统50的输出和晶圆载台位置测量系统38的输出求出对准系统50(的检测中心)的XY平面内的位置信息。用于进行对准系统50的校准的基准标记与形成于晶圆W上的格子标记GM(参照图2的(a))实质上相同。
当第一次的校准结束时,主控制装置30在下一步骤S14中开始对准测量、及面位置测量。因此,主控制装置30驱动晶圆载台22,将第一照射区域定位成位于AF系统40及对准系统50的正下方。在此,第一照射区域是指检测对象的所有照射区域中、最先进行对准测量及面位置测量的照射区域,本实施方式中,例如为排列在最-X侧的多个照射区域的中的、最+Y侧的照射区域。
在此,本实施方式中,由于AF系统40的检测区域相对于对准系统50的检测区域配置在-Y侧,因此相较于形成在照射区域内的格子标记GM先求出该照射区域的面位置信息。然后,主控制装置30基于上述面位置信息和预先针对每层分别求出的偏移值来控制晶圆台26的Z轴方向上的位置及姿势(θx方向及θz方向的倾斜),由此,使对准系统50的物镜光学系统60聚焦于检测对象的格子标记GM。本实施方式中,上述偏移值是指以对准系统50的信号强度(干涉条纹的对比)成为最大的方式调整晶圆台26的位置及姿势时所得的AF系统40的测量值。像这样,本实施方式中,使用在对准系统50进行的格子标记GM的检测之前得到的晶圆W的面位置信息,大致实时进行晶圆台26的位置及姿势的控制。此外,也可以与格子标记GM的位置测量并行地,接受来自位置测量对象的格子标记GM的光,检测晶圆W的面位置。
接着,根据图9的流程图说明在步骤S14进行的对准动作。
主控制装置30在步骤S30中,使用对准系统50(参照图1)测量形成于第一照射区域内的格子标记GM(参照图2的(a))。此外,将形成于第一照射区域内的格子标记GM也称为“第一标记”。在此,在上述步骤S10的晶圆装载时晶圆W未准确地载置于晶圆载台22上的规定设计上的位置时(包含有旋转偏移的情况),对准系统50无法检测到格子标记GM。
因此,主控制装置30在无法检测到第一照射区域内的格子标记GM的情况下(在步骤S32判定为否),前进至步骤S34,进行晶圆W的搜寻对准动作。搜寻对准动作例如使用形成于晶圆W的外周缘部的切缺部、或形成于晶圆W上的搜寻标记(均未图示)进行,主控制装置30基于该搜寻对准动作的结果控制晶圆载台22的位置(包含θz方向的旋转),返回步骤S30。在能够检测第一照射区域内的格子标记GM的情况下,前进至步骤S36。
此外,在上述步骤S32中,也可以在无法检测到晶圆W上的第一照射区域内的格子标记GM的情况下(在步骤S32判定为否),废弃该晶圆W。该情况下,主控制装置30将晶圆载台22驱动至规定的卸载位置(也可以与装载位置共用同一个位置),将晶圆W从晶圆载台22移除,返回步骤S10,在该晶圆载台22上载置另一个晶圆。
此外,在步骤S30之前,也可以使用例如对准系统50粗略地(以比步骤S14的对准测量粗的精度)测量晶圆W上的规定的(例如任意的数处)照射区域内的格子标记GM或上述搜寻标记的位置(称为“事先测量步骤”)。通过该事先处理,能够更高精度地掌握装载于晶圆载台22的晶圆W的位置信息,能够抑制在上述步骤S32中无法检测晶圆W上的第一照射区域内的格子标记GM的事态。此外,在该事先测量步骤的格子标记GM或搜寻标记也可以包含于上述“第一标记”。
在步骤S36中,主控制装置30基于对准系统50的输出,使用上述方法(参照图5的(a)~图5的(c))求出格子标记GM的位置的绝对值。主控制装置30基于该格子标记GM的位置信息和根据上述校准动作(参照步骤S12)求出的对准系统50的位置信息,求出从对准系统50照射的测量束的X轴方向上的中心与格子标记GM的X轴方向上的中心之间的偏移量。
在此,测量束的X轴方向上的中心与格子标记GM的X轴方向上的中心之间的“偏移量”优选作为格子标记GM的-Y方向上的端部的“偏移量”来求出,但也可以在格子标记GM的Y轴方向上的任意位置来求出。例如,也可以作为格子标记GM的Y轴方向上的中央附近的“偏移量”来求出。另外,测量束的X轴方向上的中心与格子标记GM的X轴方向上的中心的“偏移量”也可以考虑从格子标记GM的+Y方向的端部(即,测量束临近格子标记GM的起点)的轨迹。
接着,主控制装置30在步骤S38中判定在步骤S36中求出的结果(偏移量)是否大于规定容许值。通过该判定,若偏移量为容许值以上(在步骤S38判定为否),则前进至步骤S40。与之相对,若偏移量低于容许值(在步骤S38判定为是),则前进至步骤S42。
在步骤S42中,主控制装置30根据在步骤S36求出的偏移量,如图10所示,使晶圆载台22和从对准系统50照射的测量束在晶圆W上的照射点沿X轴方向相对移动,由此一边修正测量束的在格子标记GM上的照射点的位置,一边进行第二个检测对象的格子标记GM的位置测量。此外,第二个以后的检测对象的多个格子标记GM中的至少一个在本实施方式中与“第二标记”对应。此外,图10中的格子标记GM实际上使用上述图2的(a)所示的格子标记GM,但也可以使用与X轴和Y轴正交的图10所示的格子标记GM。
修正该晶圆载台22的X位置的控制是为了使从对准系统50射出的测量束与第二个以后的检测对象的格子标记GM的中心一致而进行的,因此,以下称为追踪控制。在此,第二个检测对象的格子标记GM可以形成于第一照射区域内,也可以形成于其它照射区域内。另外,主控制装置30也可以根据在上述步骤S36中求出的偏移量,推定第二个以后的检测对象的格子标记GM的中心位置。
此外,图10中,描绘了以通过测量束相对于晶圆W沿-X方向及-Y方向、接着沿+X方向及-Y方向移动而使测量束相对于晶圆W蛇行移动的方式进行扫描,但在本实施方式中,实际上晶圆载台22一边相对于测量束(对准系统50)沿+X方向或-X方向微量移动,一边沿+Y方向移动。此外,由于只要晶圆载台22相对于测量束(对准系统50)沿X轴方向移动即可,所以可以构成为使对准系统5能够沿X轴方向移动,测量束相对于沿Y轴方向移动的晶圆W沿+X方向或-X方向微量驱动,也可以使晶圆W和测量束(对准系统50)两者适当地沿+X方向或-X方向微量驱动。
通过将晶圆载台22沿+Y方向驱动,形成于第一行(最靠-X侧的行)所含的多个照射区域的格子标记GM的位置测量结束时,主控制装置30如图8的(b)的箭头所示,使晶圆载台22相对于对准系统50沿-X方向移动一个照射区域量,并且使晶圆载台22沿-Y方向移动(在Y轴方向使移动方向反转),由此,进行分别形成于第二行所含的多个照射区域的格子标记GM(参照图2的(a))的位置测量。以下,通过适当切换晶圆载台22的-X方向上的移动、和向+Y或-Y方向上的移动,进行所有检测对象的格子标记GM的位置测量。此外,向X轴方向及Y轴方向的移动次数能够根据设定于晶圆上的照射区域的数量及配置适当地变更。
在此,由于通过检测结果的平均化(所谓移动平均)能够降低装置振动的影响,因此,优选为格子标记的检测时间更长。与之相对,本实施方式中,由于一边使晶圆W相对于对准系统50(更详细而言,对准系统50所具有的读出用衍射光栅Ga、Gb(参照图4))移动一边进行格子标记GM的检测,因此难以较长地确保检测时间。因此,在将晶圆载台22沿Y轴方向驱动并进行一列所含的多个格子标记的位置测量时,主控制装置30以如下的方式控制晶圆载台22的速度。
主控制装置30使第一照射区域内的格子标记GM(用于求出上述位置偏移量的格子标记GM)的测量速度(晶圆载台22的移动速度及测量束的扫描速度)与之后的格子标记GM的测量速度相比更慢。例如,主控制装置30进行在测量第一照射区域内的格子标记GM(相当于第一标记)后使晶圆载台22的移动速度增加的控制。更具体而言,一边使晶圆载台22以第一速度移动一边测量第一照射区域内的格子标记GM后,使从+Y方向依序排列的检测对象的格子标记GM(相当于第二标记)的测量速度逐渐加快。此外,也可以在一边使晶圆载台22以第一速度移动一边测量第一照射区域内的格子标记GM(第一标记)后,使晶圆载台22的移动速度增加至第二速度为止,测量之后的格子标记GM(第二标记)。由此,能够较长地确保用于求出上述位置偏移量的格子标记GM的检测时间,能够更准确地求出上述位置偏移量,同时能够缩短晶圆载台22移动的距离,因此,能够缩短测量时间。此外,并不限于此,例如也可以使进行第一行照射区域所含的检测对象的格子标记GM的位置测量时的测量速度比进行第二行以后的格子标记GM的位置测量时的测量速度慢。
另外,在进行在各行内排列的多个格子标记GM的位置测量时,也可以使测量顺序最后的格子标记GM(或者包含最后的格子标记GM在内的几个格子标记GM)的测量速度比之前的格子标记GM的测量速度慢。本实施方式中,如上所述,由于在格子标记GM的位置测量时切换晶圆载台22向+Y方向的移动和向-Y方向的移动,因此在该切换时需要使晶圆载台22在Y轴方向上减速。随之,通过使在各列的测量顺序为最后的格子标记GM的测量速度变慢,能够提高该格子标记GM的测量精度,同时能够缩短晶圆载台22移动的距离,因此,能够缩短测量时间。
主控制装置30在形成于最后一列(本实施方式中最靠+X侧的行)所含的最终照射区域(在列的数目为奇数的情况下为最靠-Y侧的照射区域,在列的数目为偶数的情况下为最靠+Y侧的照射区域)的格子标记GM的位置测量结束时(在步骤S44判定为否),进入图7的步骤S16,进行第二次的校准。在第二次的校准中,主控制装置30适当驱动晶圆载台22,如图8的(c)所示,使第二测量标记WFM2位于AF系统40及对准系统50的正下方。之后,使用第二测量标记WFM2进行多点焦点位置测量系统40及对准系统50的第二次的校准。
此外,在上述说明中,在步骤S36中(参照图9),使用第一照射区域的格子标记GM(即一个格子标记GM)求出偏移量,基于其结果适当修正晶圆载台22的X位置(参照步骤S42及图10),但不限于此,也可以测量包含第一照射区域在内的多个照射区域的格子标记GM(或者第一照射区域内的多个格子标记GM)的位置,基于该结果来修正晶圆载台22的X位置。该情况下,例如可以测量多个格子标记,基于该结果通过运算将晶圆载台22的移动轨迹作为函数(例如1次函数)来求出。
另外,第一照射区域的位置能够适当变更,并非必须为最靠-X侧且+Y侧的照射区域(第一测量标记WFM1附近的照射区域),也可以使用例如更靠晶圆W内侧的照射区域的格子标记。另外,例如也可以使用第一照射区域内的格子标记GM周围(例如规定半径r内所含的)的多个格子标记通过运算将晶圆载台22的移动轨迹作为函数(例如1次函数)来求出。
在此,在进行上述晶圆W上的格子标记GM的位置测量时,主控制装置30使对准系统50的可动镜74与晶圆载台22的向+Y或-Y方向的驱动连动地往返多次(根据一列所含的检测对象标记的数)。此时,如图11所示,主控制装置30进行使可动镜74的驱动波形成为锯齿状的控制。具体而言,图11中,在t
在第二次校准结束时,主控制装置30前进至步骤S18,基于在步骤S14取得的AF系统40的输出求出各照射区域的面位置的分布信息,并且基于对准系统50的测量结果通过例如增强型全晶圆调准(EGA)等方法求出各照射区域的排列坐标。主控制装置30根据上述面位置信息及EGA运算的结果,一边驱动晶圆载台22一边对各照射区域进行步进扫描方式的曝光动作。该步进扫描方式的曝光动作与以往进行的动作相同,因此省略其详细说明。
根据以上说明的本第一实施方式的曝光装置10,由于根据对准系统50的测量束相对于最初的格子标记GM的照射位置的偏移,在之后的格子标记GM测量时修正晶圆载台22的位置,因此能够可靠地求出检测对象的格子标记GM的位置信息。
另外,本实施方式的对准系统50,一边使晶圆W(晶圆载台22)沿Y轴方向移动,一边使测量光L1、L2相对于格子标记GM(分别参照图3)沿Y轴方向扫描,因此,能够与晶圆载台22向曝光开始位置的移动动作并行地进行该格子标记GM的位置测量动作,该晶圆载台22向曝光开始位置的移动动作例如在将晶圆W装载于晶圆载台22上之后进行。该情况下,可以在晶圆载台22的移动路径上预先配置对准系统50。由此,能够缩短对准测量时间,提高整体的产率。
另外,本实施方式的对准系统50以追随沿扫描方向移动的晶圆W(格子标记GM)的方式扫描测量光,因此,能够进行长时间的测量。因此,由于能够取得所谓输出的移动平均,所以能够降低装置振动的影响。另外,假设在作为对准系统的受光系统而使用图像传感器(例如CCD等)检测线与间隔(line and space)状的标记的情况下,若追随沿扫描方向移动的晶圆W扫描测量光,则无法检测与扫描方向完全平行的线以外的像(像会变形)。与之相对,在本实施方式中,通过使来自格子标记GM的衍射光干涉来进行该格子标记GM的位置测量,因此,能够可靠地进行标记检测。
另外,本实施方式的对准系统50中,作为检测器84,与白色光即测量光L1、L2对应地具有例如三个光探测器PD1~PD3(分别为蓝色光、绿色光、红色光用)。因此,例如在晶圆对准前使用白色光检测形成于晶圆W上的重叠标记(未图标),预先求出干涉条纹的对比度最高的光的颜色,由此能够决定上述例如三个光探测器PD1~PD3的中任一个的输出最适用于晶圆对准。
(第二实施方式)
接着,说明第二实施方式的曝光装置。本第二实施方式的曝光装置与上述第一实施方式的曝光装置10仅在晶圆载台上的测量标记的位置不同,因此仅说明以下不同点,关于具有与第一实施方式相同的结构及功能的要素,使用与第一实施方式相同的附图标记,省略其说明。
上述第一实施方式中,如图8的(a)等所示,在晶圆载台22上配置有例如两个测量标记WFM1、WFM2,与之相对,如图12的(a)~图12的(d)所示,在本第二实施方式的晶圆载台122,在未图示的晶圆保持件(图12的(a)~图12的(d)中与晶圆W重叠)的+Y侧配置有一个测量标记。以下,使用图13所示的流程图说明本第二实施方式的曝光动作。
主控制装置30在步骤S50中将晶圆W装载于晶圆载台122上(参照图12的(a))。在上述第一实施方式中,在晶圆W装载后立即进行校准动作,与之相对,本第二实施方式中,在晶圆W装载后,前进至步骤S52,将晶圆载台22在XY平面内适当驱动,进行作为检测对象的所有格子标记GM的位置测量。
在本第二实施方式中的格子标记GM的位置测量动作中,也进行与第一实施方式相同的追踪处理。即,如表示图13的步骤S52的具体例的图14的流程图所示,在步骤S70中进行第一照射的格子标记GM(相当于第一标记)的位置测量,其结果为,在无法检测格子标记GM的情况下(在步骤S72判定为否),前进至步骤S74,进行搜寻对准动作,返回步骤S70重新进行第一照射的格子标记GM的位置测量。与之相对,在能够进行第一照射的格子标记GM的位置测量的情况下(在步骤S72判定为是),前进至步骤S76,求出测量束的格子标记GM上的位置偏移量。另外,如果在步骤S76求出的位置偏移量低于容许值(在步骤S78判定为是),则前进至图13的步骤S54。与之相对,在位置偏移量为容许值以上的情况下(在步骤S78判定为否),前进至步骤S80,重新进行第一照射的格子标记GM的位置测量。
返回图13,在步骤S54中,与第一实施方式同样地,如图10所示,使测量束和晶圆W沿X轴方向(抵消上述位置偏移的方向)相对移动,并且将晶圆W沿Y轴方向驱动。对准系统50(参照图3)一边以追随晶圆W向Y轴方向移动的方式将测量束照射至晶圆W上,一边进行作为检测对象的格子标记GM的位置测量。另外,也并行进行使用AF系统40的晶圆W的面位置测量(聚焦映射动作)。
在下一步骤S56中,主控制装置30与上述格子标记GM的位置测量动作并行地基于晶圆载台位置测量系统38的输出判断对准系统50的检测区域和测量标记WFM的XY平面内的位置是否一致。当其结果为对准系统50的检测区域和测量标记WFM的XY平面内的位置一致时,前进至步骤S58,在格子标记GM的位置测量动作及聚焦映射动作中断后,在下一步骤S60中,进行AF系统40及对准系统50的校准动作。
然后,在校准动作结束时,前进至步骤S62,主控制装置30再次开始格子标记GM的位置测量动作及聚焦映射动作。然后,当最终照射的格子标记GM的位置测量结束时(在步骤S64判定为是),在步骤S66中,开始步进扫描方式的曝光动作。在以上说明的第二实施方式,也能够获得与上述第一实施方式相同的效果。
此外,上述第一实施方式及第二实施方式的包含追踪控制的晶圆载台22及其控制方法能够适当变更。例如,上述第一实施方式及第二实施方式中,在无法检测第一照射区域的格子标记GM的情况下(在步骤S32、S72中判定为否),进行搜寻对准,但不限于此,也可以在晶圆装载后(步骤S10和步骤S14间的任意期间、或者步骤S50和步骤S54间的任意期间)执行搜寻对准。另外,上述第一实施方式及第二实施方式中,以执行上述的事先测量步骤。
另外,上述第一及第二实施方式中,如图2的(a)所示,照射与格子标记GMa、GMb分别对应的测量光L1、L2,但并不限于此,例如图2的(b)所示,也可以将沿X轴方向延伸的(宽广的)单一测量光L1照射至格子标记GMa、GMb。
另外,上述第一及第二实施方式中,如图2的(a)所示,格子标记GMa、GMb沿着X轴方向排列,但并不限于此,例如图2的(c)所示,格子标记GMa、GMb也可以沿着Y轴方向排列。该情况下,通过使单一测量光L1按照格子标记GMa、GMb的顺序(或相反)进行扫描,能够求出格子标记GM在XY平面内的位置。
另外,上述第一实施方式及第二实施方式中,从对准系统50射出的测量光L1、L2垂直入射至格子标记GM,但不限于此,也可以成规定角度(即倾斜)入射至格子标记GM。例如图15的(a)所示,在以入射角θ
在此,在上述第一实施方式及第二实施方式中,由于通过使来自格子标记GM的一对衍射光干涉而进行格子标记GM的位置测量,因此在使用图15的(a)所示的斜入射方式的情况下,也如图15的(b)所示,为了进行格子标记GM(参照图15的(a))的正交二轴方向的位置测量,所以合计从四个方向将测量光L向格子标记GM照射。在此,图15的(b)是表示在物镜62的光瞳面的像(光的方向)的图。如上述,本实施方式的格子标记GM(参照图2)以沿X轴及Y轴呈例如45°的方向的α或β方向为周期方向,因此,测量光L的入射方向及衍射光L’的出射方向也同样地成为α或β方向。此外,测量对象的格子标记的周期方向也可以为与X轴及Y轴平行的方向,该情况下,如图15的(c)所示,使测量光L入射与X轴及Y轴平行的方向。该情况下,衍射光L’沿与X轴及Y轴平行的方向射出。
另外,上述第一实施方式的对准系统50的受光系统80中,通过分光棱镜86b将白色光分光,但不限于此,如图16所示的检测系统380,也可以使用多个分光滤镜386将白色光朝向对应各色(例如,蓝、绿、黄、红、红外光)配置的光探测器PD1~PD5分光。
另外,照明光IL不限于ArF准分子激光(波长193nm),也可以为KrF准分子激光(波长248nm)等紫外光、或者F
另外,上述各实施方式的曝光装置的投影光学系统不仅为缩小系统,也可以为等倍及放大系统的任一系统,投影光学系统16b不仅为折射系统,也可以为反射系统及反射折射系统的任一系统,其投影像可以为倒立像及正立像的任一方。另外,也可以将在上述第一实施方式和第二实施方式中分别详述的结构任意组合实施。
另外,上述各实施方式中,使用在透光性的基板上形成有规定的遮光图案(或相位图案、减光图案)的光透射型光罩(标线片),但也可以替代此标线片,例如美国专利第6778257号说明书所公开的那样,使用基于应曝光的图案的电子数据来形成透射图案或反射图案、或者发光图案的电子光罩(也称为可变成形光罩、主动光罩、或者图像生成器,包含例如非发光型影像显示元件(空间光调制器)的一种即DMD(Digital Micro-mirrorDevice:数字微镜器件)等)。
另外,作为曝光装置,例如美国专利第8004650号说明书所公开的那样,在投影光学系统和曝光对象物体(例如晶圆)之间充满液体(例如纯水)的状态下进行曝光动作的所谓液浸曝光装置也能够应用上述各实施方式。
另外,例如美国专利申请公开第2010/0066992号说明书所公开的具备两个晶圆载台的曝光装置也能够应用上述各实施方式。
另外,例如国际公开第2001/035168号所公开,通过在晶圆W上形成干涉条纹,在晶圆W上形成线与间隔图案的曝光装置(光刻系统)也能够应用上述各实施方式。另外,将照射区域和照射区域合成的步进-拼接(step and stitch)方式的缩小投影曝光装置也能够应用上述实施方式。
另外,例如美国专利第6611316号说明书所公开的那样,经由投影光学系统将两个标线片图案在晶圆上合成,通过一次扫描曝光使晶圆上的一个照射区域几乎同时进行双重曝光的曝光装置也能够应用上述各实施方式。
另外,上述实施方式中,应形成图案的物体(被能量束照射的曝光对象的物体)不限于晶圆,也可以为玻璃板、陶瓷基板、薄膜部件、或者光罩基板等其它物体。
另外,作为曝光装置的用途,不限于半导体制造用曝光装置,例如也可以广泛适用于将液晶显示元件图案转印于方型玻璃板上的液晶用曝光装置、或用于制造有机EL、薄膜磁头、摄像元件(CCD等)、微型机械或者DNA芯片等的曝光装置。另外,不仅半导体元件等微器件,为了制造在光曝光装置、EUV曝光装置、X线曝光装置、或者电子束曝光装置等使用的标线片或光罩,将电路图案转印于玻璃基板或硅晶圆等的曝光装置也能够应用上述各实施方式。
半导体元件等电子器件是经过如下的这些步骤制造出来的,这些步骤包括:进行器件的功能、性能设计的步骤;制作基于该设计步骤的光罩的步骤;利用硅材料制作晶圆的步骤;通过上述的实施方式的曝光装置(图案形成装置)以及其曝光方法来将光罩(标线片)的图案转印至晶圆上的光刻步骤;使曝光了的晶圆显影的显影步骤;通过刻蚀来去除残留有抗蚀剂的部分以外的部分即露出部件的刻蚀步骤;刻蚀结束后去掉不需要的抗蚀剂的抗蚀剂除去步骤;器件组装步骤(包括切割工序、焊接工序和封装工序);以及检查步骤等。在这种情况下,由于在光刻步骤中,使用上述实施方式的曝光装置执行上述的曝光方法来在晶圆上形成器件图案,所以能够生产性良好地制造出高集成度的器件。
此外,原因上述记载中引用的与曝光装置等相关的所有公报、国际公开、美国专利申请公开书说明书及美国专利说明书的公开作为本说明书记载的一部分。
工业上的可利用性
如上述说明,本发明的移动体的控制方法适于检测设置在载置于移动体上的物体的多个标记。另外,本发明的曝光方法及曝光装置适于将物体曝光。另外,本发明的器件制造方法适于微型器件的制造。
附图标记说明
10曝光装置、14标线片载台、20晶圆载台装置、30主控制装置、40AF系统、50对准传感器、GM格子标记、W晶圆。
- 位置测量系统及位置测量方法、移动体装置、移动体驱动方法、曝光装置及曝光方法、图案形成装置、以及组件制造方法
- 测量系统、测量方法及曝光装置