应用于预制水平构件吊装时的辅助就位装置及方法
文献发布时间:2023-06-19 11:47:31
技术领域
本发明属于建筑工程领域,涉及装配式结构,具体为一种应用于预制水平构件吊装时的辅助就位装置及方法。
背景技术
装配式结构因其具有独特的技术创新和工业化生产的特点,近十年来,在建筑工程中得到普遍重视与应用,在保证施工质量的前提下,还可以节省施工时间,提高施工效率。
目前装配式结构在安装施工过程中,预制构件吊装就位时需要将预制构件精确安装到已建成结构的特定位置。在实际吊装过程中,存在以下问题:
1)装配式结构预制水平构件精确就位问题是影响装配式结构安装效率和施工质量的关键。针对预制水平构件过程中的对位问题,吊机或塔吊仅负责竖向位置的就位,水平位置对准目前采取的方法是多名工人协作手动将构件推拉至安装位置。这种人工方法对位准确性较差,导致安装过程耗时长、效率低下,不利于实现装配式结构实现快速施工安装的目标。
2)装配式结构预制水平构件精确就位问题是节约人工成本、提升施工安全性的关键。随着劳动力的逐步短缺,采用人工对位的方法需要较多的工人数量,经济成本较高。由于受到吊机吊臂、吊绳刚度不足和变形等因素的影响,吊装过程中的构件稳定性差,对位准确性难以保证。加之水平构件如楼板的安装需要工人进行高空作业,有很大的事故隐患,安全问题频发,工人在吊装过程中的安全性问题也不容忽视。
发明内容
发明目的:本发明针对以上技术问题,提供一种应用于预制水平构件(如楼板、梁等)吊装时辅助水平位置精确就位的装置,该装置可以智能化地辅助实现预制水平构件水平位置的精确就位,可以避免工人吊装时在高空环境下手扶对位,提高装配式结构的安装效率和安装精度,保障施工的安全性。
技术方案:为实现上述技术目的,本发明采用的技术方案为:
一种应用于预制水平构件吊装时的辅助就位装置,包括:
底座,所述底座上设有若干个底座固定装置,用于将所述底座临时固定在下层楼板的特定位置;
设置在所述底座上的多自由度机械臂;
端部平台,设置在所述多自由度机械臂上,所述端部平台上设有竖直杆,所述预制水平构件上设有供所述竖直杆插接的卡位;
第一摄像头,设置在所述端部平台上,用于识别预制水平构件预留卡位的位置;
第一距离传感器,设置在所述端部平台上,用于监测所述预制水平构件与所述端部平台之间的竖向距离;
端部平台位置传感器,设置在所述端部平台上,用于确定所述端部平台的空间位置和方位;
中央控制器,所述中央控制器的信号输入端与所述第一摄像头、第一距离传感器和端部平台位置传感器连接,其信号输出端与所述多自由度机械臂连接。
所述底座固定装置为通过液压或螺纹方式从底座伸出的杆件,卡住下层楼板的突起件或凹入点,若干个固定装置伸向不同的方向,将底座固定。
所述多自由度机械臂为拥有至少六个自由度的机械臂,用于调整所述端部平台的位置和方位。
所述竖直杆的底端安装在多自由度机械臂的端部平台上,通过多自由度机械臂的转动使得竖直杆在整个辅助就位过程中均保持竖直向上状态,便于插接预制构件的预留卡位。
所述端部平台位置传感器通过多向云台安装在机械臂的所述端部平台上,包括一个第二摄像头、一个第二距离传感器和一个角度传感器,其中,第二摄像头接受中央控制器的指令,通过多向云台的动作寻找并锁定绘制在下层楼板上的定位轴线,通过第二距离传感器和角度传感器的读数计算机械臂端部平台所处的空间位置和方位。
所述端部平台位置传感器46为激光雷达接收器。
所述底座带有移动装置。
所述移动装置为设置在底座底部的万向滚轮。
所述移动装置包括设置在底座1底部的行走轮或履带,还包括:
动力系统,用于驱动所述行走轮或履带行走;
底座位置和方位感知系统,用于检测所述底座的位置和方位;
转向系统,用于驱动所述行走轮或履带转向。
本发明还进一步公开了一种预制水平构件吊装辅助方法,包括以下步骤:
1)辅助装置就位
所述辅助装置包括:底座;设置在所述底座上的多自由度机械臂;端部平台,设置在所述多自由度机械臂上,所述端部平台上设有竖直杆,所述预制水平构件上设有供所述竖直杆插接的插接部;第一摄像头,用于识别所述预制水平构件与竖直杆的相对位置;第一距离传感器,用于监测所述预制水平构件与所述端部平台之间的竖向距离;端部平台位置传感器,用于确定所述端部平台的空间位置和方位;
中央控制器,所述中央控制器的信号输入端与所述第一摄像头、第一距离传感器和端部平台位置传感器连接,其信号输出端与所述多自由度机械臂连接;
操作工人推动应用于预制水平构件吊装时的辅助就位装置,或者装置接受中央控制器的指令自动行走,至其工作位置;
2)辅助装置安装固定:
下层楼板提前预留突起件或凹入点,结合底座上的底座固定装置将此装置固定;
3)确定机械臂精确位置:
端部平台位置传感器通过识别建筑轴线或辅助轴线,或者通过接收工地局域的激光雷达信号,确定机械臂端部平台所处的空间位置和方位;
4)辅助预制水平构件精确就位的整体过程:
吊车或塔吊将构件送至安装位置附近,并下落一定距离至辅助装置上方,首先,第一机械臂A上的第一摄像头捕捉预制水平构件预留第一卡位
随后,第二机械臂B竖直杆上的第一摄像头捕捉此时预制水平构件预留第二卡位
通过机械臂多自由度运动使得竖直杆在整个辅助就位过程中均保持竖直状态,便于插入预制水平构件的预留卡位内;
根据预制水平构件的预定安装位置并结合第一机械臂A端部平台和第二机械臂B端部平台当前的空间位置和方位,中央控制器对第一机械臂A和第二机械臂B关节的转动做出指令,第一机械臂A和第二机械臂B上的竖直杆通过卡位推动将预制水平构件送入预定安装位置,即预制水平构件预留第一卡位
然后,塔吊或吊车放下预制构件,使其下落至预定位置并完成就位搁置,各机械臂端部平台处的位置传感器在整个就位过程中不断向中央控制器传输监测到的端部平台空间位置,实时校核端部平台的空间位置和方位,防止预制水平构件就位偏差;
5)辅助装置拆除:
完成对预制水平构件的辅助就位任务后,将各机械臂缩回至原来位置,拆除对装置的固定,利用安装在底座下部的移动装置将装置移动至下一预制水平构件安装位置附近,等待下一辅助就位任务。
有益效果:
1)通过机械臂端部平台上的竖直杆将预制水平构件送入安装位置,实现预制水平构件吊装时的精确就位。在下层楼面板上,预制水平构件安装位置下方布置本发明设计的装置辅助装置,通过传感器确定装置机械臂端部平台的空间位置和方位,当吊机或塔吊将预制构件起吊到预定安装位置附近后,由端部平台上设置的摄像头和距离传感器捕捉预制构件上预留卡位的位置,由中央控制器控制机械臂关节的转动将竖直杆插入预制构件预留卡位内,两个机械臂协同,将预制构件送入所需的水平方位,随后吊机将构件逐渐下方至安装位置并完成搁置,实现预制构件的精确就位。
2)替代工人对预制构件的手工对位,避免高空作业,节省人工成本,提高装配式结构的施工安装效率。由于受到吊机吊臂、吊绳刚度不足和变形等因素的影响,预制构件在实际吊装时很难精确就位。精确就位需要安装工人通过现场多人协作、手动将预制构件扶正,耗时长且效率低下。再加上水平构件的安装需要工人在高空环境下进行操作,安全隐患较多。在本发明中,预制构件的精确就位由辅助装置完成,中央控制器通过控制机械臂关节的转动控制竖直杆的移动,利用竖直杆将预制构件送入安装水平位置,可实现自动化操作,提高了装配式结构预制构件的安装效率,节省人工成本,避免安全事故的发生。
3)装置便于安装拆卸,可适应整个工程项目全部多种类型预制水平构件的安装,实现装置的重复使用。本发明的装置利用下层楼板预留的突起件或凹入点临时固定,便于安装和拆卸。底座下安装有移动装置,可通过操作工人推动或接受中央控制器指令自动行走,实现此装置的重复利用,在一个构件吊装结束后,移至下一目标位置等候吊装。针对不同尺寸的构件,可以通过调整机械臂在底座的位置或通过机械臂关节的转动来适应不同尺寸的预制水平构件。
附图说明
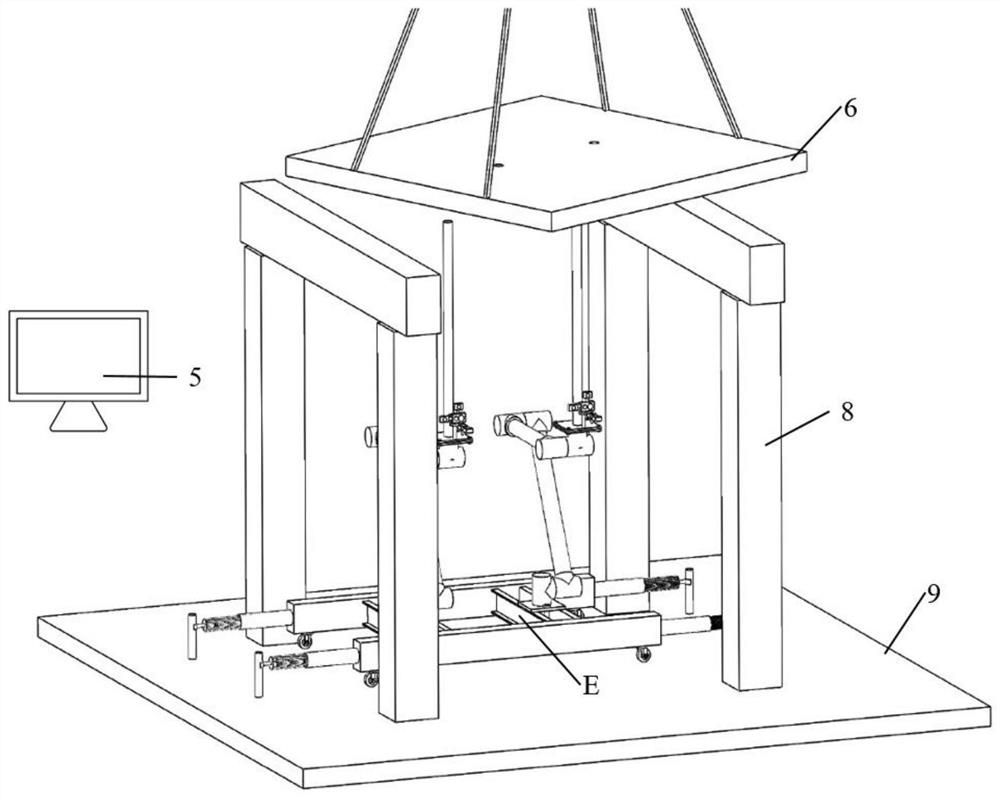
图1为应用于预制水平构件吊装时的辅助就位装置施工使用现场示意图:
其中,E、应用于预制水平构件吊装时的辅助就位装置,5、中央控制器,6、待安装预制水平构件,8、已安装竖向构件,9、下层楼板;
图2为应用于预制水平构件吊装时的辅助就位装置组成的示意图:
其中,1、底座,2、底座固定装置,3、移动装置,4、机械臂;
图3为机械臂示意图:
其中,41、端部平台,42、竖直杆,43、第一摄像头,44、第一距离传感器,45、端部平台位置传感器;
图4为机械臂位置传感器示意图;
其中,451、多向云台,452、第二摄像头,453、第二距离传感器,454、角度传感器;
图5(a)~图5(e)为装置辅助构件就位过程图;
图中: A、第一机械臂,B、第二机械臂,a、预制水平构件预留第一卡位,b、预制水平构件预留第二卡位,7、安装位置。
具体实施方式
下面结合附图对本发明的技术方案做进一步的说明。
如图2所示,一种预制水平构件吊装时辅助水平位置精确就位的装置,
该装置包括一个底座1,两个固定在底座1上的多自由度机械臂4,以及中央控制器5。
底座1带有移动装置3,可为万向滚轮,也可包括设置在底座1底部的轮子或履带行走系统、动力系统、底座位置和方位感知系统、自动驾驶系统和转向系统,用于在构件吊装结束后手动或自动移至下一安装地点,实现装置的重复使用。
底座1包含若干个底座固定装置2,用于将所述底座1临时固定在下层楼板的特定位置。
底座固定装置2为通过液压或螺纹方式从底座伸出的杆件,卡住下层楼板的突起件或凹入点,若干个固定装置伸向不同的方向,将底座1固定。
中央控制器5的信号输入端与所述第一摄像头43、第一距离传感器44和端部平台位置传感器45连接,其信号输出端与所述多自由度机械臂4连接。
如图3所示,多自由度机械臂4包含,一个端部平台41,一个竖直杆42,一个摄像头43、一个距离传感器44和一个端部平台位置传感器45。
多自由度机械臂4通过其上多个关节的旋转调节端部平台41的位置和方位;
端部平台41上安装竖直杆42、第一摄像头43、第一距离传感器44以及端部平台位置传感器45;其中,所述竖直杆42安装在多自由度机械臂4端部平台41处,用于插入预制水平构件预留卡位并将水平构件送入所需的水平方位;摄像头43设置在多自由度机械臂4的端部平台41处,用于识别预制水平构件预留卡位的位置;距离传感器44,设置在多自由度机械臂4的端部平台41处,用于监测预制水平构件与端部平台41之间的竖直距离;端部平台位置传感器45设置于多自由度机械臂4端部平台41处,用于确定端部平台41的空间位置和方位。
竖直杆42在整个辅助就位过程中通过多自由度机械臂4各个关节的转动均保持竖直状态,便于插入预制水平构件的预留卡位内。
端部平台位置传感器45设置于多自由度机械臂4端部平台41处,通过识别建筑轴线或辅助轴线,或者通过接收工地局域的激光雷达信号,以确定端部平台41的空间位置和方位。
如图4所示,端部平台位置传感器45通过多向云台451安装在底座1上,包括一个第二摄像头452、一个第二距离传感器453和一个角度传感器454,其中,第二摄像头452接受中央控制器5的指令,通过多向云台451的动作寻找并锁定绘制在下层楼板上的定位轴线,通过第二距离传感器453和角度传感器454的读数计算多自由度机械臂4端部平台41所处的空间位置和方位。
本发明的技术方案包括以下特征:
1)预制水平构件吊装水平位置准确对位的实现。当所述的应用于预制水平构件吊装就位辅助装置移动并安装在构件预定安装位置下方时,根据吊装构件尺寸大小调整两个机械臂4的位置。利用端部平台位置传感器45识别建筑轴线或辅助轴线,或者通过接收工地局域的激光雷达信号,由中央控制器5精确确定各个机械臂4端部平台41所处的空间位置和方位。由安装在机械臂4端部平台41处的摄像头44捕捉预制水平构件预留卡位的位置,并通过距离传感器44测量端部平台41与构件的竖直距离,中央控制器5利用采集到的图像和数据分析计算出将机械臂4上的竖直杆42插入预留卡位时所需的各关节的转动角度,按照此转动角度调整机械臂4将竖直杆42插入预留卡位。根据构件的预定安装位置和当前端部平台41所处的位置,中央控制器5对机械臂4各关节的转动做出指令,竖直杆42将预制构件送入预定安装位置即构件预留卡位所处的预定空间位置。两个机械臂4协同,可以将所吊装的预制水平构件送入所需的水平方位,实现预制水平构件水平位置的完全精确就位。
2)自动化装置替代人工的实现。本发明提出的辅助装置可在预制水平构件初步就位后,自动实现水平位置的精确就位,有效解决人工对位带来的准确性差、效率低以及安全性问题,提高装配式结构施工安装效率,降低人工成本。
3)装置方便安装拆卸、可重复使用的实现。所述的预制构件吊装就位辅助装置,从底座1通过液压或螺纹等方式伸出底座固定装置2,可利用下层楼板上预留的突起件或凹入点将装置临时固定,方便安装和拆卸。装置底部有移动装置3,在完成一个构件吊装对位的任务后,操作工人可推动此装置或装置接受中央控制器5的指令自动行走至下一构件安装地点等候吊装。机械臂4在底座1上的位置可以调整,并且机械臂4可通过各个关节41的转动调整其空间位置和方位,从而适应不同尺寸预制构件的安装。
本发明的设计思想体现在以下几个方面:
1)预制水平构件吊装水平位置准确就位。在装配式结构施工工程中,由于受到吊机吊臂、吊绳刚度不足和变形等因素的影响,预制水平构件很难在吊装时实现水平位置的精确就位,通常需要人工推拉构件操作,安装效率低下。结合机械臂4可实现自动控制、转动灵活、行程范围大以及位移误差小等特点,提出一种预制水平构件(如楼板、梁等)智能拼装辅助装置。通过辅助装置的传感器系统确定各个机械臂4端部平台41的空间位置和方位,当吊机或塔吊将预制构件起吊到预定安装位置上方附近时,由机械臂4端部平台41上设置的摄像头43和距离传感器44捕捉预制构件上预留卡位的位置,由中央控制器5控制机械臂4各关节的转动将竖直杆42插入预制构件预留卡位内,两个机械臂4协同,将预制构件送入所需的水平方位,随后吊机将构件逐渐下方至安装位置并完成就位搁置,实现预制构件的精确就位,利用自动化的装置提升安装效率。
2)装置方便安装拆卸、可重复利用。为提升装配式结构预制水平构件的安装速度,并节约设备成本,每个构件安装完成后需要辅助装置方便拆卸,在下一构件吊装对位前能够提前移动至下一安装地点,完成装置固定后等待对位任务,实现一台装置的重复利用。所以在每个底座1边角处有底座固定装置2,便于利用楼板预留的突起件或凹入点实现装置的固定,且底座1下部的移动装置3可使装置通过人工或者自动行走较为轻松地移至下一安装地点。为适应同一建筑结构内不同尺寸的预制构件,可调整机械臂4在底座上的位置或通过机械臂4各关节的转动,来扩大此装置的适用预制构件尺寸范围。
以下以本发明的一个可实施例为例,说明本发明的具体实施方式。
如图1和图5(a)~图5(e)所示,本发明所提出的预制水平构件吊装就位辅助装置,将移动并安装在预制构件安装位置下方附近。在本说明书中,装置有两个机械臂,分别是第一机械臂A和第二机械臂B,对应的预制水平构件预留卡位分别是第一卡位
1)辅助装置就位:
操作工人推动预制水平构件吊装就位辅助装置,或者装置接受中央控制器5的指令自动行走,至其工作位置;
2)辅助装置安装固定:
下层楼板提前预留突起件或凹入点,结合底座1上的底座固定装置2将此装置固定;
3)确定机械臂精确位置:
端部平台位置传感器45通过识别建筑轴线或辅助轴线,或者通过接收工地局域的激光雷达信号,确定机械臂4端部平台41所处的空间位置和方位;
4)辅助预制水平构件精确就位的整体过程:
吊车或塔吊将构件6送至安装位置附近,并下落一定距离至辅助装置上方。首先,第一机械臂A 竖直杆上的第一摄像头捕捉预制水平构件6预留第一卡位
5)辅助装置拆除:
完成对预制水平构件6的辅助就位任务后,将各机械臂4缩回至原来位置,拆除对装置的固定,利用安装在底座1下部的移动装置3将装置移动至下一水平构件安装位置附近,等待下一辅助就位任务。
- 应用于预制水平构件吊装时的辅助就位装置及方法
- 一种用于预制结构构件吊装的高精度就位辅助装置和方法