一种基于下肢外骨骼的人体辅助方法
文献发布时间:2023-06-19 11:49:09
技术领域
本发明属于外骨骼辅助设备领域,尤其涉及一种基于下肢外骨骼的人体辅助方法。
背景技术
外骨骼是指围绕在身体之外的骨骼且能够起到保护内部气管,或者辅助运动的作用,外骨骼机器人融合了传感技术、控制理论、信心传递、机电系统控制等,为穿戴者提供辅助的机械机构综合技术;下肢外骨骼机器人就是一种能够辅助人体行走的机器人,能够提供助行、减压、保护等功能;外骨骼机器人应用广泛,无论是在民用、商用还是军事应用都蕴含着无限的潜质。
现有的下肢外骨骼机器人设计成本高,并且不能完全模仿人的走路动作,尤其是对于通过采集运动信息来获取外骨骼机器人的运动信息过程,信息采集难度较大,采集数据准确性差,受人为影响比较大,造成信号采集误差较大;并且外骨骼机器人的结构设计不合理、驱动系统不适当,容易对穿戴者造成伤害;并且现有的大多数下肢外骨骼机器人为刚性结构,调节不便,影响穿戴舒适度,在一定程度上会限制穿戴者的运动;影响穿戴者使用。刚性外骨骼一定成度影响了穿戴者的恢复训练速度,恢复效率低,辅助效果较差。
中国专利申请号201920381024.4公开了一种外骨骼机器人,包括外骨骼机器人本体和传感器;外骨骼机器人本体包括上部支撑结构、髋部杆件、大腿杆件、小腿杆件、足部构件、髋关节、膝关节、踝关节;传感器包括检测足底压力的薄膜应变片传感器、检测关节角度的编码器、检测关节处力/力矩的力传感器、检测运动速度/加速度的姿态传感器、检测肌肉张力的电容式传感器,还设有连接绑带,连接绑带上固定与人体皮肤非接触的电容式传感器,电容式传感器包括至少一个电极贴片。上述技术方案采集数据准确性差,受人为影响比较大,造成信号采集误差较大。
中国专利申请号201710759274.2公开了一种外骨骼机器人,该外骨骼机器人包括髋关节部件、大腿支撑部件、膝关节部件、小腿支撑部件及脚部支撑部件。本发明通过采用外骨骼机器人的髋关节驱动组件包括髋关节摩擦轮以摩擦驱动髋关节传动组件,和/或膝关节驱动组件包括膝关节摩擦轮以摩擦驱动膝关节传动组件,进而带动关节运动的方式。上述技术方案,刚性结构,调节不便,影响穿戴舒适度,在一定程度上会限制穿戴者的运动;影响穿戴者使用。
发明内容
针对现有技术不足,本发明的目的在于提供了一种基于下肢外骨骼的人体辅助方法,通过设置的大腿杆和小腿杆完成人体运动模拟方式,同时结合设置的弹性组件,两者共同作用,通过弹性组件改变下蹲或者弹跳中的支撑力,运动恢复之后时增加助力,通过可变刚性支撑,增加使用舒适度,减小对穿戴者运动幅度的束缚,提升穿戴者恢复效率;通过对足底压力数据的分析处理,对足底压力角度进行纠正,对于压力值提取更加精确,减小行为误差;对足底压力进行区域划分,增加足底压力变化采集数据的准确性;增加准确性减小数据采集的误差,及时得到信息反馈,进一步提升外骨骼机器人对穿戴者的辅助监测的准确性。
本发明提供如下技术方案:
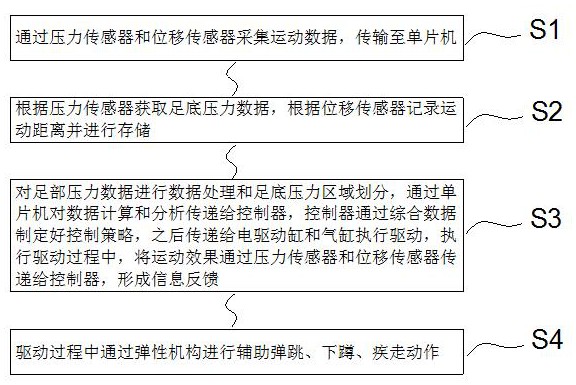
一种基于下肢外骨骼的人体辅助方法;包括以下步骤:S1:通过压力传感器和位移传感器采集运动数据,传输至单片机;
S2:根据压力传感器获取足底压力数据;根据位移传感器记录运动的距离并进行存储;
S3:对足部压力数据进行进行数据处理和足底压力区域划分,通过单片机计算和分析传递给控制器,控制器通过综合数据制定好相应的控制策略,之后传递给电驱动缸和气缸执行驱动,在执行驱动的过程中,将运动效果通过压力传感器和位移传感器传递给控制器,形成运动信息反馈;
S4:驱动过程中通过弹性机构进行辅助弹跳、下蹲、疾走动作。
优选的,步骤S3中,足部压力数据处理采用一种提取压力散点的方法包括以下步骤,a,散点凸包选取;b,基于斜率的点集分区;c,基于斜率的凸点筛选;d,基于斜率的凸点排序;e,获得散点凸包。
优选的,步骤S3中,区域划分的过程中,A1,提取脚底压力边界;A2,提取边界所在的散点凸包;A3,找到散点凸包的最小外接矩形;A4,外界矩形的长边与竖直方向的夹角就是需要调整的足部角度。
优选的,步骤S4中,穿戴者下蹲初期,大腿与小腿关节弯曲,第一弹簧发生形变,拉绳由松弛处于紧绷状态,弹簧组件蓄能,为大腿提供良性支撑和缓冲,下蹲后半段受力点下移至小腿处,第一弹簧受到拉绳的作用限制形变,为大腿提供刚性支撑,第二弹簧继续发生形变,继续增加弹性组件蓄能,弹性组件吸收身体释放的重力势能,当穿戴者起身时,弹性组件释放蓄能,对穿戴者提供助力,达到良好的助力效果。
优选的,一种基于下肢外骨骼的人体辅助方法采用一种人体下肢外骨骼机器人;包括机械机构和控制系统,所述机械机构包括背板和固定架;所述背板靠近底部的一侧与所述固定架连接,所述固定架为一个四边形的框架,用于固定在人体的腰腹处;所述固定架的两侧对称设有大腿杆,所述大腿杆的下方连接有小腿杆;所述小腿杆底部连接测力鞋;所述小腿杆的内侧设有弹性组件,所述弹性组件与所述测力鞋远离小腿杆的一侧连接,所述弹性组件的另一端连接有支座;所述大腿杆额小腿杆均设有固定带,通过固定带固定在使用者腿部;
所述控制系统包括单片机、上位机、云端服务器、移动端、位移传感器、压力传感器;所述位移传感器和压力传感器设定在测力鞋底部,压力传感器获得行走时足部受力情况,传递给单片机的控制器,通过计算和调整外骨骼运动,使外骨骼与人体行走同步,同时位移传感器将位移数据传输至控制器,控制器通过人体移动的距离来判断运动情况,使外骨骼控制器及时得到运动的信息反馈,根据反馈信息及时作出调整,保证外骨骼与人体的运动同步性。
优选的,所述大腿杆连接在固定架的中心处,所述大腿杆通过销轴与固定架转动连接,固定架开设有多个通孔,大腿杆通过销轴设置在不同的通孔内进行调节;所述大腿杆靠近顶部五分之一处连接有第一电驱动缸的伸缩端,所述第一电驱动缸另一端与所述背板的底部连接;所述第一电驱动缸的神缩端通过销轴与大腿杆转动连接,所述大腿杆上竖向开设有多个销孔,通过销轴插入不同的销孔进行高度调节;所述大腿杆的下方通过销轴与所述小腿杆转动连接。
优选的,所述大腿杆与小腿杆之间设置有第二电驱动缸,所述第二电驱动缸设在大腿杆和小腿杆的前侧,通过第二电驱动缸辅助大腿杆与小腿杆之间的弯曲,第二电驱动缸的伸缩杆直线运动,使大腿杆和小腿杆之间相互转动。
优选的,所述所述大腿杆与小腿杆之间设置有气缸,所述气缸设置在远离第二电驱动缸的一侧,所述气缸对大腿杆和小腿杆的弯曲侧进行支撑,防止大腿杆和小腿杆旋转角过大损坏第二电驱动缸。
优选的,所述小腿杆的底部与所述测力鞋转动连接,小腿杆底部通过球铰与测力鞋连接,能够进行水平或者竖直平面内的转动;所述弹性组件的底部与测力鞋采用球铰的连接方式。
优选的,所述弹性组件包括第一弹簧,所述第一弹簧的的一端与所述支座连接,所述第一弹簧的另一端连接有连接块,第一弹簧通过连接块连接有第二弹簧,所述第二弹簧的另一端与测力鞋连接;所述第一弹簧的内部设有拉绳,所述拉绳的一端与支座连接,拉绳的另一端与连接块连接,所述拉绳预留2-4cm的松弛预留量,限制第一弹簧的最大拉伸长度和回弹力。
优选的,所述控制系统中,得到足底压力信号数据,经过足底压力信号数据分析和处理,采用wifi模块发送至云服务器,云服务器通过TCP网络协议发送至移动端,通过移动端app及时了解自身恢复情况,以便进行自身调节训练、提高恢复效率。
优选的,足底压力信号数据分析过程采用一种提取压力散的方法进行提取,对足底压力角度进行纠正,对于压力值提取更加精确,减小行为误差。
优选的,所述弹性组件随着运动的状态发生形变,如下蹲或者迈步;人自然站立的情况下,弹性组件的弹性系数y=1/(1/y1+1/y2);y1是第一弹簧的弹性系数,y2是第二弹簧的弹性系数;此时弹性组件的长度D1=D2+D3;弹簧的蓄能E为0;D2是第一弹簧的长度,D3是第二弹簧的长度;下蹲初期过程中弹簧受到拉力弯曲变长,此时弹簧组件长度为D11,D11=D21+D31;D21为形变之后第一弹簧的长度,D31为形变之后第二弹簧的长度;则此时弹簧的蓄能为2E1=y(D11-D1)
提取压力散点的方法a,散点凸包选取,找出足底压力传感器采集数据的最左x1,最右x2、最上z1、最下z2四个点,作为基准凸包的顶点构成基准凸包,最大限度包含凹点,以四个基准点构造分别与X轴盒Y轴平行的矩形,所有采集的重心轨迹都包括在此矩形内;之后连接最左x1和最下z2的两个点构成直线L1;最右x2和最上z1两个点构成直线L2,最右x2和最下z2两个点构成直线L3,最左x1和最上z1两个点构成直线L4。
b,基于斜率的点集分区,通过步骤a可得到四条直线,L1、L2、L3、L4,四条直线的斜率分别为k1、k2、k3、k4;将最左x1除四个基准点以外的任一点P连线,可得到此直线的斜率k11,若k11> k1则说明该点在直线L1的左侧,若k11> k1则说明该点在直线L4的下侧;同理采用此种办法可以判定足部压力范围内的所有点数据;
c,基于斜率的凸点筛选,经过步骤b分区自后,以最右x2、最上z1点为基准,找出一点m,与x2连接斜率最小,找出一点n与z1点连接斜率最大,直线mn的斜率为k
d,基于斜率的凸点排序,选取最左x1为基准点,连接x1点与其他凸点,计算所得直线斜率,按照斜率从大到小顺序对凸点进行排序,得到凸点的排列顺序;e,得到散点凸包。对足底压力进行区域划分,增加足底压力变化采集数据的准确性。
基于提取压力散点的方法对足底压力进行区域划分,对足底压力角度进行纠正之后,对足底压力进行区域划分,增加足底压力变化采集数据的准确性,分区误差降至1%以下,提高了压力分区的准确性,两者相互结合,增加了数据提取的准确性;增加准确性减小数据采集的误差,及时得到信息反馈,进一步提升外骨骼机器人对穿戴者的辅助监测的准确性。
与现有技术相比,本发明具有以下有益效果:
(1)本发明一种基于下肢外骨骼的人体辅助方法,通过设置的大腿杆和小腿杆完成人体运动模拟方式,同时结合设置的弹性组件,两者共同作用,通过弹性组件改变下蹲或者弹跳中的支撑力,运动恢复之后时增加助力,通过可变刚性支撑,增加使用舒适度,减小对穿戴者运动幅度的束缚,提升穿戴者恢复效率。
(2)本发明一种基于下肢外骨骼的人体辅助方法,通过对足底压力数据的分析处理,对足底压力角度进行纠正,对于压力值提取更加精确,减小行为误差。
(3)本发明一种基于下肢外骨骼的人体辅助方法,对足底压力进行区域划分,增加足底压力变化采集数据的准确性;增加准确性减小数据采集的误差,及时得到信息反馈,进一步提升外骨骼机器人对穿戴者的辅助监测的准确性。
(4)本发明一种基于下肢外骨骼的人体辅助方法,通过弹性组件和大腿杆小腿杆的有益结合,大大提升了使用舒适度,减小对穿戴者运动幅度的束缚,提升穿戴者恢复效率。
(5)本发明一种基于下肢外骨骼的人体辅助方法,基于提取压力散点的方法对足底压力进行区域划分,对足底压力角度进行纠正之后,增加足底压力变化采集数据的准确性,分区误差降至1%以下,提高了压力分区的准确性,两者相互结合,共同作用,增加了数据提取的准确性。
(6)本发明一种基于下肢外骨骼的人体辅助方法,通过设置的弹性组件,限定弹性组件弹性系数与伸长量、蓄能之间的关系,对穿戴者提供助力,达到良好的助力效果,防止训练过程中对患者的二次伤害,增加使用安全性。
附图说明
为了更清楚地说明本发明实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本发明的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
图1是本发明的整体结构示意图。
图2是本发明的大腿杆与小腿杆连接关系示意图。
图3是本发明的正视图。
图4是本发明的结构简图。
图5是本发明的弹性组件示意图。
图6是本发明的弹簧组件形变过程示意图。
图7是本发明的控制系统框图。
图8是本发明的通信系统框图。
图9是本发明的足底控制框架。
图10是本发明的提取压力散点流程图。
图11是本发明的足底压力区域划分流程图。
图12是本发明的方法流程示意图。
图中:1、背板;2、固定架;3、大腿杆;4、小腿杆;5、测力鞋;6、弹性组件;7、支座;8、第一电驱动缸;9、第二电驱动缸;10、固定带;11、气缸;61、第一弹簧;62、第二弹簧;63、拉绳;64、连接块。
具体实施方式
为使本发明实施方式的目的、技术方案和优点更加清楚,下面将结合本发明实施方式中的附图,对本发明实施方式中的技术方案进行清楚、完整地描述。显然,所描述的实施方式是本发明一部分实施方式,而不是全部的实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
因此,以下对在附图中提供的本发明的实施方式的详细描述并非旨在限制要求保护的本发明的范围,而是仅仅表示本发明的选定实施方式。基于本发明中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本发明保护的范围。
实施例一
如图12所示,一种基于下肢外骨骼的人体辅助方法;包括以下步骤:S1:通过压力传感器和位移传感器采集运动数据,传输至单片机;
S2:根据压力传感器获取足底压力数据;根据位移传感器记录运动的距离并进行存储;
S3:对足部压力数据进行进行数据处理和足底压力区域划分,通过单片机计算和分析传递给控制器,控制器通过综合数据制定好相应的控制策略,之后传递给电驱动缸和气缸执行驱动,在执行驱动的过程中,将运动效果通过压力传感器和位移传感器传递给控制器,形成运动信息反馈;
S4:驱动过程中通过弹性机构进行辅助弹跳、下蹲、疾走动作。
步骤S3中,足部压力数据处理采用一种提取压力散点的方法包括以下步骤,a,散点凸包选取;b,基于斜率的点集分区;c,基于斜率的凸点筛选;d,基于斜率的凸点排序;e,获得散点凸包。
步骤S3中,区域划分的过程中,A1,提取脚底压力边界;A2,提取边界所在的散点凸包;A3,找到散点凸包的最小外接矩形;A4,外界矩形的长边与竖直方向的夹角就是需要调整的足部角度。
步骤S4中,穿戴者下蹲初期,大腿与小腿关节弯曲,第一弹簧发生形变,拉绳由松弛处于紧绷状态,弹簧组件蓄能,为大腿提供良性支撑和缓冲,下蹲后半段受力点下移至小腿处,第一弹簧受到拉绳的作用限制形变,为大腿提供刚性支撑,第二弹簧继续发生形变,继续增加弹性组件蓄能,弹性组件吸收身体释放的重力势能,当穿戴者起身时,弹性组件释放蓄能,对穿戴者提供助力,达到良好的助力效果。
实施例二:
如图1-4所示,一种人体下肢外骨骼机器人;包括机械机构和控制系统,所述机械机构包括背板1和固定架2;所述背板1靠近底部的一侧与所述固定架2连接,所述固定架2为一个四边形的框架,用于固定在人体的腰腹处;所述固定架2的两侧对称设有大腿杆3,所述大腿杆3的下方连接有小腿杆4;所述小腿杆4底部连接测力鞋5;所述小腿杆4的内侧设有弹性组件6,所述弹性组件6与所述测力鞋5远离小腿杆4的一侧连接,所述弹性组件6的另一端连接有支座7;所述大腿杆3额小腿杆4均设有固定带10,通过固定带10固定在使用者腿部;
所述控制系统包括单片机、上位机、云端服务器、移动端、位移传感器、压力传感器;所述位移传感器和压力传感器设定在测力鞋5底部,压力传感器获得行走时足部受力情况,传递给单片机的控制器,通过计算和调整外骨骼运动,使外骨骼与人体行走同步,同时位移传感器将位移数据传输至控制器,控制器通过人体移动的距离来判断运动情况,使外骨骼控制器及时得到运动的信息反馈,根据反馈信息及时作出调整,保证外骨骼与人体的运动同步性。
所述大腿杆3连接在固定架2的中心处,所述大腿杆3通过销轴与固定架2转动连接,固定架2开设有多个通孔,大腿杆3通过销轴设置在不同的通孔内进行调节;所述大腿杆3靠近顶部五分之一处连接有第一电驱动缸8的伸缩端,所述第一电驱动缸8另一端与所述背板1的底部连接;所述第一电驱动缸8的神缩端通过销轴与大腿杆3转动连接,所述大腿杆3上竖向开设有多个销孔,通过销轴插入不同的销孔进行高度调节;所述大腿杆3的下方通过销轴与所述小腿杆4转动连接。
所述大腿杆3与小腿杆4之间设置有第二电驱动缸9,所述第二电驱动缸9设在大腿杆3和小腿杆4的前侧,通过第二电驱动缸9辅助大腿杆3与小腿杆4之间的弯曲,第二电驱动缸9的伸缩杆直线运动,使大腿杆3和小腿杆4之间相互转动。
所述所述大腿杆3与小腿杆4之间设置有气缸11,所述气缸11设置在远离第二电驱动缸9的一侧,所述气缸11对大腿杆3和小腿杆4的弯曲侧进行支撑,防止大腿杆3和小腿杆4旋转角过大损坏第二电驱动缸9;所述小腿杆4的底部与所述测力鞋5转动连接,小腿杆4底部通过球铰与测力鞋5连接,能够进行水平或者竖直平面内的转动;所述弹性组件6的底部与测力鞋5采用球铰的连接方式。
实施例三:
如图5-6所示,在实施例一的基础上,所述弹性组件6包括第一弹簧61,所述第一弹簧61的的一端与所述支座7连接,所述第一弹簧61的另一端连接有连接块64,第一弹簧61通过连接块64连接有第二弹簧62,所述第二弹簧62的另一端与测力鞋5连接;所述第一弹簧61的内部设有拉绳63,所述拉绳63的一端与支座7连接,拉绳63的另一端与连接块64连接,所述拉绳63预留2-4cm的松弛预留量,限制第一弹簧61的最大拉伸长度和回弹力。
所述弹性组件6随着运动的状态发生形变,如下蹲或者迈步;人自然站立的情况下,弹性组件6的弹性系数y=1/1/y1+1/y2;y1是第一弹簧61的弹性系数,y2是第二弹簧62的弹性系数;此时弹性组件6的长度D1=D2+D3;弹簧的蓄能E为0;D2是第一弹簧61的长度,D3是第二弹簧62的长度;下蹲初期过程中弹簧受到拉力弯曲变长,此时弹簧组件长度为D11,D11= D21+D31;D21为形变之后第一弹簧61的长度,D31为形变之后第二弹簧62的长度;则此时弹簧的蓄能为2E1=yD11-D1
实施例四:
如图7-10所示,在实施例一的基础上,所述控制系统中,得到足底压力信号数据,经过足底压力信号数据分析和处理,采用wifi模块发送至云服务器,云服务器通过TCP网络协议发送至移动端,通过移动端app及时了解自身恢复情况,以便进行自身调节训练、提高恢复效率。
足底压力信号数据分析过程采用一种提取压力散的方法进行提取,对足底压力角度进行纠正,对于压力值提取更加精确,减小行为误差。
实施例五
在实施例三的基础上,提取压力散点的方法a,散点凸包选取,找出足底压力传感器采集数据的最左x1,最右x2、最上z1、最下z2四个点,作为基准凸包的顶点构成基准凸包,最大限度包含凹点,以四个基准点构造分别与X轴盒Y轴平行的矩形,所有采集的重心轨迹都包括在此矩形内;之后连接最左x1和最下z2的两个点构成直线L1;最右x2和最上z1两个点构成直线L2,最右x2和最下z2两个点构成直线L3,最左x1和最上z1两个点构成直线L4,为下一步做准备。
b,基于斜率的点集分区,通过步骤a可得到四条直线,L1、L2、L3、L4,四条直线的斜率分别为k1、k2、k3、k4;将最左x1除四个基准点以外的任一点P连线,可得到此直线的斜率k11,若k11> k1则说明该点在直线L1的左侧,若k11> k1则说明该点在直线L4的下侧;同理采用此种办法可以判定足部压力范围内的所有点数据;
c,基于斜率的凸点筛选,经过步骤b分区自后,以最右x2、最上z1点为基准,找出一点m,与x2连接斜率最小,找出一点n与z1点连接斜率最大,直线mn的斜率为k
d,基于斜率的凸点排序,选取最左x1为基准点,连接x1点与其他凸点,计算所得直线斜率,按照斜率从大到小顺序对凸点进行排序,得到凸点的排列顺序;e,得到散点凸包。对足底压力进行区域划分,增加足底压力变化采集数据的准确性。
实施例六
在实施例四的基础上,如图11所示,基于提取压力散点的方法对足底压力进行区域划分,区域划分的过程中,A1,提取脚底压力边界;A2,提取边界所在的散点凸包;A3,找到散点凸包的最小外接矩形;A4,外界矩形的长边与竖直方向的夹角就是需要调整的足部角度;基于提取压力散点的方法对足底压力进行区域划分,对足底压力角度进行纠正之后,对足底压力进行区域划分,增加足底压力变化采集数据的准确性,分区误差降至1%以下,提高了压力分区的准确性,两者相互结合,增加了数据提取的准确性;增加准确性减小数据采集的误差,及时得到信息反馈,进一步提升外骨骼机器人对穿戴者的辅助监测的准确性。
通过上述技术方案得到的装置是一种基于下肢外骨骼的人体辅助方法,通过设置的大腿杆和小腿杆完成人体运动模拟方式,同时结合设置的弹性组件,两者共同作用,通过弹性组件改变下蹲或者弹跳中的支撑力,运动恢复之后时增加助力,通过可变刚性支撑,增加使用舒适度,减小对穿戴者运动幅度的束缚,提升穿戴者恢复效率,及时得到信息反馈,进一步提升外骨骼机器人对穿戴者的辅助监测的准确性;通过弹性组件和大腿杆小腿杆的有益结合,大大提升了使用舒适度,减小对穿戴者运动幅度的束缚,提升穿戴者恢复效率;基于提取压力散点的方法对足底压力进行区域划分,对足底压力角度进行纠正之后增加足底压力变化采集数据的准确性,分区误差降至1%以下,提高了压力分区的准确性,两者相互结合,共同作用,增加了数据提取的准确性;通过设置的弹性组件,限定弹性组件弹性系数与伸长量、蓄能之间的关系,对穿戴者提供助力,达到良好的助力效果,防止训练过程中对患者的二次伤害,增加使用安全性。
本发明中未详细阐述的其它技术方案均为本领域的现有技术,在此不再赘述。
以上所述仅为本发明的优选实施方式而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化;凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种基于下肢外骨骼的人体辅助方法
- 一种基于人体下肢外骨骼的(康复)机器人