一种采用数字控制的双向PFC系统
文献发布时间:2023-06-19 11:49:09
技术领域
本发明涉及PFC系统相关领域,具体为一种采用数字控制的双向PFC系统。
背景技术
随着全球经济的发展,环境问题成为各个国家日趋需要解决的问题。全球都在推动新能源汽车的发展,大量的电动车涌现在市场,加大了对电网的依赖,电动汽车充放电行为对电网的影响显著增加。
PFC控制在车载充电机(OBC)成为必不可少的一环,为了降低充电过程中充电机对电网的干扰。PFC正向工作实现AC/DC,电网接入,为电动汽车电池充电;PFC反向工作实现DC/AC,电能从电池组反向逆变,产生交流电。双向OBC可以很好地将充电和放电集成在同一个电力电子变换器中,可以有效地降低成本和体积,提高功率密度。所以,推动双向OBC的发展成为必要性。
现在市场上双向PFC控制策略,很多都采用双闭环PI控制,电压外环电流内环的控制策略。因为PI算法在高频信号的增益会较低,而对低频信号有较大的放大作用,这样PI算法会在低频时放大噪声信号,且由于整流装置和逆变装置是非线性系统,所以采用传统的双闭环PI控制可能难以达到满意的控制效果。针对这个问题,设计了一种采用数字控制的双向PFC系统。
发明内容
本发明的目的在于提供一种采用数字控制的双向PFC系统,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种采用数字控制的双向PFC系统,包括PFC主电路、电压外环控制模块、电流内环控制模块和主控芯片,其特征在于:所述PFC主电路通过主控芯片的ADC采样得到交流电压、交流电流和输出电压采样值,所述交流电压、交流电流和输出电压采样值输入进电压外环控制模块和电流内环控制模块中,再由所述电压外环控制模块和电流内环控制模块经过PWM控制PFC主电路。
优选的,所述PFC主电路采用图腾柱PFC的结构。
优选的,所述主控芯片采用市面主流的100MHz主频的DSP芯片
优选的,所述PFC主电路有两种工作方式,分别为:PFC正向工作时,主控芯片的ADC采样PFC主电路得到母线电压输进电压外环控制模块进行电压外环控制,然后,电压外环控制模块输出交流电压前馈,再进入电流内环控制模块进行电流内环控制且输出反馈电流,最后,将电流内环控制模块输出限幅进入PWM,从而对PFC控制;PFC逆向工作时,主控芯片的ADC采样PFC主电路得到输出交流电压进入电压外环控制模块进行电压外环控制,然后,电压外环控制模块输进电流内环控制模块进行电流内环控制,最后,电流内环控制模块输出限幅进行SPWM控制PFC逆向模式
优选的,所述电压外环控制模块和电流内环控制模块之间采用双闭环控制,且双闭环控制采用PIR算法
优选的,所述PIR算法的传递函数为:
与现有技术相比,本发明的有益效果是:本发明通过对PIR算法的离散化,进行图腾柱PFC正向和逆向的双闭环控制算法,算法改进后,PIR算法在低频和高频控制都比较良好,系统跟踪更加好,稳态误差更小,整体性能得到综合的提高,从而整体上提高OBC的性能。
附图说明
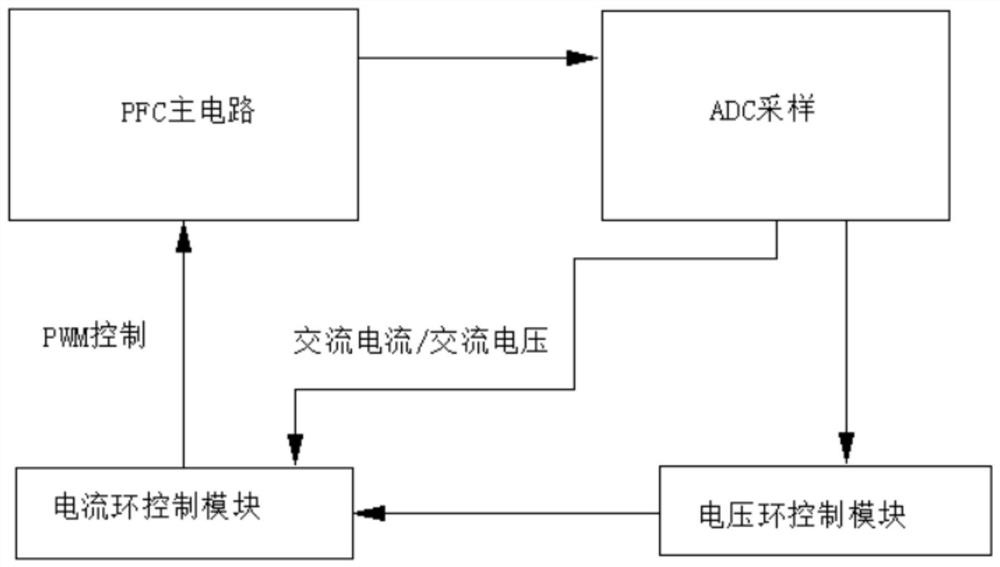
图1为本发明的系统结构框图;
图2为本发明的正向PFC简洁拓扑结构图;
图3为本发明的逆向PFC简洁拓扑结构图;
图4为本发明的双闭环控制流程示意图;
图5为本发明的双闭环控制中断程序流程示意图;
图6为本发明的正向PFC控制框图;
图7为本发明的逆向PFC控制框图;
图8为本发明的PI算法kp=1、20、100伯德图;
图9为本发明的PI算法ki=1、20、100伯德图;
图10为本发明的PR算法kp=1、20、100伯德图;
图11为本发明的PR算法kr=1、20、100伯德图;
图12为本发明的PIR算法kp=1、20、100伯德图;
图13为本发明的PIR算法kr=1、20、100伯德图;
图14为本发明的PIR算法wc=6.28、314、628伯德图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-13,本发明提供一种技术方案:一种采用数字控制的双向PFC系统,包括PFC主电路、电压外环控制模块、电流内环控制模块和主控芯片,其特征在于:PFC主电路通过主控芯片的ADC采样得到交流电压、交流电流和输出电压采样值,交流电压、交流电流和输出电压采样值输入进电压外环控制模块和电流内环控制模块中,再由电压外环控制模块和电流内环控制模块经过PWM控制PFC主电路。
进一步的,PFC主电路采用图腾柱PFC的结构。
进一步的,主控芯片采用市面主流的100MHz主频的DSP芯片
进一步的,PFC主电路有两种工作方式,分别为:PFC正向工作时,主控芯片的ADC采样PFC主电路得到母线电压输进电压外环控制模块进行电压外环控制,然后,电压外环控制模块输出交流电压前馈,再进入电流内环控制模块进行电流内环控制且输出反馈电流,最后,将电流内环控制模块输出限幅进入PWM,从而对PFC控制;PFC逆向工作时,主控芯片的ADC采样PFC主电路得到输出交流电压进入电压外环控制模块进行电压外环控制,然后,电压外环控制模块输进电流内环控制模块进行电流内环控制,最后,电流内环控制模块输出限幅进行SPWM控制PFC逆向模式
进一步的,电压外环控制模块和电流内环控制模块之间采用双闭环控制,且双闭环控制采用PIR算法
进一步的,PIR算法的传递函数为:
本发明主要对电流内环和电压外环的控制算法进行改进,而理想的PR算法,调整PR的相关参数变化不是很大,在实际应用中,图形变化很小,跟踪效果也不会很好。所以采用PR算法的改进算法—PIR算法。下面比较一下PI算法,PR算法和PIR算法。其中理想PR算法的传递函数为:
PI算法,kp=1、20、100,ki=20的伯德图如图8所示。
PI算法,ki=1、20、100,kp=1的伯德图如下图9所示。
由图8和图9可以看出,PI控制器低频有较大的放大作用,高频信号增益会较低。如果对工频及以下的频率的信号进行跟踪,系统响应会较差,低频噪声和谐波含量会较大。
PR算法,kp=1、20、100,kr=20的伯德图如图10所示。
PR算法,kr=1、20、100,kp=1的伯德图如下图11所示。
由图10和图11中理想的PR算法伯德图可以看出,即使参数变化,对波形影响较小。系统跟踪性能也会较差。接下来用改进的PR算法—PIR算法。
PIR算法,kp=1、20、100,kr=20,wc=62.8的伯德图如图12所示。
PIR算法,kr=1、20、100,kp=1,wc=62.8的伯德图如图13所示。
PIR算法,wc=6.28、314、628,kp=20,kr=100的伯德图如图14所示。
通过的PI和PIR算法的伯德图可以看出,PI和PIR算法kp类似,都是增大开环增益,增加控制精度;ki和kr的作用也类似,都是降低系统稳态误差。
通过对PIR算法的离散化,进行图腾柱PFC正向和逆向的双闭环控制算法,算法改进后,系统跟踪更加好,稳态误差更小,整体性能得到综合的提高,从整体上提高OBC的性能。PIR算法在低频和高频控制都比较良好。
工作原理:正向PFC拓扑结构工作原理如图2,其中PQ4和PQ3是高速管,且选择的是sic管,PQ2和PQ1是低速管,选择的是普通MOS管。该正向PFC拓扑结构,交流电压大于0时,PQ1始终导通,PQ2始终关闭,PQ4和PQ3是PWM进行控制的互补管,PQ3导通进行升压工作,PQ4导通进行续流工作;交流电压小于0时,PQ2始终导通,PQ1始终关闭,PQ4和PQ3是PWM进行控制的互补管,PQ4导通进行升压工作,PQ3导通进行续流工作。并且在交流电压过零点进行软起操作。高速管频率我们设定为70khz,低速管频率50hz。
逆向PFC拓扑结构工作原理如图3,其中PQ4和PQ3是高速管,选择的是sic管,PQ2和PQ1是低速管,选择的是普通MOS管。该拓扑结构,交流电压正半周期,PQ1始终导通,PQ2始终关闭,PQ4和PQ3是PWM进行控制的互补管,PQ4导通输出电压为vdc,PQ3导通输出电压为0;交流电压负半周期,PQ2始终导通,PQ1始终关闭,PQ4和PQ3是PWM进行控制的互补管,PQ3导通输出电压为-vdc,PQ4导通输出电压为0。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种采用数字控制的双向PFC系统
- 一种基于数字控制系统充放电双向数字电源