一种农田农作物药物自动检测机器人
文献发布时间:2023-06-19 11:49:09
技术领域
本发明涉及药物自动检测技术领域,特别涉及一种农田农作物药物自动检测机器人。
背景技术
农产品污染主要来自于农药残留、硝酸盐和重金属。而农药残留主要是剧毒、高毒有机磷、氨基甲酸酯、有机氯超过规定标准。这些超标物质进入人体后,容易引起急性中毒、血液疾病、致畸、致癌、致基因突变。目前药物残留检测方式多为人工进行取样检测,工作量增大,且人工检测时易沾染药物,危害身体健康,所以急需一种农田农作物药物自动检测机器人。
发明内容
针对上述技术问题本发明提供一种农田农作物药物自动检测机器人,可以有效解决上述技术问题,具有自动化程度高,省时省力,安全系数高的特点。
所述的支撑平台为万向轮、喷洒机构、收集机构、检测机构的安装平台。
所述的喷洒机构包括:第一电机支架、第一电机、第一电机齿轮、第二圆筒、第二电机支架、第二电机、第二电机齿轮、第三圆筒、第三电机支架、第三电机、第三电机齿轮、储液桶。
所述的收集机构包括:收集盒安装架、晃动电机、晃动转杆、收集盒、支撑弹簧。
所述的检测机构包括:检测皮带、弹簧、检测器安装架、检测器。
所述的万向轮固定安装在支撑平台的下方,第一电机支架固定安装在第一圆筒外表面,第一电机固定安装在第一电机支架上方,第一电机齿轮和第一电机转轴固定连接,第二圆筒下端和第一电机齿轮相连接,形成齿轮配合,第二电机支架固定安装在第二圆筒外表面,第二电机和第二电机支架固定连接,第二电机齿轮和第二电机转轴固定连接,第三圆筒下端和第二电机齿轮相连接,形成齿轮配合,第三电机支架固定连接在第三圆筒外表面,第三电机固定安装在第三电机支架上方,第三电机齿轮和第三电机转轴固定连接,储液桶下端和第三电机齿轮相连接,形成齿轮配合,晃动电机固定安装在收集盒安装架上方,晃动转杆和晃动电机转轴固定连接,收集盒和晃动转杆固定连接,支撑弹簧上端和收集盒固定连接,下端和收集盒安装架固定连接,检测皮带和检测器安装架固定连接,弹簧下端和检测器安装架固定连接,检测器和检测器安装架固定连接。
进一步的,所述的喷洒机构还包括:升降台、喷洒电机、喷洒主动齿轮、喷洒从动齿轮、喷洒丝杠、第一升降台、齿条、第二升降台、升降齿轮、第三升降台、第一圆筒,升降台固定安装在支撑平台表面,喷洒电机固定安装在升降台内部,喷洒主动齿轮和喷洒电机转轴固定连接,喷洒从动齿轮和喷洒主动齿轮相连接,形成齿轮配合,喷洒丝杠和喷洒从动齿轮中心孔固定连接,第一升降台和喷洒丝杠相连接,形成转动配合,齿条固定安装在第一升降台内侧,升降齿轮和第二升降台相连接,形成转动配合,第三升降台和第二升降台、第一升降台通过齿条、升降齿轮齿轮配合相连接,上下移动,第一圆筒固定安装在第三升降台上方。
进一步的,所述的收集机构还包括:移动电机、第一齿轮、第二齿轮、齿轮连接轴、第三齿轮、第四齿轮、固定皮带轮、皮带、转动皮带轮、第一转杆、第二转杆,移动电机固定安装在支撑平台的上表面,第一齿轮和移动电机转轴固定连接,第二齿轮和第一齿轮相连接,形成转动配合,齿轮连接轴一端和第二齿轮固定连接,另一端和第三齿轮相连接,第四齿轮和第三齿轮相连接,形成齿轮配合,固定皮带轮和支撑平台固定连接,皮带和固定皮带轮相连接,形成转动配合,转动皮带轮和皮带相连接,形成转动配合,第一转杆一端和第四齿轮固定连接,另一端和第二转杆相连接,形成转动配合,第二转杆和收集盒安装架下方相连接,形成转动配合。
进一步的,所述的检测机构还包括:检测电机支架、检测电机、检测转杆、滑块、检测皮带轮,检测电机支架固定安装在支撑平台的侧面,检测电机固定安装在检测电机支架上方,检测转杆和检测电机转轴固定连接,滑块和检测转杆圆柱相连接,形成滑动配合,检测皮带轮和滑块圆柱相连接,形成转动配合,检测皮带和检测皮带轮相连接,形成转动配合,检测皮带为固定长度,一端和支撑平台固定连接,另一端和检测器安装架固定连接。
进一步的,所述的第三电机齿轮内部有高压喷水装置,可以将溶液喷洒足够距离。
进一步的,所述的支撑弹簧共有四个,上端和收集盒固定连接,下端和收集盒安装架固定连接。
进一步的,所述的升降台、第一升降台、升降齿轮、第三升降台内侧都有两个齿条,通过第二升降台齿轮配合实现上下移动。
进一步的,所述的第二齿轮、齿轮连接轴、第三齿轮、第四齿轮、固定皮带轮、皮带、转动皮带轮、第一转杆、第二转杆各为两个,分别安装在收集盒安装架下端和侧边,形成转动配合,收集盒安装架左右移动。
本发明与现有技术相比的有益效果是:(1)本发明通过喷洒机构的升降动作和转弯动作实现了180度喷洒溶液;(2)本发明通过收集盒晃动将药物溶液混合均匀,通过左右移动,自动检测药物含量;(3)该机器人可以通过万向轮实现自由移动,且造价低廉,便于推广。
附图说明
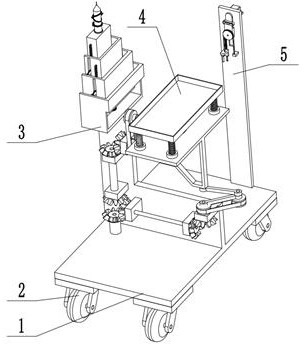
图1为本发明整体结构示意图。
图2为本发明喷洒机构示意图。
图3为本发明收集机构示意图。
图4为本发明检测机构示意图。
附图编号:1-支撑平台;2-万向轮;3-喷洒机构;4-收集机构;5-检测机构;301-升降台;302-喷洒电机;303-喷洒主动齿轮;304-喷洒从动齿轮;305-喷洒丝杠;306-第一升降台;307-齿条;308-第二升降台;309-升降齿轮;310-第三升降台;311-第一圆筒;312-第一电机支架;313-第一电机;314-第一电机齿轮;315-第二圆筒;316-第二电机支架;317-第二电机;318-第二电机齿轮;319-第三圆筒;320-第三电机支架;321-第三电机;322-第三电机齿轮;323-储液桶;401-移动电机;402-第一齿轮;403-第二齿轮;404-齿轮连接轴;405-第三齿轮;406-第四齿轮;407-固定皮带轮;408-皮带;409-转动皮带轮;410-第一转杆;411-第二转杆;412-收集盒安装架;413-晃动电机;414-晃动转杆;415-收集盒;416-支撑弹簧;501-检测电机支架;502-检测电机;503-检测转杆;504-滑块;505-检测皮带轮;506-检测皮带;507-弹簧;508-检测器安装架;509-检测器。
具体实施方式
下面结合具体实施例对本发明作进一步描述,在此发明的示意性实施例以及说明用来解释本发明,但并不作为对本发明的限定。
实施例:如图1、图2、图3、图4所示的一种农田农作物药物自动检测机器人,包括支撑平台1、万向轮2、喷洒机构3、收集机构4、检测机构5。
支撑平台1为万向轮2、喷洒机构3、收集机构4、检测机构5的安装平台。
万向轮2固定安装在支撑平台1的下方,第一电机支架312固定安装在第一圆筒311外表面,第一电机313固定安装在第一电机支架312上方,第一电机齿轮314和第一电机313转轴固定连接,第二圆筒315下端和第一电机齿轮314相连接,形成齿轮配合,第二电机支架316固定安装在第二圆筒315外表面,第二电机317和第二电机支架316固定连接,第二电机齿轮318和第二电机317转轴固定连接,第三圆筒319下端和第二电机齿轮318相连接,形成齿轮配合,第三电机支架320固定连接在第三圆筒319外表面,第三电机321固定安装在第三电机支架320上方,第三电机齿轮322和第三电机321转轴固定连接,储液桶323下端和第三电机齿轮322相连接,形成齿轮配合,晃动电机413固定安装在收集盒安装架412上方,晃动转杆414和晃动电机413转轴固定连接,收集盒415和晃动转杆414固定连接,支撑弹簧416上端和收集盒415固定连接,下端和收集盒安装架412固定连接,检测皮带506和检测器安装架508固定连接,弹簧507下端和检测器安装架508固定连接,检测器509和检测器安装架508固定连接。
喷洒机构3的具体结构如图2所示,升降台301固定安装在支撑平台1表面,喷洒电机302固定安装在升降台301内部,喷洒主动齿轮303和喷洒电机302转轴固定连接,喷洒从动齿轮304和喷洒主动齿轮303相连接,形成齿轮配合,喷洒丝杠305和喷洒从动齿轮304中心孔固定连接,第一升降台306和喷洒丝杠305相连接,形成转动配合,齿条307固定安装在第一升降台306内侧,升降齿轮309和第二升降台308相连接,形成转动配合,第三升降台310和第二升降台308、第一升降台306通过齿条307、升降齿轮309齿轮配合相连接,上下移动,第一圆筒311固定安装在第三升降台310上方,启动喷洒电机302,带动喷洒主动齿轮303转动,带动喷洒从动齿轮304转动,带动喷洒丝杠305转动,带动第一升降台306向上移动,通过齿条307、升降齿轮309齿轮连接带动第二升降台308向上移动,带动第三升降台310向上移动,在所需要的的高度时关闭喷洒电机302,启动第一电机313,带动第一电机齿轮314转动,带动第二圆筒315转动,关闭第一电机313,启动第二电机317,带动第二电机齿轮318,带动第三圆筒319转动,关闭第二电机317,启动第三电机321,带动第三电机齿轮322转动,带动储液桶323转动,关闭第三电机321,通过储液桶323将溶液高压喷出。
收集机构4的具体结构如图3所示,移动电机401固定安装在支撑平台1的上表面,第一齿轮402和移动电机401转轴固定连接,第二齿轮403和第一齿轮402相连接,形成转动配合,齿轮连接轴404一端和第二齿轮403固定连接,另一端和第三齿轮405相连接,第四齿轮406和第三齿轮405相连接,形成齿轮配合,固定皮带轮407和支撑平台1固定连接,皮带408和固定皮带轮407相连接,形成转动配合,转动皮带轮409和皮带408相连接,形成转动配合,第一转杆410一端和第四齿轮406固定连接,另一端和第二转杆411相连接,形成转动配合,第二转杆411和收集盒安装架412下方相连接,形成转动配合,启动移动电机401,带动第一齿轮402转动,带动第二齿轮403转动,带动齿轮连接轴404转动,带动第三齿轮405转动,带动第四齿轮406转动,带动皮带408转动,带动转动皮带轮409转动,带动第一转杆410转动,带动第二转杆411转动,带动收集盒安装架412左右移动,启动晃动电机413,带动晃动转杆414转动,带动收集盒415晃动,将溶液混合均匀。
检测机构5的具体结构如图4所示,检测电机支架501固定安装在支撑平台1的侧面,检测电机502固定安装在检测电机支架501上方,检测转杆503和检测电机502转轴固定连接,滑块504和检测转杆503圆柱相连接,形成滑动配合,检测皮带轮505和滑块504圆柱相连接,形成转动配合,检测皮带506和检测皮带轮505相连接,形成转动配合,检测皮带506为固定长度,一端和支撑平台1固定连接,另一端和检测器安装架508固定连接,启动检测电机502,带动检测转杆503转动,带动滑块504向下滑动,带动检测皮带轮505转动,带动检测皮带506转动,带动弹簧507压缩,带动检测器安装架508向下移动,带动检测器509向下移动,检测完成后,反向启动检测电机502检测机构5向上移动。
第三电机齿轮322内部有高压喷水装置,可以将溶液喷洒足够距离,支撑弹簧416共有四个,上端和收集盒415固定连接,下端和收集盒安装架412固定连接,升降台301、第一升降台306、升降齿轮309、第三升降台310内侧都有两个齿条307,通过第二升降台308齿轮配合实现上下移动,第二齿轮403、齿轮连接轴404、第三齿轮405、第四齿轮406、固定皮带轮407、皮带408、转动皮带轮409、第一转杆410、第二转杆411各为两个,分别安装在收集盒安装架412下端和侧边,形成转动配合,收集盒安装架412左右移动。
- 一种农田农作物药物自动检测机器人
- 一种农田农作物药物自动检测机器人