具有自适应变径机构的管道机器人
文献发布时间:2023-06-19 11:50:46
技术领域
本发明涉及一种管道机器人,尤其涉及一种具有自适应变径机构的管道机器人,尤其适用于管道的检测修复。
背景技术
管道机器人作为一种在特定环境中工作的智能装备,近年来,管道机器人一直是国内外学者的研究热点之一。现在管道机器人的行走方式包括滚轮式、履带式、支撑式、活塞式、螺旋式,其中由于轮式驱动具有高效率的动力传递、高平稳性的运动能力等优点成为管道机器人的主要驱动方式。但目前,管道机器人行走和转弯不稳定,无法适应不同管径等种类繁多的管线。
发明内容
本发明针对现有技术中存在的问题,提供了一种具有自适应变径机构的管道机器人,在现有管道机器人普通连杆机构的基础上,采用了具有更好的驱动传导功能和稳定能力的齿轮传动方式,用于解决管道机器人行走和转弯不稳定的问题。
本发明的技术方案如下:
一种具有自适应变径机构的管道机器人,包括工作端和联轴器,工作端之间通过联轴器连接;所述的联轴器上沿轴向间隔设有两组变径机构,所述变径机构单体包括控制器、液压升降装置、齿轮系、换向器、轮子、连杆机构、锥齿轮、步进电机及机身,所述控制器壳体一端与联轴器相连,控制器壳体的另一端与机身相连,液压升降装置套装在机身上,且液压升降装置电连接控制器,所述的连杆机构、锥齿轮、齿轮系、换向器及轮子设置有两套且对称设置在液压升降装置的两侧,其中,所述连杆机构的一端固定在液压升降装置的升降杆上,连杆机构的另一端与齿轮系的齿轮轴铰接,所述的步进电机安装于机身上, 步进电机输出轴连接锥齿轮;锥齿轮输出轴连接齿轮系并为其提供动力;齿轮系输出轴连接换向器;轮子安装在换向器的末端,换向器无线连接控制器。
所述的两组变径机构包括6个变径机构单体,每三个变径机构单体为一组,三个变径机构单体之间均匀间隔120度沿圆周设置在联轴器上。
所述的变径机构单体与联轴器拆卸式连接。
所述的齿轮系包括第一齿轮、第二齿轮、第三齿轮、第四齿轮及第五齿轮,第一齿轮、第二齿轮、第三齿轮、第四齿轮及第五齿轮为相互啮合的直齿轮,所述的连杆机构包括第一连杆和第二连杆,第一连杆和第二连杆安装在第一齿轮、第二齿轮、第三齿轮、第四齿轮及第五齿轮的两侧,其中,第一连杆的一端与固定在液压升降装置的升降杆上,第一连杆的另一端依次与第一齿轮、第二齿轮、第三齿轮的齿轮轴铰接;第二连杆依次与第一齿轮、第四齿轮及第五齿轮的齿轮轴铰接。
所述的锥齿轮包括相互啮合的第一锥齿轮和第二锥齿轮,步进电机的输出轴连接第一锥齿轮,第二锥齿轮输出轴连接齿轮系中的第五齿轮并为其提供动力。
所述的齿轮系中的第三齿轮的输出轴连接换向器。
所述的控制器为56点移动控制器ESX-3CM,控制器控制液压装置的升降及换向器的换向,控制器内存储有所述控制程序对应的程序代码。
本发明的优点效果如下:
轮子与换向器的组合,使机器人整体具有了快速暂停刹车、更好的适应性和高稳定性;本发明采用齿轮传动方式,一方面可以提高其负载能力,另一方面使此管道机器人解决管道机器人行走和转弯不稳定的问题;液压升降杆和连杆机构配合使用使机器人在管道中具备径向自适应能力,可实现稳定快速变径。
锥齿轮、齿轮系及连杆机构的设置,可以改变相对空间位置与连杆的运动,以确保步进电机所输出的扭矩通过齿轮系可直接传递到换向器进而传递到轮子上。同时,轮子与齿轮系之间通过换向器连接,既能处理制动紧急情况,又能提高车轮的稳定性。
三个变径机构单体之间均匀间隔120度沿圆周设置在联轴器上,三套独立的传动链不仅可以使机器人获得更大的驱动力,还可以让操作者根据不同的工作条件选择相应的驱动方式。例如: 当机器人攀爬时,同时使用三个电机驱动,以保证足够的驱动力。当机器人水平行走时,靠近管道下部的两个轮子作为驱动轮,另一个轮子作为从动轮,以提高驱动效率。
附图说明
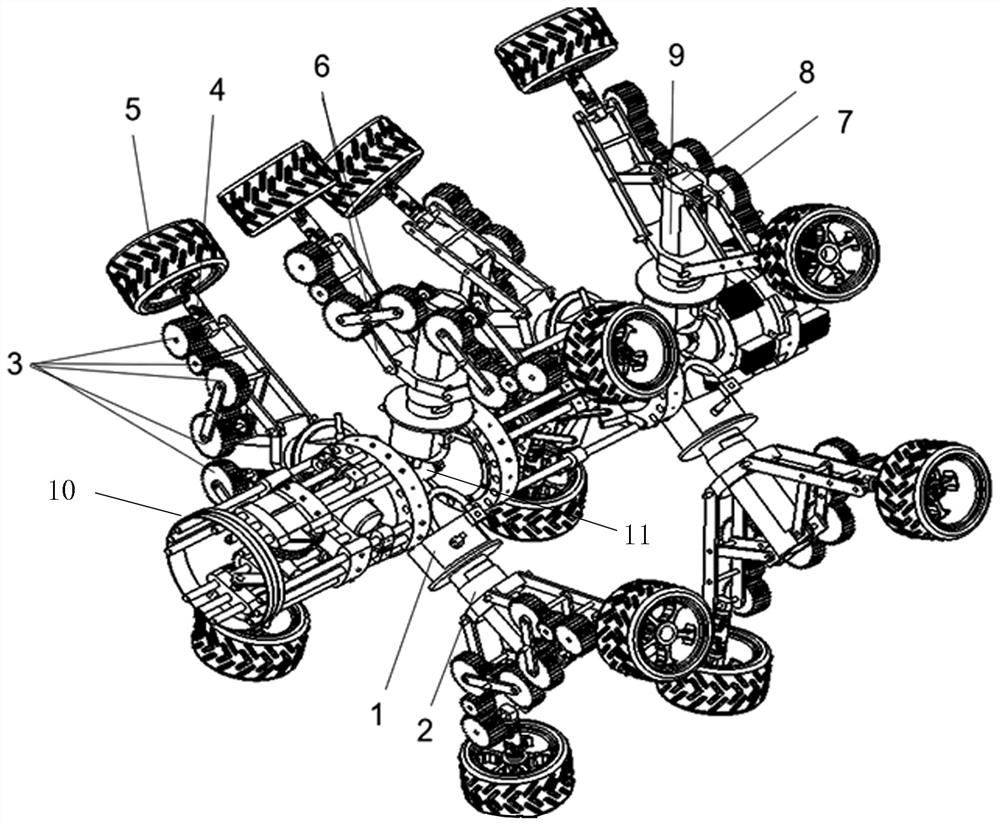
图1为本发明的整体结构示意图。
图2为本发明的变径机构单体的结构示意图。
图3为本发明连杆机构、锥齿轮、齿轮系、换向器及轮子的局部结构示意图。
图4为本发明驱动原理结构示意图。
图中,1、控制器,2、液压升降装置,3、齿轮系, 4、换向器, 5、轮子, 6、连杆机构,7、锥齿轮, 8、步进电机, 9、机身,10、工作端,11、联轴器;3-1、第一齿轮,3-2、第二齿轮,3-3、第三齿轮,3-4、第四齿轮,3-5、第五齿轮;6-1、第一连杆,6-2、第二连杆;7-1、第一锥齿轮,7-2、第二锥齿轮;。
具体实施方式
实施例
如图1-4所示,一种具有自适应变径机构的管道机器人,包括联轴器11和工作端10,工作端之间通过联轴器连接;所述的联轴器11上沿轴向间隔设有两组变径机构,所述变径机构单体包括控制器1、液压升降装置2、齿轮系3、换向器4、轮子5、连杆机构6、锥齿轮7、步进电机8及机身9,所述控制器壳体的一端与联轴器11之间采用插拔式可拆卸连接,控制器壳体的另一端通过焊接与机身9相连,液压升降装置2套装在机身9上,且液压升降装置电连接控制器,所述的连杆机构6、锥齿轮7、齿轮系3、换向器4及轮子5设置有两套且对称设置在液压升降装置2的两侧,其中,所述连杆机构6的一端通过螺栓紧固在液压升降装置的升降杆上,连杆机构6的另一端与齿轮系3的齿轮轴铰接,所述的步进电机8安装于机身上, 步进电机8输出轴连接锥齿轮7;锥齿轮7输出轴连接齿轮系并为其提供动力;齿轮系输出轴连接换向器4;轮子5通过轴、轴承安装在换向器4的末端,换向器4无线连接控制器1。
所述的两组变径机构包括6个变径机构单体,每三个变径机构单体为一组,三个变径机构单体之间均匀间隔120度沿圆周插拔式设置在联轴器上。
所述的齿轮系包括第一齿轮3-1、第二齿轮3-2、第三齿轮3-3、第四齿轮3-4及第五齿轮3-5,第一齿轮、第二齿轮、第三齿轮、第四齿轮及第五齿轮为相互啮合的直齿轮,所述的连杆机构包括第一连杆6-1和第二连杆6-2,第一连杆和第二连杆安装在第一齿轮、第二齿轮、第三齿轮、第四齿轮及第五齿轮的两侧,其中,第一连杆的一端通过螺栓紧固在液压升降装置的升降杆上,第一连杆的另一端依次与第一齿轮、第二齿轮、第三齿轮的齿轮轴铰接;第二连杆依次与第一齿轮、第四齿轮及第五齿轮的齿轮轴铰接。
所述连杆机构6通过调节连杆和机身9之间轴线的夹角即可更好的适应大小不同的管径,使轮子5拥有了较大的运动范围,增加了管道机器人在不同管径的管道中的适应能力。
所述的锥齿轮包括相互啮合的第一锥齿轮7-1和第二锥齿轮7-2,步进电机的输出轴连接第一锥齿轮7-1,第二锥齿轮7-2输出轴连接齿轮系中的第五齿轮3-5并为其提供动力。
所述的齿轮系中的第三齿轮的输出轴连接换向器。所述的换向器4末端设置的轮子5,使管道机器人通过轮子在管道内移动。其中换向器4直接与第三齿轮的输出轴和轮子5相连,既可以直接将齿轮系3输出的扭矩直接传到轮子5上,也可以增加轮子5在管道内行进的稳定性,同时,换向器4受控制器1的无线控制可以将轮子横放来实现快速刹车。
所述的控制器为56点移动控制器ESX-3CM,控制器控制液压装置的升降及换向器的换向,控制器内存储有所述控制程序对应的程序代码。控制器提供指令,液压装置2可以将整个变径机构提升或降低到合适高度,既可以提升管道机器人在行进过程中受到的缓冲能力,也可以更好的适应更多管径。所述的步进电机8共设置6个,每个变径机构单体使用一个电机。
本发明具体操作方式为:当管道机器人遇到前方管径减小或增大时,通过控制器1提供指令,液压装置2可以将整个变径机构提升或降低到合适高度,第一连杆6-1连接在液压升降装置的升降杆上,升降杆提升或下降从而带动第一连杆6-1的升降,最终实现角度变化,以及步进电机8带动锥齿轮7转动,进而带动同轴的第五齿轮3-5转到合适位置,达到与液压升降装置2的同步运行,并使得连杆机构6收缩或伸长,让轮子5紧贴管道内壁,此时步进电机8停止转动,即完成适应前方管径的操作,达到自适应不同管径的效果。
本发明的工作端包括检修工作端、检测工作端及传动工作端,工作端也可以是其它管道内的机器人作业端。
在本发明的描述中,需要说明的是,术语“中心”、“纵向”、“横向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作。因此不能理解为对本发明的限制,本发明的保护范围不受具体实施例所限制。
- 具有自适应变径机构的管道机器人
- 具有自适应变径机构的管道机器人