一种高压电子束焊机
文献发布时间:2023-06-19 11:50:46
技术领域
本发明一般涉及焊接设备技术领域,具体涉及一种高压电子束焊机。
背景技术
电子束焊机是利用高速运动的电子束流轰击工件的原理进行焊接加工的一种焊接设备。在焊接过程中利用定向高速运动的电子束流撞击工件使动能转化为热能而使工件熔化,形成焊缝。电子束能量密度高达108W/cm
目前,电子束焊机按加速电压主要可分为两类,一类是高压电子束焊机,一类是中压电子束焊机。高压电子束焊机电子枪比中压多一节栅偏级,且高压电子束会产生对人体有害的射线,需要进行包铅处理,导致体积和重量较大,且高压电缆较粗,柔韧性不好,所以高压电子束焊机的焊枪都是固定枪结构,在焊接时完全依靠工作台的运动完成焊接,焊接范围受到限制,不够灵活。中压电子束焊机枪体小巧,电缆柔韧性好,可将其和电机、导轨、机器人结合,形成室内动枪结构;此结构焊接灵活,可焊接复杂轨迹,空间利用率高,但是目前绝大部分的中压电子枪功率不够,无法焊接大厚度(>100mm)工件。因此,现有的电子束焊机设备亟待改进。
发明内容
鉴于现有技术中的上述缺陷或不足,期望提供一种增加焊接范围,提高真空室空间利用率,操作简便且易于实现的高压电子束焊机。
第一方面,本申请提供一种高压电子束焊机,包括:
基座,
真空室,开设在所述基座内,用于容纳待加工工件;
设置在所述真空室顶部的高压电子枪,用于给待加工工件喷射高压电子束流实现焊接;
所述真空室的顶端设有运动机构,用于驱动所述高压电子枪在所述真空室的顶部水平面内任意移动,以改变所述高压电子枪的加工位置。
根据本申请实施例提供的技术方案,所述运动机构具有回转运动组件和直线运动组件;所述回转运动组件与所述真空室可旋转连接,可带动所述直线运动组件旋转;所述直线运动组件与所述高压电子枪连接,用于改变所述高压电子枪在水平方向上的加工位置。
根据本申请实施例提供的技术方案,所述回转运动组件包括:设置在所述真空室顶端的旋转平台;所述旋转平台与所述真空室之间设有第一密封组件;
所述旋转平台与所述真空室的侧壁接触的内壁开设有两圈第一凹槽;所述第一密封组件包括两个安装在所述第一凹槽内的第一密封圈;
所述第一密封圈的两侧向外翻折,形成加强密封沿。
根据本申请实施例提供的技术方案,所述回转运动组件还包括:用于支撑所述旋转平台自由转动的旋转支撑件和开设在所述旋转平台上的移动通孔;所述旋转支撑件套设在所述真空室上;所述移动通孔与所述真空室顶部连通,用于所述高压电子枪向待加工工件喷射高压电子束流。
根据本申请实施例提供的技术方案,所述直线运动组件包括:设置在所述旋转平台上的导轨和设置在所述导轨上的滑台;所述滑台与所述旋转平台之间设有第二密封组件;
所述滑台底部开设有一圈第二凹槽;所述第二密封组件包括:设置在所述第二凹槽内的第二密封圈和橡胶条;所述第二密封圈靠近所述第二凹槽底部设置,所述橡胶条沿所述第二凹槽侧壁向外伸出,可与所述旋转平台滑动接触。
根据本申请实施例提供的技术方案,所述滑台上还开设有与所述移动通孔连通的安装孔,用于安装所述高压电子枪。
根据本申请实施例提供的技术方案,所述基座上设有第一驱动件,且其与所述旋转平台的传动齿啮合设置。
根据本申请实施例提供的技术方案,所述旋转平台上设有第二驱动件,且其与所述滑台侧沿的齿条啮合设置。
根据本申请实施例提供的技术方案,所述真空室的侧壁设有室门,且其上安装有观察窗。
根据本申请实施例提供的技术方案,所述室门与所述真空室之间设有第三密封组件;
所述真空室侧壁开设有第三凹槽;所述第三密封组件包括:设置在所述第三凹槽内的第三密封圈;所述第三密封圈一侧沿所述第三凹槽向外凸出,可抵在所述室门表面。
综上所述,本技术方案具体地公开了一种高压电子束焊机的具体结构。本申请具体地在基座与高压电子枪之间设计运动机构,其带动高压电子枪在真空室的顶部水平面内任意移动,以改变高压电子枪的加工位置,从而扩大高压电子枪的加工范围;
进一步地,运动机构具有回转运动组件与直线运动组件,且回转运动组件与真空室可旋转连接,高压电子枪安装在直线运动组件上,利用回转运动组件相对真空室旋转,带动直线运动组件转动,再配合直线运动组件带动高压电子枪沿水平方向移动,以改变高压电子枪在水平面内的任意位置,实现扩大高压电子枪的加工范围的目的。
附图说明
通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本申请的其它特征、目的和优点将会变得更明显:
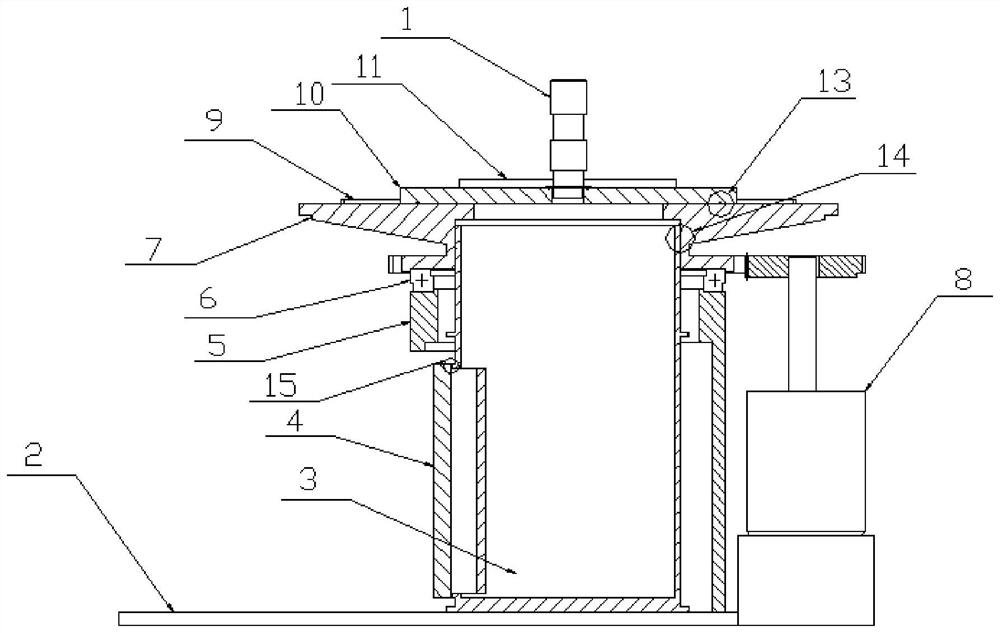
图1为一种高压电子束焊机的结构示意图。
图2为高压电子束焊机的整体结构示意图。
图3为高压电子束焊机的侧视结构示意图。
图4为高压电子束焊机的俯视结构示意图。
图5为第一密封组件的结构示意图。
图6为第二密封组件的结构示意图。
图中标号:1、高压电子枪;2、基座;3、真空室;4、室门;5、支撑套;6、推力球轴承;7、旋转平台;8、第一驱动件;9、导轨;10、滑台;11、齿条;12、第二驱动件;13、第一密封组件;14、第二密封组件;15、第三密封组件。
具体实施方式
下面结合附图和实施例对本申请作进一步的详细说明。可以理解的是,此处所描述的具体实施例仅仅用于解释相关发明,而非对该发明的限定。另外还需要说明的是,为了便于描述,附图中仅示出了与发明相关的部分。
需要说明的是,在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本申请。
实施例一
请参考图1所示的本申请提供的一种高压电子束焊机的第一种实施例的结构示意图,包括:
基座2,
真空室3,开设在所述基座2内,用于容纳待加工工件;
设置在所述真空室3顶部的高压电子枪1,用于给待加工工件喷射高压电子束流实现焊接;
所述真空室3的顶端设有运动机构,用于驱动所述高压电子枪1在所述真空室3的顶部水平面内任意移动,以改变所述高压电子枪1的加工位置。
在本实施例中,基座2作为本机构的基础部件,真空室3,开设在基座2内,用于容纳待加工工件,并为焊接工作提供真空环境;
高压电子枪1,设置在真空室3顶部,用于给待加工工件喷射高压电子束流实现焊接;并且,高压电子枪1位于真空室3的外部,提高真空室空间利用率,并且可以降低真空室抽真空的成本;
运动机构,设置在真空室3的顶端,用于驱动高压电子枪1在所述真空室3的顶部水平面内任意移动,以改变高压电子枪1的加工位置,从而扩大高压电子枪1的加工范围。
其中:
回转运动组件与安装在其上的直线运动组件形成运动机构,回转运动组件与真空室3的顶部可旋转连接,直线运动组件上安装高压电子枪1,利用回转运动组件相对真空室3旋转,带动直线运动组件转动,再配合直线运动组件带动高压电子枪1沿水平方向移动,以改变高压电子枪1在水平面内的任意位置,实现扩大高压电子枪1的加工范围的目的。
在任一优选的实施例中,所述回转运动组件包括:设置在所述真空室3顶端的旋转平台7;所述旋转平台7与所述真空室3之间设有第一密封组件13;
所述旋转平台7与所述真空室3的侧壁接触的内壁开设有两圈第一凹槽;所述第一密封组件13包括两个安装在所述第一凹槽内的第一密封圈;
所述第一密封圈的两侧向外翻折,形成加强密封沿。
在本实施例中,如图1所示,旋转平台7,设置在真空室3顶端,其可自由转动;用于带动直线运动组件旋转;并且,第一凹槽开设在旋转平台7与真空室3的侧壁接触的内壁,其数量为两圈,用于安装第一密封圈;
如图5所示,第一密封组件13,设置在旋转平台7与真空室3之间,在回转运动组件转动时,起到动态密封作用,以保证真空室3内的真空环境;进一步地,第一密封组件13包括两个第一密封圈,两个第一密封圈分别安装在相应的第一凹槽内,且第一密封圈的两侧向外翻折,形成加强密封沿,以进一步提高密封效果。
在任一优选的实施例中,所述回转运动组件还包括:用于支撑所述旋转平台7自由转动的旋转支撑件和开设在所述旋转平台7上的移动通孔;所述旋转支撑件套设在所述真空室3上;所述移动通孔与所述真空室3顶部连通,用于所述高压电子枪1向待加工工件喷射高压电子束流。
在本实施例中,旋转支撑件,设置在真空室3上,用于支撑旋转平台7自由转动;并且,如图1所示,旋转支撑件由支撑套5与推力球轴承6构成;具体地,支撑套5,套设在真空室3上,对推力球轴承6起到支撑作用;推力球轴承6,安装在支撑套5上,对旋转平台7的转动起到支撑作用;
移动通孔,开设在旋转平台7上,其与真空室3的顶部连通,用于高压电子枪1向待加工工件喷射高压电子束流,以便高压电子枪1对真空室3内的工件进行加工。
并且,传动齿,环设在旋转平台7的侧壁上,可利用安装在基座2上的第一驱动件8驱动旋转平台7旋转,其中,第一驱动件8具有设置在基座2上的驱动电机和与驱动电机输出轴连接的驱动齿轮,且驱动齿轮与传动齿啮合设置,利用驱动电机带动驱动齿轮旋转,再配合传动齿带动旋转平台7转动。
在任一优选的实施例中,所述直线运动组件包括:设置在所述旋转平台7上的导轨9和设置在所述导轨9上的滑台10;所述滑台10与所述旋转平台7之间设有第二密封组件14;
所述滑台10底部开设有一圈第二凹槽;所述第二密封组件14包括:设置在所述第二凹槽内的第二密封圈和橡胶条;所述第二密封圈靠近所述第二凹槽底部设置,所述橡胶条沿所述第二凹槽侧壁向外伸出,可与所述旋转平台7滑动接触。
在本实施例中,如图2、图3和图4所示,导轨9,设置在旋转平台7上,且其与旋转平台7上的移动通孔平行设置,为滑台10提供移动的路径;
滑台10,设置在导轨9上,高压电子枪1安装其上,滑台10可在导轨9上自由移动,以带动高压电子枪1在水平方向上移动;并且,第二凹槽,开设在滑台底部,用于安装第二密封组件14;
安装孔,开设在滑台10上,且其与移动通孔连通,用于安装高压电子枪1;
如图6所示,第二密封组件14,设置在所述滑台10与所述旋转平台7之间,在直线运动组件移动时,起到动态密封作用,以保证真空室3内的真空环境;进一步地,第二密封组件14包括:第二密封圈和橡胶条;第二密封圈位于第二凹槽底部,橡胶条沿第二凹槽侧壁向外伸出,与旋转平台7可形成滑动接触,以实现密封效果。
进一步地,齿条11,设置在滑台10与导轨9平行的两侧,可利用旋转平台7上安装的第二驱动件12驱动齿条11移动,以带动滑台10在水平方向上移动;其中,第二驱动件12具有设置在旋转平台7表面的电机和与电机输出轴连接的驱动齿轮,且驱动齿轮与齿条啮合设置,利用电机带动驱动齿轮转动,进而带动齿条11在水平方向上移动,以改变高压电子枪1在水平方向上的位置。
在任一优选的实施例中,所述真空室3的侧壁设有室门4,且其上安装有观察窗。
在本实施例中,如图2所示,室门4,设置在真空室3的侧壁,以便将待加工工件移送至真空室3内;
进一步地,观察窗,开设在室门4上,以便在进行焊接时,观察真空室3内工件的焊接状况。
在任一优选的实施例中,所述室门4与所述真空室3之间设有第三密封组件15;
所述真空室3侧壁开设有第三凹槽;所述第三密封组件15包括:设置在所述第三凹槽内的第三密封圈;所述第三密封圈一侧沿所述第三凹槽向外凸出,可抵在所述室门4表面。
在本实施例中,第三密封组件15,设置在室门4与真空室3之间,且其位于真空室3的第三凹槽内,在室门4处于关闭状态时,起到密封的作用;进一步地,第三密封组件15包括第三密封圈,其一侧沿第三凹槽向外凸出,可抵在室门4表面,以保证真空室3的真空环境。
具体工作过程如下:
焊接开始前,处理待加工工件表面,将工件装夹好;
将工件运送到真空室,通过控制手柄调节运动机构,确定高压电子枪的焊接位置;
关闭真空室的室门,开启真空泵抽真空,获得0.05Pa真空度后开始焊接;
在操纵台调节高压电子枪的束流并确定焦点位置,并在观察窗窗口观察焊接状况;
运动机构带动高压电子枪移动,直至完成工件的焊接工作;
焊接完成后,释放真空,打开真空室,卸下工件,清理真空室。
其中:在执行抽真空操作时,还需要确定真空室室壁的厚度,防止真空室以及电子枪无法承受较大的压力,造成损坏;
具体地,针对筒形真空室,其壁厚的实际值以及标准值的计算公式如下:
S=S
其中,S—圆筒实际壁厚[mm];S
壁厚应力校核公式为:
其中,[p]—许用外压力[MPa];B—系数,图表法查表可知[MPa];D
计算得到的许用外压力应大于或等于实际外压力(0.1MPa),否则要增加壁厚,直至许用外压力符合要求为止。
本申请的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本申请中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离所述发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本申请中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
- 一种高压电子束焊机
- 一种电子束焊机高压稳压电源控制装置