一种可区分被树枝或其他果实遮挡苹果的识别方法
文献发布时间:2023-06-19 11:52:33
技术领域
本发明涉及基于人工智能算法的目标识别技术领域,特别涉及一种可区分被树枝或其他果实遮挡苹果的识别方法。
背景技术
苹果目标识别算法是苹果采摘机器人的核心技术之一,但现有的识别算法不能区分被树枝或其他果实遮挡的苹果,若此算法直接应用于采摘机器人,极有可能造成果实的损伤,或机械手、机械臂的损坏等不良后果。因此,实现对一幅苹果树图像中可采摘与不可采摘果实的区分识别,以避免不良后果的发生,是面向采摘机器人的苹果目标识别算法亟需解决的问题。
发明内容
本发明要解决的技术问题是:提供一种面向采摘机器人的可区分被树枝或其他果实遮挡苹果的识别方法。
为了解决上述问题,本发明给出以下技术方案:
一种可区分被树枝或其他果实遮挡苹果的识别方法,包含以下主要步骤:
1)对苹果图像进行二分类标注,完成YOLOv5s神经网络训练集数据制作;
2)YOLOv5s神经网络的目标类别参数设置为2;
3)使用训练集数据对YOLOv5s神经网络进行训练;
4)使用训练完成的YOLOv5s神经网络对被树枝或其他果实遮挡的苹果进行区分。
一种可区分被树枝或其他果实遮挡苹果的识别方法,所述的二分类标注包括:1)“可采摘苹果”类(含未被遮挡或被树叶部分遮挡的苹果);2)“不可采摘苹果”类(含被树枝或其他果实遮挡的苹果)。
本发明的有益效果在于:
1)提出了一种面向采摘机器人的苹果目标识别算法,在保证识别精度的同时,满足了机器人对果实实时识别的要求,平均识别速度达0.015s/幅。
2)所提出的苹果目标识别算法,可实现对一幅苹果树图像中可采摘与不可采摘果实的区分。
附图说明:
附图1:苹果图像二分类标注界面。
附图2:网络的目标类别参数设置为2的界面。
附图3:可采摘与不可采摘果实的区分结果界面。
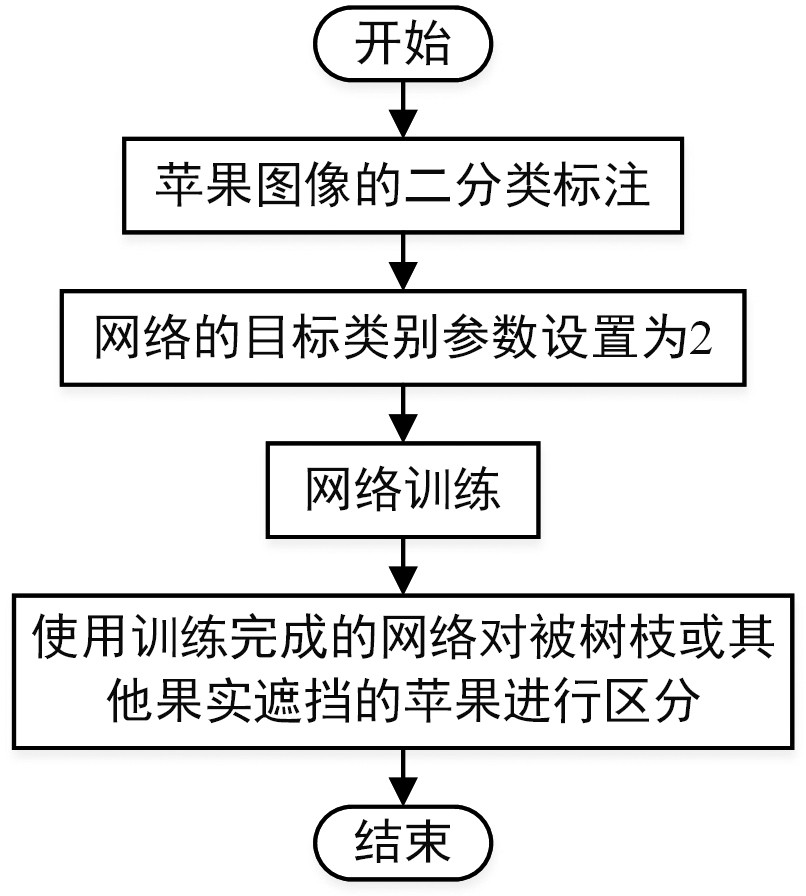
附图4:可区分被树枝或其他果实遮挡苹果的识别方法流程图。
具体实施方式:
下面结合附图和具体实施方式对本发明的方法作进一步详细说明。
一种可区分被树枝或其他果实遮挡苹果的识别方法,包含以下主要步骤:
1)如图1所示,利用LabelImg软件打开一幅苹果树图像,对苹果图像进行二分类标注。其中,将图像中未被遮挡或仅被树叶部分遮挡的苹果标注为“grasp-apple”类(可采摘苹果),将其他情况下的苹果标注为“apple”类(不可采摘苹果),保存标注后所生成的XML格式文件。对批量的图像进行上述的标注操作后,完成YOLOv5s神经网络训练集数据的制作。
2)如图2所示,打开YOLOv5s项目的“coco128.yaml”文件,将该文件中的“nc”参数设置为2,并将“names”参数更改为“grasp-apple”和“apple”。即完成了将YOLOv5s神经网络的目标类别参数设置为2的操作。
3)使用训练集数据对YOLOv5s神经网络进行训练。其中,训练数据集包含了二维苹果树图像数据和对应的已标注完成的XML文件。
4)使用训练完成的YOLOv5s神经网络对被树枝或其他果实遮挡的苹果进行区分。加载训练完成的苹果识别模型,对苹果树图像中的可采摘与不可采摘果实进行区分,区分结果的示例如图3所示,其中可采摘果实使用绿色预测框标识,不可采摘果实使用蓝色预测框标识。
一种可区分被树枝或其他果实遮挡苹果的识别方法,其流程图如图4所示,所述的二分类标注包括: “可采摘苹果”类(含未被遮挡或被树叶部分遮挡的苹果)、“不可采摘苹果”类(含被树枝或其他果实遮挡的苹果)。
由以上实施例可以看出,本发明设计了一种面向采摘机器人的苹果目标识别算法,具体的,该算法是一种可区分被树枝或其他果实遮挡苹果的识别方法。另一方面,该算法对200幅苹果树图像的平均检测精度为81.7%,平均识别速度达0.015s/幅(66.7 FPS),表明该算法在保证识别精度的同时,满足了机器人对果实实时识别的要求。所提出的苹果目标识别算法,可实现对一幅苹果树图像中可采摘与不可采摘果实的区分,从而为苹果采摘机器人的多果实目标实时精确识别提供技术支撑。
如上所述,结合附图、方法实施例所给出的方案内容,可以衍生出类似的技术方案。但凡是未脱离本技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单的修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
- 一种可区分被树枝或其他果实遮挡苹果的识别方法
- 一种重叠遮挡果实精确识别方法