基于多传感器数据手套的肌无力手指功能康复训练系统
文献发布时间:2023-06-19 11:52:33
技术领域
本发明涉及康复医疗设备技术领域,尤其是涉及一种基于多传感器数据手套的肌无力手指功能康复训练系统。
背景技术
手是人类用来与客观世界交互的重要器官,兼具生活自理、生产劳动和情感表达、思想交流的双重功能。但是因疾病、意外等因素造成的手功能受损也不在少数,比如手外伤和中风等。虽然以现如今蓬勃发展的医疗技术可以不断降低中风病人的死亡风险,但是其致残的后遗症仍然无法改变。根据康复理论和临床证明:患者在手术或药物治疗之后,接受合理的康复训练对于手部神经与肌肉的恢复能够达到很好的效果。
目前国内基于数据手套的主动式手功能康复训练系统并不多见,而且普通的数据手套只能检测手指运动的位置,而不能检测到手抓握的力度。
发明内容
为解决现有技术的不足,实现运动数据的检测,增强训练过程便捷性的目的,本发明采用如下的技术方案:
基于多传感器数据手套的肌无力手指功能康复训练系统,包括:手套、计算机和信号接收器,所述手套的手指部分设有可拉伸弯曲传感器,手掌部分设有惯性传感器,手套的内层设有柔性压力传感器,计算机与手套连接,进行实时数据传输;
所述可拉伸弯曲传感器,用于检测各个手指的弯曲状态;
所述惯性传感器,用于检测整个手掌的空间运动状态;
所述柔性压力传感器,用于检测手在抓握时各部位的压力值;
所述计算机,运用Unity3D软件构建虚拟现实环境,对各传感器的数据进行处理,并将之与虚拟手的运动状态等相关联,显示虚拟手与数据手套的实时同步,在所述虚拟现实环境中设计开发不同难度的训练,并对训练数据进行存储和处理;
所述信号传感器与计算机连接,用于接收传感器数据并传输给计算机。
进一步地,所述计算机,包括滤波器,对接收到各个传感器时间序列的数据,进行误差矫正和数据处理,将矫正后的数据与Unity 3D平台构建的虚拟手模型相耦合。
进一步地,所述滤波器,对可拉伸弯曲传感器、柔性压力传感器的数据进行滤波处理,最终选取滑动平均滤波法,工作过程如下:
1)将连续取得的N个采样值看成一个队列,队列的长度固定为N;
2)每次采样到一个新数据放入队尾,并扔掉原来队首的一个数据(先进先出原则);
3)将队列中的N个数据进行算术平均运算,获得新的滤波结果。
进一步地,所述滤波器,对惯性传感器测量得到的是xyz三方向上的加速度进行误差矫正,误差来源主要在传感器的系统误差和随机误差,系统误差主要来源于零位误差、标度因数误差和非正交误差,建立加速度误差模型:
其中,a
其中l为模型中的k
l
其中α
进一步地,所述计算机,包括关联模块,将传感器数据与虚拟手相关联,工作过程如下:
1)通过每个手指配备的可拉伸弯曲传感器,得到的是0-1000的传感器弯曲度,对应手指从紧握到完全舒展的运动状态,从而对应虚拟手的紧握与舒展;
2)通过误差矫正后的惯性传感器,得到的xyz三方向上的加速度数据,去除重力加速度影响后的矢量加速度,即为手的实际运动加速度,通过矢量加速度的微小时间的多重积分求出手运动的俯仰角和横滚角,对应到虚拟手的运动状态。
3)通过柔性压力传感器,测量得到的压力值,可以根据压力值的大小划分为一定的区间,并在虚拟手的对应部位用不同颜色来表示不同程度的压力。
患者通过虚拟交互,完成所需的康复训练内容,不同的传感器用以检测不同的运动数据,便于判断训练内容是否达到要求,穿戴式的设计以及辅助设计增强了训练过程的便捷性。
所述步骤2),通过计算机程序将手的运动状态表现到屏幕的虚拟手上,将所述俯仰角和横滚角乘以缩缓参数后,对应到虚拟手的运动状态,使手的运动在屏幕上放慢一些,为了不使虚拟手运动超出屏幕,添加运动位置边界及运动速度边界。
进一步地,所述计算机,包括康复训练开发模块,利用Unity3D平台构建所需的虚拟现实环境,采用C#语言完成具体的辅助训练设计与实现,在该模块中用户通过佩戴数据手套完成虚拟的交互,完成抓握、按压、移动、旋转等训练,并产生相应的训练数据,构建虚拟现实环境的过程如下:
1)制作虚拟手模型,能够完成手部基本动作,包括手指的弯曲舒展、各部位颜色的变换,以及移动旋转;
2)开发辅助训练,利用虚拟手的动作开发辅助训练,例如弹钢琴,每个手指控制一个琴键,手指弯曲到指定角度范围算判定成功;接苹果训练,移动手抓住空中随机落下的苹果;抓握球训练,患者带上手套之后抓握一个弹性球,通过抓握的力度对应训练中的一些判定动作。训练过后生成本次训练过程中的训练数据曲线图,判断是否达到训练效果;
3)训练其他模型及背景的设计应用;
4)运用unity 3D平台生成训练。
进一步地,所述柔性压力传感器,是将可导电丝线按照指定电路缝制在手套的布料上,并选取压阻材料覆盖在电路上。
进一步地,所述压缩材料是压阻薄膜,对于制造得到的不同压阻薄膜,使用压力机测量不同压力下不同点位的电阻值,测量薄膜厚度,选取电阻值一致、均匀的压阻薄膜。
进一步地,所述计算机,包括数据管理与存储模块,用于收集存储传感器的原始数据,计算机处理后的数据以及训练过程中产生的数据,在进行数据可视化等处理方式之后,将患者的训练情况更直观地展现出来。
所述可拉伸弯曲传感器,是弯曲软角位移传感器。
所述惯性传感器,是陀螺仪和加速度计。
所述手套与计算机之间数据通讯方式为串口通信,通过蓝牙进行数据传输。
本发明的优势和有益效果在于:
本发明基于一个将监测手指运动状态的可拉伸弯曲传感器、捕捉手掌空间运动状态的惯性传感器和检测手抓握力度的柔性压力传感器结合的数据手套,设计出的一套用户可以自主使用的智能康复训练系统,本发明对用户的训练数据进行实时显示和存储,以备医生对用户的康复训练反馈建议,同时降低康复训练的成本,使病人可以居家进行手功能康复训练,增强了康复训练过程中的便捷性,将患者的训练动作可视化,使手部训练的准确性得到提高,危险性低,稳定性和可操控性高。柔性压力传感器的引入解决了传统数据手套只能检测运动位置,不能检测手抓握时整个手各位置抓握力度的问题。
附图说明
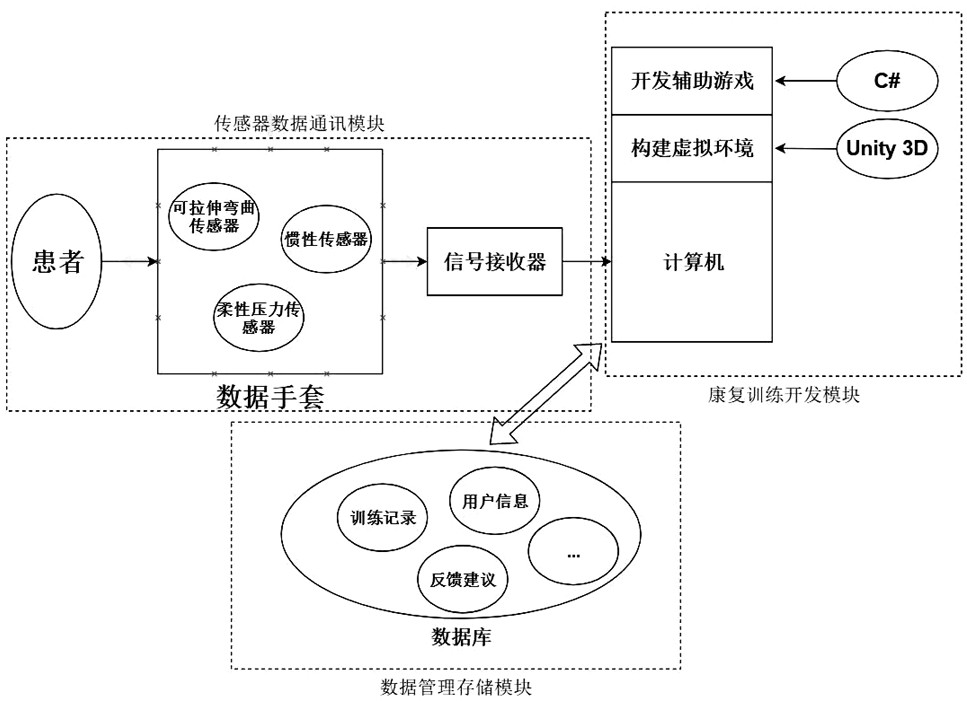
图1为本发明的系统框架图。
图2为本发明中柔性压力传感器电路图。
图3为本发明中柔性压力传感器感应点位图。
图4为本发明中柔性压力传感器对应点位压力值的实时显示图。
图5为本发明中数据手套与虚拟手的对应关系演示图。
具体实施方式
以下结合附图对本发明的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明,并不用于限制本发明。
如图1所示,一种基于多传感器数据手套的肌无力手指功能康复训练系统,包括新型数据手套,计算机和信号接收器。
数据手套包含监测手指运动状态的可拉伸弯曲传感器、捕捉手掌空间运动状态的惯性传感器和检测手抓握力度的柔性压力传感器,所述可拉伸弯曲传感器为弯曲软角位移传感器,安装在各个手指上,用以检测手抓握时各个手指的弯曲状态,惯性传感器安装在手掌上,当手移动或旋转时陀螺仪传感信号发生改变,可检测出整个手的运动状态,柔性压力传感器是在数据手套的内层布料上按照如图2所示的电路,缝制可导电丝线,并选取合适的压阻材料制作均匀厚度的压阻薄膜覆盖在电路的如图3所示的指定位置上,可以检测手部抓握时手部各部位的压力值,压力值可以实时显示,如图4所示。
计算机通过数据接收器接收到三种传感器的实时数据,接收到的串口数据是各个传感器数据的时间序列,计算机对接收到的护具进行误差矫正和数据处理,将矫正后的数据与Unity3D平台建立的虚拟手模型相耦合,在康复训练开发模块完成数据手套与虚拟手的运动同步。
具体地,将惯性传感器的加速度数据结合重力场得到整个手运动的俯仰角和横滚角,将所得旋转角度和运动的速度方向等与虚拟手运动状态相关联,将处理后的弯曲传感器的数据与各个手指的手指弯曲程度相关联,将各个点位柔性压力传感器的数值与虚拟手手指上相应点位相关联,将不同压力状态下手指以不同的颜色显示,如图5所示。
在康复训练开发模块中,利用Unity3D平台构建所需的虚拟现实环境,采用C#语言完成具体的辅助训练设计与实现,在该模块中用户通过佩戴数据手套完成虚拟的交互,完成抓握,按压,移动,旋转等训练,并产生相应的训练数据。
在数据管理与存储模块,系统收集存储传感器的原始数据,计算机处理后的数据以及训练过程中产生的数据,在进行数据可视化等处理方式之后,将患者的训练情况更直观地展现出来。
本发明提供的一种基于多传感器数据手套的肌无力手指功能康复训练系统降低了康复训练成本,使病人可以居家进行手功能康复训练,增强了康复训练过程中的便捷性,将患者的训练动作可视化,使手部训练的准确性得到提高,危险性低,稳定性和可操控性高。
以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明实施例技术方案的范围。
- 基于多传感器数据手套的肌无力手指功能康复训练系统
- 一种基于光纤弯曲传感器的数据手套及交互系统