一种智能物流自动搬运机器人
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及物流领域,特别涉及一种智能物流自动搬运机器人。
背景技术
我国物流业持续高速发展,对于各类内部处理设备的需求和要求不断增加和提高,物流设备是物流技术水平高低的主要标志,现代物流设备体现了现代物流技术的发展,我国斤近年来的物流设备现代化、自动化程度较高,其特点主要表现在:设备的社会化程度越来越高,设备结构越来越复杂,并形成物流和物流输送设备的逐步配套,实现了利用自动导航运输车(AGV)按规定的路径形式,具有移载功能的运输设备。
自动导航运输车也就是智能物流机器人,它是一种自动导航移动机器人,是集环境感知、动态决策与规划、行为控制与执行等多功能于一体的可移动的物流搬运装备,一般由:导航系统、车载计算机系统、车载控制系统、直流调速驱动及转向控制系统、安全警示系统、蓄电池供电充电系统、机械车体等部分组成,该物流机器人的核心技术是自主导航技术,它是以地面部署的二维条码作为参考坐标点,并与惯性导航模块信息融合进行组合定位导航,通过WiFi与总控系统通讯,动态规划行走路径,该物流机器人集成了激光、视觉识别、惯性导航、WiFi等多种先进技术的高度智能化的智能物流装备。
在现有的搬运机器人中,采用的AGV技术可以进行移动和搬运等操作,但是在卸载货物时易导致货物翻倒,若包装不好极易造成内部货物损坏;同时在转运货架时,货架容易晃动,存在货物掉落的风险,使用效果不佳。
发明内容
本发明要解决的技术问题是克服现有技术的缺陷,提供一种智能物流自动搬运机器人。
为了解决上述技术问题,本发明提供了如下的技术方案:
本发明一种智能物流自动搬运机器人,包括机器底座,所述机器底座的前端底部设置有前挡板,所述机器底座的前端设置有距离探测模组,所述机器底座的后端两侧均设置有旋转防撞轮,所述机器底座的顶端表面前端安装有机箱,所述机箱的外侧表面安装有显示屏,所述显示屏的底部设置有控制面板,所述机箱的顶部安装有支撑架,所述支撑架的内部安装有垂直升降机构,所述垂直升降机构的滑动平台一侧安装有机械手,所述机械手的顶部安装有摄像头,所述垂直升降机构的顶端安装有信号指示灯,所述机箱的一侧设置有液压翻转卸货平台,所述液压翻转卸货平台包括台面、旋转支座、固定座和第一液压杆,所述台面的底端一侧与旋转支座相铰接,所述台面的底端另一侧压覆于固定座的顶端,所述台面底端靠近固定座的一端两侧均转动连接有第一液压杆,且第一液压杆的另一端通过转轴设置在机器底座的顶端表面,所述台面的长边两侧均安装有电动推杆,所述台面偏向旋转支座的顶端处开有滑槽,且滑槽的两侧向机箱的一侧延伸,所述滑槽的内部卡嵌有抵靠板,所述滑槽的外侧连通有限位槽,所述限位槽的内部卡嵌有滑动板,所述滑动板的一侧与抵靠板固定连接,所述滑动板的另一侧与电动推杆的活塞杆顶端传动连接,所述台面的表面开有容槽,所述容槽的内部设置有升降顶起平台。
作为本发明的一种优选技术方案,所述垂直升降机构包括滑台、丝杆、底板、电机和滑动块,所述滑台的内部竖直安装有丝杆,所述丝杆的外部套接有滑动块,所述滑台的底端设置有底板,且底板横向嵌于支撑架的内部,所述底板的底部设置有电机,且电机的输出轴与丝杆传动连接。
作为本发明的一种优选技术方案,所述旋转支座的数量为二,并安装于机器底座的顶端末尾两侧,所述固定支座的数量为二,并安装于机器底座的顶端表面两侧,且靠近机箱设置。
作为本发明的一种优选技术方案,所述升降顶起平台包括支撑板、交叉升降架和第二液压杆,所述支撑板的底端安装有交叉升降架,所述交叉升降架的内侧安装有第二液压杆,所述交叉升降架位于第一液压杆之间。
作为本发明的一种优选技术方案,所述支撑板的表面积小于容槽的开口面积,所述支撑板的表面设置有防滑纹。
作为本发明的一种优选技术方案,所述机器底座的内部安装有导向机构,所述距离探测模组与导向机构电信号连接,所述机箱的内部设置有PLC,所述显示屏、控制面板、垂直升降机构、机械手、摄像头、信号指示灯、液压翻转卸货平台、电动推杆和升降顶起平台均与PLC电信号连接。
与现有技术相比,本发明的有益效果如下:
本发明通过垂直升降机构调整机械手的位置,当转移货架时可通过机械手准确对货架侧边栏杆进行锁紧,从而在转运过程可有效维持平稳;同时通过将抵靠板向外侧延伸,将台面翻转过后抵靠板可提供滑行距离,从而使转运的货物平稳落地,避免造成损坏。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
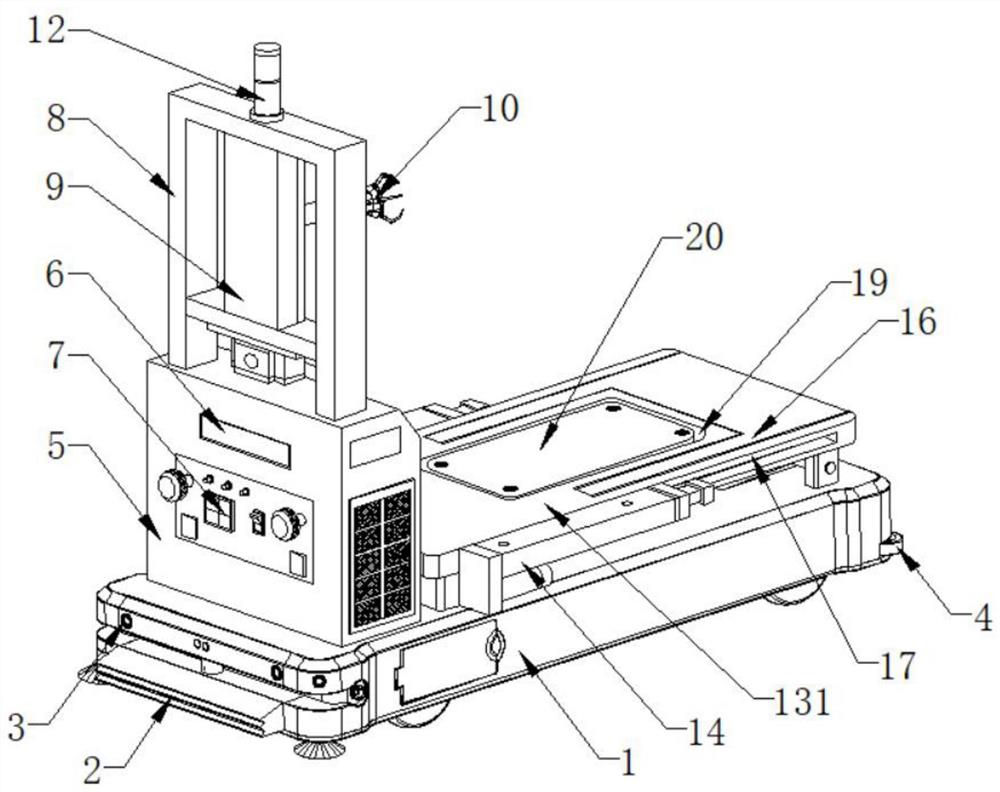
图1是本发明的整体结构示意图;
图2是本发明的垂直升降机构结构示意图;
图3是本发明的机械手部分结构示意图;
图4是本发明的台面部分结构纵向截面图;
图5是本发明的台面部分结构横向截面图;
图6是本发明的液压翻转卸货平台结构示意图;
图7是本发明的升降顶起平台结构示意图;
图8是本发明的液压翻转卸货平台和升降顶起平台组装时示意图;
图中:1、机器底座;2、前挡板;3、距离探测模组;4、旋转防撞轮;5、机箱;6、显示屏;7、控制面板;8、支撑架;9、垂直升降机构;10、机械手;11、摄像头;12、信号指示灯;13、液压翻转卸货平台;14、电动推杆;15、滑槽;16、抵靠板;17、限位槽;18、滑动板;19、容槽;20、升降顶起平台;131、台面;132、旋转支座;133、固定座;134、第一液压杆;91、滑台;92、丝杆;93、底板;94、电机;95、滑动块;201、支撑板;202、交叉升降架;203、第二液压杆。
具体实施方式
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
实施例1
如图1-8所示,本发明提供一种智能物流自动搬运机器人,包括机器底座1,机器底座1的前端底部设置有前挡板2,机器底座1的前端设置有距离探测模组3,机器底座1的后端两侧均设置有旋转防撞轮4,机器底座1的顶端表面前端安装有机箱5,机箱5的外侧表面安装有显示屏6,显示屏6的底部设置有控制面板7,机箱5的顶部安装有支撑架8,支撑架8的内部安装有垂直升降机构9,垂直升降机构9的滑动平台一侧安装有机械手10,机械手9的顶部安装有摄像头11,垂直升降机构8的顶端安装有信号指示灯12,机箱5的一侧设置有液压翻转卸货平台13,液压翻转卸货平台13包括台面131、旋转支座132、固定座133和第一液压杆134,台面131的底端一侧与旋转支座132相铰接,台面131的底端另一侧压覆于固定座133的顶端,台面131底端靠近固定座133的一端两侧均转动连接有第一液压杆134,且第一液压杆134的另一端通过转轴设置在机器底座1的顶端表面,台面131的长边两侧均安装有电动推杆14,台面131偏向旋转支座132的顶端处开有滑槽15,且滑槽15的两侧向机箱5的一侧延伸,滑槽15的内部卡嵌有抵靠板16,滑槽15的外侧连通有限位槽17,限位槽17的内部卡嵌有滑动板18,滑动板18的一侧与抵靠板16固定连接,滑动板18的另一侧与电动推杆14的活塞杆顶端传动连接,台面131的表面开有容槽19,容槽19的内部设置有升降顶起平台20。
进一步的,垂直升降机构9包括滑台91、丝杆92、底板93、电机94和滑动块95,滑台91的内部竖直安装有丝杆92,丝杆92的外部套接有滑动块95,滑台91的底端设置有底板93,且底板93横向嵌于支撑架8的内部,底板93的底部设置有电机94,且电机94的输出轴与丝杆92传动连接。
旋转支座132的数量为二,并安装于机器底座1的顶端末尾两侧,固定支座133的数量为二,并安装于机器底座1的顶端表面两侧,且靠近机箱5设置。
升降顶起平台20包括支撑板201、交叉升降架202和第二液压杆203,支撑板201的底端安装有交叉升降架202,交叉升降架202的内侧安装有第二液压杆203,交叉升降架202位于第一液压杆134之间。
支撑板201的表面积小于容槽19的开口面积,支撑板201的表面设置有防滑纹。
机器底座1的内部安装有导向机构,距离探测模组3与导向机构电信号连接,机箱5的内部设置有PLC,显示屏6、控制面板7、垂直升降机构9、机械手10、摄像头11、信号指示灯12、液压翻转卸货平台13、电动推杆14和升降顶起平台20均与PLC电信号连接。
具体的,通过利用AGV技术,使机箱5内部控制系统对机器人进行智能操控,实现机器人将货物移动至指定的位置(为现有技术,故在此不赘述);距离探测模组3检测机器人前方的距离,将信号传递至机器底座1内部的导向机构,控制机器人行走避障,显示屏6可显示机器人的信息,通过控制面板7实现对机器人进行控制,信号指示灯12可显示机器人当前状态信息;将货架进行转运时,机器人后端移动至货架的底端,第二液压杆203推动交叉升降架202,使交叉升降架202将支撑板201从容槽19内向上顶起,从而从货架的底端将货架托起,之后摄像头11检测货架侧边栏杆的位置,将信号反馈至机箱5内操作系统,电机94工作带动丝杆92转动,使滑动块95可上下调节位置,当机械手10移动至货架侧边栏杆的位置后,机械手10收拢实现对货架进行锁定,从而在转移货架的过程中维持稳定;当台面131上的装载有普通货物需要卸载时,电动推杆14的活塞杆向外伸出,带动滑动板18在限位槽17向后端移动,滑动板18带动抵靠板16在滑槽15的内部向后端移动,滑动板18伸出过后,第一液压杆134将台面131以旋转支座132位支点向外侧进行翻转,此时台面131上的货物则沿着倾斜的抵靠板16向下滑落完成卸货,可有效避免货物直接掉落造成损坏。
本发明通过垂直升降机构调整机械手的位置,当转移货架时可通过机械手准确对货架侧边栏杆进行锁紧,从而在转运过程可有效维持平稳;同时通过将抵靠板向外侧延伸,将台面翻转过后抵靠板可提供滑行距离,从而使转运的货物平稳落地,避免造成损坏。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种智能物流自动搬运机器人
- 一种智能物流自动搬运机器人