运送系统以及运送管理服务器、飞行体、行驶体
文献发布时间:2023-06-19 11:54:11
技术领域
本发明涉及运送系统以及运送管理服务器、飞行体、行驶体。
背景技术
专利文献1(日本特开2017-185866号公报)公开了一种能与一般的载人用车同样地在道路中行驶并且能在空中飞行的空陆两用交通工具。
上述专利文献1的空陆两用交通工具的空路(空中路线)中的续航距离短。
发明内容
本发明的目的在于提供一种改善空路中的续航距离的技术。
根据本申请发明的第一观点,提供一种运送系统,包括:飞行体,能在空路中飞行且能供运送对象者搭乘;行驶体,能在陆路中行驶且能与所述飞行体连结;以及运送管理服务器,能与所述飞行体和所述行驶体通信,所述行驶体被配置为能在连结有所述飞行体的状态下和从所述飞行体分离的状态下在所述陆路中行驶,所述飞行体被配置为在从所述行驶体分离的状态下在所述空路中飞行,其中,所述运送管理服务器包括:飞行信息获取部,获取包含所述飞行体的着陆预定地的飞行信息;以及着陆预定地车辆调度部,向所述着陆预定地调度未连结有所述飞行体的所述行驶体。根据以上的构成,空路中的续航距离被改善。
优选的是,所述运送管理服务器还包括:出发信息获取部,获取包含所述运送对象者的出发地的出发信息;以及出发地车辆调度部,向所述出发地调度连结有所述飞行体的所述行驶体。根据以上的构成,运送对象者不换乘就能搭乘于飞行体。
优选的是,所述行驶体在连结有所述飞行体的状态下从所述出发地行驶至所述飞行体的起飞预定地。根据以上的构成,行驶体能行驶至合适的起飞预定地。
优选的是,所述行驶体在连结有所述飞行体的状态下从所述着陆预定地行驶至所述运送对象者的目的地。根据以上的构成,运送对象者不换乘就能到达目的地。
优选的是,所述行驶体能在所述陆路中自主行驶。
优选的是,所述飞行体能在所述空路中自主飞行。
优选的是,所述飞行体被配置为由能充电的电池驱动,所述行驶体被配置为能在与所述飞行体连结的状态下对所述飞行体的所述电池进行充电,所述飞行信息包含所述飞行体要临时着陆来对所述飞行体的所述电池进行充电的临时着陆预定地,所述临时着陆预定地是所述运送对象者的出发地与所述着陆预定地之间的地点,所述运送系统还包括临时着陆预定地车辆调度部,该临时着陆预定地车辆调度部向所述临时着陆预定地调度未连结有所述飞行体的所述行驶体。根据以上的构成,能实质上延长飞行体的续航距离。
优选的是,所述行驶体一边对所述飞行体的所述电池进行充电一边从所述临时着陆预定地朝向所述运送对象者的目的地行驶。根据以上的构成,能利用充电时间使行驶体朝向运送对象者的目的地靠近。
根据本申请发明的第二观点,提供一种运送管理服务器,能与飞行体和行驶体通信,所述飞行体能在空路中飞行且能供运送对象者搭乘,所述行驶体能在陆路中行驶且能与所述飞行体连结,其中,所述行驶体被配置为能在连结有所述飞行体的状态下和从所述飞行体分离的状态下在所述陆路中行驶,所述飞行体被配置为在从所述行驶体分离的状态下在所述空路中飞行,所述运送管理服务器包括:飞行信息获取部,获取包含所述飞行体的着陆预定地的飞行信息;以及着陆预定地车辆调度部,向所述着陆预定地调度未连结有所述飞行体的所述行驶体。根据以上的构成,空路中的续航距离被改善。
根据本申请发明的第三观点,提供一种飞行体,具有:连结部,能与行驶体连结,所述行驶体能在陆路中行驶且能与运送管理服务器通信;以及通信部,能与所述运送管理服务器通信,所述飞行体能在搭乘有运送对象者的状态下在空路中飞行,其中,所述通信部向所述运送管理服务器发送着陆预定地,该着陆预定地是所述飞行体在未与所述行驶体连结的状态下飞行后要着陆的预定地,所述连结部在所述飞行体飞行至所述着陆预定地后与所述行驶体连结。
根据本申请发明的第四观点,提供一种行驶体,能与飞行体连结,所述飞行体能与运送管理服务器通信且能在搭乘有运送对象者的状态下在空路中飞行,所述行驶体能在连结有所述飞行体的状态下和从所述飞行体分离的状态下在陆路中行驶且具有能与所述运送管理服务器通信的通信部,其中,所述行驶体还具备控制部,该控制部基于来自所述通信部的飞行信息来控制所述行驶体的行驶,所述飞行信息包含着陆预定地,该着陆预定地是从所述行驶体分离的状态的所述飞行体要着陆的预定地,所述通信部从所述运送管理服务器获取所述飞行信息,所述控制部基于所述飞行信息来使所述行驶体向所述着陆预定地行驶。
根据本发明,空路中的续航距离被改善。
根据下文给出的详细说明和附图,本公开的上述和其他的目的、特征以及优点将变得更加清楚,其中,附图仅作为示例给出,因此不应被认为是限制本公开。
附图说明
图1是下一代型出租车的立体图。
图2是表示飞行体从行驶体起飞或向行驶体着陆的情形的立体图。
图3是运送系统的功能框图。
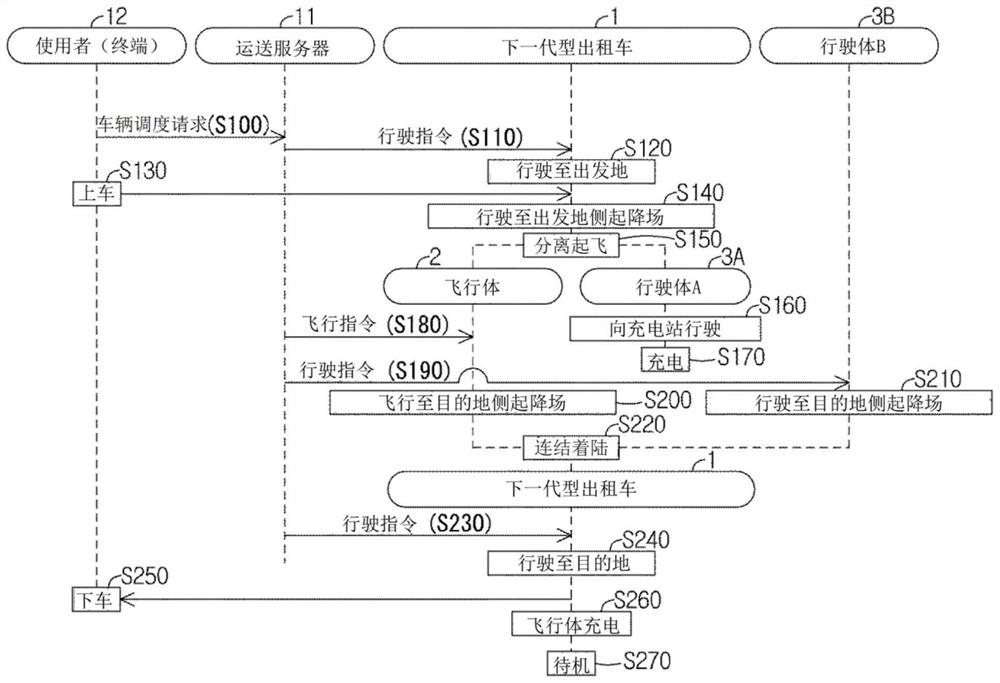
图4是运送系统的控制流程。(第一实施方式)
图5是运送系统的控制流程。(第二实施方式)
图6是运送系统的控制流程。(第二实施方式)
具体实施方式
(第一实施方式)
以下,参照图1至图4,对本发明的第一实施方式进行说明。
在图1中示出了下一代型出租车1。下一代型出租车1是下一代型移动体的一个具体例,用于实现下一代型运送服务。下一代型出租车1由飞行体2和行驶体3构成。
飞行体2被配置为能在任意的空路中自主飞行且能供使用者(运送对象者)搭乘。具体而言,飞行体2至少包括:座舱4,提供用于供使用者搭乘的搭乘空间;多个螺旋桨(propeller)5,用于使座舱4漂浮并且使座舱4在空中水平移动;以及未图示的马达,驱动多个螺旋桨5旋转。飞行体2还包括连结部2a。连结部2a是能与行驶体3连结的部分。
行驶体3被设为能在陆路6中行驶且能与飞行体2连结。具体而言,行驶体3包括:主体7,能搭载飞行体2;多个车轮8,装配于主体7;以及未图示的马达,驱动多个车轮8旋转。陆路6包括铺装道路或未铺装道路。行驶体3的主体7被配置为能与飞行体2的连结部2a连结。
在图2中示出了飞行体2要与行驶体3连结或者已从行驶体3分离的情形。
行驶体3被配置为能在连结有飞行体2的状态下和从飞行体2分离的状态下在陆路6中行驶。
相对于此,飞行体2被配置为在从行驶体3分离的状态下在空路中飞行。由此,与飞行体2和行驶体3成为一体地在空路中飞行的情况相比,能大幅延长飞行体2的续航距离。此外,飞行体2通过与行驶体3连结而能实质上在陆路6中行驶。因此,特别是在像市区那样飞行体2能起降的场所有限的情况下,飞行体2能实质上在陆路6中行驶这一点在尽可能地靠近使用者的目的地这一意义上是有益的。
本实施方式所提供的下一代型运送服务概略如下。
使用者通过自身所拥有的终端来请求下一代型出租车1的车辆调度。于是,下一代型出租车1被调度至使用者的当前所在地。下一代型出租车1在使用者搭乘后向最近的起降场行驶。在下一代型出租车1到达起降场后,飞行体2从行驶体3分离并起飞。然后,飞行体2飞行至距使用者的目的地最近的起降场。在起降场预先配备有行驶体3,飞行体2通过与所配备的行驶体3连结而着陆。通过飞行体2与行驶体3连结而再次构成下一代型出租车1。下一代型出租车1行驶至使用者的目的地。在下一代型出租车1到达目的地后,使用者从下一代型出租车1下车。这样,使用者能保持着搭乘于同一飞行体2的状态从出发地直到目的地而完全不换乘交通工具。此外,由于下一代型运送服务在从出发地至目的地的移动路径中包括空路,因此使用者能在极短时间内从出发地移动至目的地。
接着,参照图3,对实现下一代型运送服务的运送系统10进行说明。如图3所示,运送系统10包括:运送服务器11(运送管理服务器)、至少一个飞行体2以及至少一个行驶体3。运送系统10还可以包括作为使用者所使用的便携终端的终端12。在本实施方式中,至少一个行驶体3包括行驶体3A和行驶体3B。行驶体3A是配备于使用者的出发地附近的行驶体3。行驶体3B是配备于使用者的目的地附近的行驶体3。
运送服务器11具备:作为中央运算处理器的CPU(Central Processing Unit:中央处理器)、读写自由的RAM(Random Access Memory:随机存取存储器)以及读出专用的ROM(Read Only Memory:只读存储器)。并且,CPU读出并执行存储于ROM的程序,由此程序使CPU等硬件作为出发管理部13、飞行管理部14、到达管理部15发挥功能。
终端12典型地是智能手机、平板电脑,具备作为中央运算处理器的CPU、读写自由的RAM以及读出专用的ROM。并且,CPU读出并执行存储于ROM的程序,由此程序使CPU等硬件作为车辆调度请求部16发挥功能。
飞行体2具备:作为中央运算处理器的CPU(Central Processing Unit)、读写自由的RAM(Random Access Memory)以及读出专用的ROM(Read Only Memory)。并且,CPU读出并执行存储于ROM的程序,由此程序使CPU等硬件作为自主飞行控制部17发挥功能。飞行体2还包括能充电的电池18。自主飞行控制部17通过来自电池18的电力供给来驱动未图示的马达,由此使飞行体2自主飞行。在本实施方式中,自主飞行控制部17兼作能与运送服务器11双向通信的通信部。
行驶体3A具备:作为中央运算处理器的CPU(Central Processing Unit)、读写自由的RAM(Random Access Memory)以及读出专用的ROM(Read Only Memory)。并且,CPU读出并执行存储于ROM的程序,由此程序使CPU等硬件作为自主行驶控制部19发挥功能。行驶体3A还包括能充电的电池20。电池20的放电容量比电池18的放电容量大。自主行驶控制部19通过来自电池20的电力供给来驱动未图示的马达,由此使行驶体3A自主行驶。在本实施方式中,自主行驶控制部19兼作能与运送服务器11双向通信的通信部。
行驶体3B是与行驶体3A相同的构成,因此省略其说明。
需要说明的是,行驶体3也可以搭载使用化石燃料、氢燃料、太阳光的发电机。行驶体3也可以使用发电机对电池20进行充电。自主行驶控制部19也可以通过来自发电机的电力供给来驱动未图示的马达,由此使行驶体3自主行驶。
(终端12)
车辆调度请求部16向运送服务器11发送车辆调度请求信息。车辆调度请求信息包含使用者的出发地和使用者的目的地。车辆调度请求信息还可以包含预定出发时刻、希望到达时刻、终端ID、使用者ID、结算方法中的任一个或多个。出发地可以设为终端12的当前位置或通过来自使用者的输入而指定的地点。车辆调度请求部16可以使用终端12所具备的GPS(Global Positioning System:全球定位系统)接收器来获取终端12的当前位置。
(运送服务器11)
出发管理部13基于从终端12接收到的车辆调度请求信息来管理下一代型运送系统的出发阶段。出发阶段是指从终端12接收到车辆调度请求信息起至飞行体2起飞为止的阶段。
飞行管理部14基于从终端12接收到的车辆调度请求信息来管理下一代型运送系统的飞行阶段。飞行阶段是指从飞行体2起飞起至着陆为止的阶段。
到达管理部15基于从终端12接收到的车辆调度请求信息来管理下一代型运送系统的到达阶段。到达阶段是指从飞行体2着陆起至使用者到达目的地为止的阶段。
(飞行体2)
自主飞行控制部17控制飞行体2的自主飞行。自主飞行控制部17基于来自飞行管理部14的飞行指令信息来控制飞行体2的自主飞行。飞行指令信息至少包含飞行体2要着陆的起降场。飞行指令信息可以包含:飞行体2的飞行路线、飞行体2的飞行速度、飞行体2的飞行高度、当前或未来的气象条件。飞行指令信息还可以包含:在飞行路线上恐怕会干扰本机的其他飞行体的飞行路线、飞行速度、飞行高度、当前所在地。
(行驶体3A)
自主行驶控制部19控制行驶体3A的自主行驶。自主行驶控制部19基于来自出发管理部13或到达管理部15的行驶指令信息来控制行驶体3A的自主行驶。行驶指令信息至少包含行驶体3A的出发地和目的地。行驶指令信息可以包含行驶体3A的行驶路线。自主行驶控制部19可以基于行驶指令信息来生成行驶体3A的最佳行驶路线。
运送服务器11、终端12、飞行体2、各行驶体3例如能通过互联网进行双向通信。
接着,参照图4,对运送系统10的控制流程进行说明。
首先,使用者在使用下一代型运送服务时,启动预先安装于终端12的车辆调度应用程序,在车辆调度应用程序上输入出发地和目的地。使用者可以指定当前位置作为出发地,也可以指定所希望的地点作为出发地。于是,终端12向运送服务器11发送车辆调度请求信息(S100)。
当接收到车辆调度请求信息时,出发管理部13通过参照存储于ROM的地图信息来检索并确定距使用者的出发地最近的起降场。此外,出发管理部13搜索并决定从使用者的出发地至上述所确定的起降场的行驶路线。然后,出发管理部13向下一代型出租车1发送行驶指令信息(S110)。行驶指令信息包含使用者的出发地和上述所确定的起降场。上述所确定的起降场是供飞行体2起飞的预定的起降场、即出发地侧的起降场。以下,出发地侧的起降场也称为出发地侧起降场。行驶指令信息可以包含上述所决定的行驶路线。
下一代型出租车1通过基于行驶指令信息的由自主行驶控制部19进行的自主控制而自主行驶至使用者的出发地(S120)。
在下一代型出租车1到达使用者的出发地后,使用者搭乘于下一代型出租车1(S130)。然后,下一代型出租车1通过基于行驶指令信息的由自主行驶控制部19进行的自主控制而保持着载有使用者的状态自主行驶至出发地侧起降场(S140)。
在下一代型出租车1到达出发地侧起降场后,飞行体2通过由自主飞行控制部17进行的自主控制而保持着载有使用者的状态从行驶体3分离并起飞(S150)。
从飞行体2分离的行驶体3A通过由自主行驶控制部19进行的自主控制而向最近的充电站自主行驶(S160),执行电池20的充电(S170)。
另一方面,飞行管理部14基于车辆调度请求信息来生成飞行指令信息,并向飞行体2发送飞行指令信息(S180)。飞行指令信息包含飞行体2要着陆的起降场、即目的地侧的起降场。以下,目的地侧的起降场也称为目的地侧起降场。飞行管理部14典型地将距车辆调度请求信息中所包含的目的地最近的起降场决定为目的地侧起降场。但是,飞行管理部14也可以取而代之地将到车辆调度请求信息中所包含的目的地的所需时间最短的起降场决定为目的地侧起降场。除此之外,飞行管理部14也可以考虑目的地的天气、目的地附近的道路拥堵状况来决定目的地侧起降场。
此外,飞行管理部14向行驶体3B发送行驶指令信息(S190)。具体而言,飞行管理部14向在目的地侧起降场的附近待机的多个行驶体3中的任一个发送行驶指令信息。飞行管理部14可以将在目的地侧起降场的附近待机的多个行驶体3中的到目的地侧起降场的所需时间最短的行驶体3设为行驶体3B,也可以将电池20的放电容量最大的行驶体3设为行驶体3B。行驶指令信息至少包含行驶体3B的目的地。在此,行驶体3B的目的地设为目的地侧起降场。
然后,飞行体2通过基于飞行指令信息的自主飞行控制部17的自主控制而自主飞行至目的地侧起降场(S200)。此外,行驶体3B通过基于行驶指令信息的自主行驶控制部19的自主控制而自主行驶至目的地侧起降场(S210)。优选的是,行驶体3B以在飞行体2到达目的地侧起降场之前到达目的地侧起降场的方式朝向目的地侧起降场自主行驶。
然后,当飞行体2到达目的地侧起降场时,飞行体2通过如图2所示地与已经在目的地侧起降场待机的行驶体3B连结而着陆(S220)。由此,飞行体2和行驶体3B再次构成下一代型出租车1。
接着,到达管理部15向下一代型出租车1发送行驶指令信息(S230)。行驶指令信息至少包含使用者的目的地。行驶指令信息可以包含行驶体3B的行驶路线。自主行驶控制部19可以基于行驶指令信息来生成行驶体3B的最佳行驶路线。
然后,下一代型出租车1通过基于行驶指令信息的由自主行驶控制部19进行的自主控制而自主行驶至使用者的目的地(S240)。在下一代型出租车1到达使用者的目的地后,使用者从下一代型出租车1下车(S250)。之后,行驶体3B对连结于行驶体3B的飞行体2的电池18进行充电(S260),并且待机直至重新出现使用者(S270)。
以上,对第一实施方式进行了说明,上述实施方式具有以下的特点。
运送系统10包括:飞行体2,能在空路中飞行且能供使用者(运送对象者)搭乘;行驶体3,能在陆路6中行驶且能与飞行体2连结;以及运送服务器11(运送管理服务器),能与飞行体2和行驶体3通信。行驶体3被配置为能在连结有飞行体2的状态下和从飞行体2分离的状态下在陆路6中行驶。飞行体2被配置为在从行驶体3分离的状态下在空路中飞行。飞行管理部14(飞行信息获取部)生成并获取包含目的地侧起降场(飞行体2的着陆预定地)的飞行指令信息(飞行信息)。飞行管理部14(着陆预定地车辆调度部)向目的地侧起降场调度未连结有飞行体2的行驶体3(S190)。根据以上的构成,飞行体2的空路中的续航距离被改善。
出发管理部13(出发信息获取部)获取包含使用者的出发地的车辆调度请求信息(出发信息)。出发管理部13(出发地车辆调度部)向使用者的出发地调度连结有飞行体2的行驶体3。根据以上的构成,使用者不换乘就能搭乘于飞行体2。
行驶体3在连结有飞行体2的状态下从出发地行驶至出发地侧起降场(飞行体2的起飞预定地)(S140)。根据以上的构成,行驶体3能行驶至合适的起飞预定地。
行驶体3在连结有飞行体2的状态下从目的地侧起降场(着陆预定地)行驶至使用者的目的地(S240)。根据以上的构成,使用者不换乘就能到达目的地。
此外,飞行体2具有:连结部2a,能与行驶体3连结,所述行驶体3能在陆路中行驶且能与运送服务器11(运送管理服务器)通信;以及自主飞行控制部17(通信部),能与运送服务器11通信。飞行体2能在搭乘有使用者(运送对象者)的状态下在空路中飞行。自主飞行控制部17可以向运送服务器11发送着陆预定地,该着陆预定地是飞行体2在未与行驶体3连结的状态下飞行后要着陆的预定地。连结部2a可以在飞行体2飞行至着陆预定地后与行驶体3连结。
此外,行驶体3能与飞行体2连结。飞行体2能与运送服务器11(运送管理服务器)通信且能在搭乘有使用者(运送对象者)的状态下在空路中飞行。行驶体3能在连结有飞行体2的状态下和从飞行体2分离的状态下在陆路中行驶。行驶体3可以具有能与运送服务器11通信的自主行驶控制部19(通信部)。行驶体3还可以具备基于来自自主行驶控制部19的飞行信息来控制行驶体3的行驶的控制部。在本实施方式中,自主行驶控制部19可以兼作该控制部。飞行信息包含着陆预定地,该着陆预定地是从行驶体3分离的状态的飞行体2要着陆的预定地。自主行驶控制部19可以从运送服务器11获取飞行信息。自主行驶控制部19可以基于飞行信息来使行驶体3向着陆预定地行驶。
(第二实施方式)
接着,参照图5和图6,对本发明的第二实施方式进行说明。以下,以本实施方式与上述第一实施方式不同的点为中心进行说明,省略重复的说明。
本实施方式所提供的下一代型运送服务概略如下。
在本实施方式中,在飞行体2从出发地侧起降场飞行至目的地侧起降场时,通过在其空路的中途着陆一次并与行驶体3连结来对飞行体2的电池18进行充电,之后飞行体2再次从行驶体3分离并起飞,朝向目的地侧起降场再次开始飞行。据此,能实质上延长飞行体2的空路中的续航距离。
因此,在本实施方式中,至少一个行驶体3包括行驶体3A、行驶体3B以及行驶体3C。行驶体3A是配备于使用者的出发地附近的行驶体3。行驶体3C是配备于使用者的目的地附近的行驶体3。行驶体3B是配备于使用者的出发地与目的地之间的任意地点的行驶体3,在本实施方式中具有对飞行体2的电池18进行充电的作用。
接着,参照图5和图6,对运送系统10的控制流程进行说明。其中,在图5中,步骤S100至步骤S170与第一实施方式相同,因此省略其说明。
飞行管理部14向飞行体2发送飞行指令信息(S180)。飞行指令信息至少包含飞行体2要临时着陆来进行充电的起降场。以下,也将飞行体2要临时着陆来进行充电的起降场称为充电开始侧起降场。
此外,飞行管理部14向行驶体3B发送行驶指令信息(S190)。具体而言,飞行管理部14向在充电开始侧起降场的附近待机的多个行驶体3中的任一个发送行驶指令信息。飞行管理部14可以将在充电开始侧起降场的附近待机的多个行驶体3中的到充电开始侧起降场的所需时间最短的行驶体3设为行驶体3B,也可以将电池20的放电容量最大的行驶体3设为行驶体3B。行驶指令信息至少包含行驶体3B的目的地。在此,行驶体3B的目的地设为充电开始侧起降场。
然后,飞行体2通过基于飞行指令信息的自主飞行控制部17的自主控制而自主飞行至充电开始侧起降场(S200)。此外,行驶体3B通过基于行驶指令信息的自主行驶控制部19的自主控制而自主行驶至充电开始侧起降场(S210)。
然后,当飞行体2到达充电开始侧起降场时,飞行体2通过如图2所示地与已经在充电开始侧起降场待机的行驶体3B连结而着陆(S220)。由此,飞行体2和行驶体3B再次构成下一代型出租车1。
接着,参照图6,到达管理部15向下一代型出租车1发送行驶指令信息(S300)。行驶指令信息至少包含飞行体2结束充电而要起飞的起降场。以下,也将飞行体2结束充电而要起飞的起降场称为充电完成侧起降场。充电完成侧起降场是比充电开始侧起降场靠近使用者的目的地的起降场。但是,充电完成侧起降场也可以设为与充电开始侧起降场相同的起降场。
接着,下一代型出租车1通过基于行驶指令信息的由自主行驶控制部19进行的自主控制,一边使用行驶体3B的电池20来进行飞行体2的电池18的充电(S310)一边自主行驶至充电完成侧起降场(S320)。
在下一代型出租车1到达充电完成侧起降场后,飞行体2通过由自主飞行控制部17进行的自主控制而保持着载有使用者的状态从行驶体3B分离并起飞(S330)。
从飞行体2分离的行驶体3B向最近的充电站自主行驶(S340),执行电池20的充电(S350)。
另一方面,飞行管理部14基于车辆调度请求信息来生成飞行指令信息,并向飞行体2发送飞行指令信息(S360)。飞行指令信息至少包含目的地侧起降场。
此外,飞行管理部14向行驶体3C发送行驶指令信息(S370)。具体而言,飞行管理部14向在目的地侧起降场的附近待机的多个行驶体3中的任一个发送行驶指令信息。飞行管理部14可以将在目的地侧起降场的附近待机的多个行驶体3中的到目的地侧起降场的所需时间最短的行驶体3设为行驶体3C,也可以将电池20的放电容量最大的行驶体3设为行驶体3C。行驶指令信息至少包含行驶体3C的目的地。在此,行驶体3C的目的地设为目的地侧起降场。
然后,飞行体2通过基于飞行指令信息的自主飞行控制部17的自主控制而自主飞行至目的地侧起降场(S380)。此外,行驶体3C通过基于行驶指令信息的自主行驶控制部19的自主控制而自主行驶至目的地侧起降场(S390)。优选的是,行驶体3C以在飞行体2到达目的地侧起降场之前到达目的地侧起降场的方式朝向目的地侧起降场自主行驶。
然后,当飞行体2到达目的地侧起降场时,飞行体2通过如图2所示地与已经在目的地侧起降场待机的行驶体3C连结而着陆(S400)。由此,飞行体2和行驶体3C再次构成下一代型出租车1。
接着,到达管理部15向下一代型出租车1发送行驶指令信息(S410)。行驶指令信息至少包含使用者的目的地。行驶指令信息可以包含行驶体3C的行驶路线。自主行驶控制部19可以基于行驶指令信息来生成行驶体3C的最佳行驶路线。
然后,下一代型出租车1通过基于行驶指令信息的由自主行驶控制部19进行的自主控制而自主行驶至使用者的目的地(S420)。在下一代型出租车1到达使用者的目的地后,使用者从下一代型出租车1下车(S430)。之后,行驶体3C对连结于行驶体3C的飞行体2的电池18进行充电(S440),并且待机直至重新出现使用者(S450)。
以上,对第二实施方式进行了说明,上述实施方式具有以下的特点。
飞行体2被配置为由能充电的电池18驱动。行驶体3被配置为能在与飞行体2连结的状态下对飞行体2的电池18进行充电。飞行指令信息(飞行信息)包含飞行体2要临时着陆来对飞行体2的电池18进行充电的临时目的地侧起降场(临时着陆预定地)。临时目的地侧起降场是使用者的出发地与目的地侧起降场之间的地点。飞行管理部14(临时着陆预定地车辆调度部)还向临时目的地侧起降场调度未连结有飞行体2的行驶体3。根据以上的构成,能实质上延长飞行体2的续航距离。
此外,行驶体3一边对飞行体2的电池18进行充电一边从临时着陆预定地车辆调度部朝向使用者的目的地行驶。根据以上的构成,能利用充电时间使行驶体3朝向使用者的目的地靠近,因此能缩短使用者的移动时间。
需要说明的是,在上述各实施方式中,飞行体2可以由自然人或法人单独拥有,或者由自然人或法人与其他自然人或法人共同拥有。优选设为多个行驶体3由服务提供运营商持有,并根据需要而出租给自然人或法人这样的形态为好。不过,也可以由自然人或法人单独拥有多个行驶体3,或者由自然人或法人与其他自然人或法人共同拥有多个行驶体3。
在上述的例子中,程序能使用各种类型的非暂时性计算机可读介质(non-transitory computer readable medium)进行储存并供给至计算机。非暂时性计算机可读介质包括各种类型的有形记录介质(tangible storage medium)。非暂时性计算机可读介质的例子包括:磁记录介质(例如软盘、磁带、硬盘驱动器)、光磁记录介质(例如磁光盘)。非暂时性计算机可读介质的例子还包括:CD-ROM(Read Only Memory)、CD-R(Compact Disk-Recordable:可刻录光盘)、CD-R/W(Compact Disc-ReWritable:可重写光盘)、半导体存储器(例如,掩模ROM、PROM(Programmable ROM:可编程ROM)、EPROM(Erasable PROM:可擦除PROM)、闪存ROM、RAM(random access memory))。此外,程序也可以通过各种类型的暂时性计算机可读介质(transitory computer readable medium)供给至计算机。暂时性计算机可读介质的例子包括:电信号、光信号以及电磁波。暂时性计算机可读介质能通过电线和光纤等有线通信线路或无线通信线路将程序供给至计算机。
根据以上说明的本公开,显而易见的是,本公开的实施方式可以以多种方式变化。这样的变化不应被视为脱离本公开的构思和范围,并且对于本领域技术人员而言显而易见的是,所有这些修改都包括在权利要求书的范围内。
- 运送系统以及运送管理服务器、飞行体、行驶体
- 运送管理系统、运送管理方法及计算机可读取的存储介质