成型平台的分离式调平与锁紧装置及3D打印设备
文献发布时间:2023-06-19 11:54:11
技术领域
本申请涉及3D打印技术领域,具体涉及一种成型平台的分离式调平与锁紧装置及具有该成型平台的分离式调平与锁紧装置的3D打印设备。
背景技术
3D打印技术可通过例如光机来逐层固化光敏树脂,从而创建出3D打印对象。例如,3D打印设备可包括一个可以容纳例如液态树脂的料槽,用于盛放可被特定波长的紫外光照射后固化的树脂。成型平台与料槽离型膜形成3维成型空间。液态聚合物放置料槽中,光机对料槽底部进行辐射,通过能量及图形控制,每次可固化一定厚度及形状的薄层树脂。升降装置驱动成型平台上升,每次截面曝光完成后向上提拉一定高度(该高度与薄层厚度一致),使打印件逐层固化成型。打印件成型完成后,成型平台需从升降装置上取下并进行后处理。
在成型过程中,要求成型平台与光机、固化面保持平行。因此,需要设计开发成型平台的调平定位和锁紧装置。
需要说明的是,在上述背景技术部分公开的信息仅用于加强对本申请的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
发明内容
本申请提供了一种成型平台的分离式调平与锁紧装置及具有该成型平台的分离式调平与锁紧装置的3D打印设备,能够改善锁紧功能。
本申请的其他特性和优点将通过下面的详细描述变得显然,或部分地通过本申请的实践而习得。
根据本申请的一个方面,提供一种成型平台的分离式调平与锁紧装置,包括:电磁锁紧机构,具有定位面,用于通过电磁方式锁紧定位于所述定位面的所述成型平台;调平机构,与所述电磁锁紧机构连接,用于调平并锁定所述电磁锁紧机构的所述定位面。
根据一些实施例,所述电磁锁紧机构包括至少一个失电型电磁铁。
根据一些实施例,所述电磁锁紧机构包括:定位座,与所述调平机构连接;第一支承部,与所述定位座连接;第一失电型电磁铁,设置于所述第一支承部;第二支承部,与所述定位座连接;第二失电型电磁铁,设置于所述第二支承部;其中,所述第一支承部与所述第二支承部之间具有容置所述成型平台的通道。
根据一些实施例,所述定位面包括失电型电磁铁的上表面。
根据一些实施例,所述调平机构具有与所述通道相对的凹槽;所述分离式调平与锁紧装置还包括到位识别装置,所述到位识别装置设置于所述凹槽。
根据一些实施例,所述到位识别装置包括微动开关、非接触式电磁传感器、或非接触式光电传感器。
根据一些实施例,所述分离式调平与锁紧装置还包括操作感应识别装置,所述操作感应识别装置设置于所述第一支承部或所述第二支承部且位于与所述定位座相背的部分。
根据一些实施例,操作感应识别装置包括光感漫反射传感器、红外接近传感器、或微动开关。
根据一些实施例,分离式调平与锁紧装置还包括:装置罩,遮蔽或部分遮蔽所述电磁锁紧机构和所述调平机构,所述装置罩具有用于通过所述成型平台的彼此连通的第一开口和第二开口。
根据本申请的第二方面,提供一种3D打印设备,包括:升降装置;以及前述任一分离式调平与锁紧装置,设置于所述升降装置。
根据本申请的一些实施例,提供一种成型平台的分离式调平与锁紧装置,调平与锁紧操作相互独立,不会相互影响。采用具有定位面的电磁锁紧机构,通过电磁方式锁紧定位于所述定位面的所述成型平台,结构简单,易于操作。
附图说明
在以下参照附图对本申请的非限制性实施例所作的详细描述中,本申请的其它特征、目的和优点将会变得更明显。其中:
图1示出根据本申请示例实施例的用于成型平台的分离式调平与锁紧装置的结构示意图。
图2A和图2B示出根据本申请示例实施例的分离式调平与锁紧装置锁紧成型平台后的示意图。
图3示出成型平台的一种示例性结构。
图4示出根据本申请示例实施例的3D打印设备的部分视图。
图5示出根据本申请实施例的用于控制调平与锁紧装置的控制系统的框图。
图6示出根据示例实施例的失电型电磁铁的驱动电路。
图7示出根据示例实施例的用于操作感应识别传感器或到位识别传感器的驱动电路。
图8示出根据示例实施例的控制系统对放置成型平台的过程进行控制的流程图。
图9示出根据示例实施例的控制系统对移除成型平台的过程进行控制的流程图。
具体实施方式
现在将参考附图更全面地描述示例实施例。然而,示例实施例能够以多种形式实施,且不应被理解为限于在此阐述的实施例;相反,提供这些实施例使得本公开将全面和完整,并将示例实施例的构思全面地传达给本领域的技术人员。在图中相同或相似的附图标记表示相同或类似的部分,因而有时可省略对它们的重复描述。附图仅为本公开的示意性图解,并非一定是按比例绘制。
所描述的特征、结构或特性可以以任何合适的方式结合在一个或更多实施例中。在下面的描述中,提供许多具体细节从而给出对本公开的实施例的充分理解。然而,本领域技术人员将意识到,可以实践本公开的技术方案而没有这些特定细节中的一个或更多,或者可以采用其它的方式、组元、材料、装置或步骤等。在这些情况下,将不详细示出或描述公知结构、方法、装置、实现、材料或者操作。
附图中所示的方框图不一定必须与物理上独立的实体相对应。可以采用软件、或在一个或多个硬件模块和/或可编程模块中实现这些功能实体或功能实体的一部分,或在不同网络和/或处理器装置和/或微控制装置中实现这些功能实体。
在现有3D打印设备中,成型平台的调平定位和锁紧方式多使用一体式调平和定位方式(调平的同时进行定位),使用机械方式对成型平台进行锁紧。这样,锁紧操作对调平操作会造成影响。此外,机械锁紧方式取放操作复杂,稳定性差。而且,手动操作也会由于人员操作力度差异而导致重复定位精度低。
为此,本申请提出一种用于成型平台的分离式调平与锁紧装置,包括分离的电磁锁紧机构和调平机构。电磁锁紧机构具有定位面,通过电磁方式锁紧定位于定位面的成型平台。调平机构与电磁锁紧机构连接,调平并锁定电磁锁紧机构的定位面。
这样,根据本申请的实施方式,调平与锁紧操作相互独立,不会相互影响。同时,采样具有定位面的电磁锁紧机构,通过电磁方式锁紧定位于定位面的成型平台,结构简单,易于操作,重复定位精度和可靠性得到提高。解决了取放成型平台操作复杂的问题,可做到操作时不需要过多辅助动作,做到随取随放。
在下文中,将参照附图详细描述根据本申请技术构思的实施例。易于理解,这里给出的实施例仅是示例性的,而不是限定本申请的范围。
图1示出根据本申请示例实施例的用于成型平台的分离式调平与锁紧装置的结构示意图。
如图1所示,根据本申请示例实施例的用于成型平台的分离式调平与锁紧装置10可包括电磁锁紧机构100和调平机构200。
电磁锁紧机构100可具有定位面,用于通过电磁方式锁紧定位于定位面的成型平台20(参见图2A-2B及图3)。定位面可以是例如电磁锁紧机构100包括的电磁铁的上表面,如后面所详细描述的,但本申请不限于此。
调平机构200与电磁锁紧机构100连接,可调平并锁定电磁锁紧机构100的定位面。如后面所描述的,调平机构可通过调平顶丝203进行调平,但本申请不限于此。本领域技术人员基于本申请的教导,可采用任何其他已知或新研发的调平方式。易于理解,本申请通过采用功能上分离的调平与锁紧装置,实现调平与锁紧的去耦,本申请对调平方式没有限制。
根据一些实施例,电磁锁紧机构可包括电磁铁,例如上电型电磁铁或失电型电磁铁,从而通过电磁力锁紧成型平台。
根据示例实施例,在电磁锁紧机构中可采用至少一个失电型电磁铁。失电型电磁铁,也称为失电保护型电磁铁或永久吸持电磁铁(Permanent holding magnets),是与普通的通电有磁、断电无磁的上电型电磁铁相反的一类电磁铁,即通电表现为无磁(或弱磁)、断电有磁。例如,失电型电磁铁在电磁铁线圈内部设置有永磁体。在线圈没有通电时,永磁体可吸引铁或其他铁磁性材料。当线圈通电时,线圈产生的磁场与永磁体的磁场作用在铁或其他铁磁性材料上的力可彼此抵消,对外呈现出没有磁力(或微弱磁力)。
通过采用失电型电磁铁,可在不通电时长时间对成型平台进行锁紧,能够解决电磁铁长时间通电时的发热和电耗损问题,并可提高电磁铁寿命。
根据示例实施例,参见图1,电磁锁紧机构100可包括定位座101、第一支承部103A、第一失电型电磁铁105A、第二支承部103B、以及第二失电型电磁铁105B。
如图1所示,定位座101可与调平机构200连接。第一支承部103A与定位座101连接,第一失电型电磁铁105A设置于第一支承部103A。第二支承部103B可与定位座101连接,第二失电型电磁铁105B可设置于第二支承部103B。
参见图1,第一支承部103A与第二支承部103B之间可具有容置成型平台的通道107。成型平台可通过通道107定位于电磁锁紧机构100并被锁定。
根据一些实施例,定位座101与第一支承部103A和第二支承部103B可为一体成型结构。
参见图1,根据一些实施例,定位面可包括第一和第二失电型电磁铁105A和105B的上表面1052。成型平台在插入通道107后,可通过第一和第二失电型电磁铁105A和105B的磁力锁紧于定位面,例如上表面1052。易于理解,本申请的技术方案不限于此。例如,根据实际情况,定位面也可以设定为第一和第二失电型电磁铁105A和105B的侧面或部分底表面等。
根据示例实施例,参见图1,调平机构200可包括调平座201、调平顶丝203、以及紧固件205。调平座201可设置在3D打印设备的升降装置上,通过带动电磁锁紧机构100上升,从而驱动成型平台上升。
根据示例实施例,通过调平机构200首先将定位面调平。然后,将定位座101和调平座201用紧固件205通过定位座101上的孔固定,从而锁死定位面。例如,调平座201通过螺丝固定在升降机构上。调平座201上有三个螺纹通孔,三个调平顶丝203可在螺纹孔里转动。调平时,调平座201不动,分别转动三个调平顶丝203,顶着定位座101进行运动,三点确认一个平面。当调到需要的平面时,锁紧紧固件205即可。
根据一些实施例,定位面采取面定位,使用时不会严重磨损、松动、变形,从而定位面在一次精准调平后不会出现定位面变化问题。
参见图1,根据示例实施例,调平机构200具有与通道107相对的凹槽207。分离式调平与锁紧装置还包括到位识别装置300,到位识别装置300可设置于凹槽207中。易于理解,本申请对到位识别装置300的设置方式没有限制。例如,调平机构200也可不设置凹槽207来容置到位识别装置300,到位识别装置300可直接设置在调平机构200的前表面。根据一些实施例,到位识别装置300也可设置在其他合适的位置。
根据一些实施例,到位识别装置300可包括微动开关、非接触式电磁传感器、或非接触式光电传感器等,本申请对此没有特别限制。
参见图1,根据示例实施例,分离式调平与锁紧装置还可包括操作感应识别装置400。操作感应识别装置400可设置于第一支承部103A或第二支承部103B且位于与定位座101相背的部分。这样,当需放置或取走成型平台时,操作感应识别装置400可被触发从而输出开始操作的触发信号。易于理解,也可以采用其他方式对操作进行触发,例如手动开关、自动开关或其他系统联动模块等,本申请对此没有特别限制。
根据一些实施例,操作感应识别装置400可包括光感漫反射传感器、红外接近传感器、或微动开关等。根据一些实施例,操作感应识别装置400可具有10-60mm的感应距离。根据另一些实施例,操作感应识别装置400可具有10-30mm的感应距离。此距离可与成型平台的尺寸相关。
参见图1,根据示例实施例,根据本申请的分离式调平与锁紧装置还可包括装置罩500。装置罩500可遮蔽或部分遮蔽电磁锁紧机构和调平机构,如图2A和2B所示。装置罩500具有用于通过成型平台的彼此连通的第一开口501和第二开口503。如图1所示,装置罩500还可具有通孔505,以露出操作感应识别装置400,例如透出光电传感器的光源。
图3示出成型平台的一种示例性结构。图3所示的成型平台可利用根据本申请实施例的分离式调平与锁紧装置来布置到3D打印设备以完成3D打印。
参见图3,成型平台可包括平台31和手柄32。手柄32设置在平台31上。平台31在3D打印时起到承载打印件的作用,使打印件逐层成型。手柄32便于操作人员(或机械手)握持及移动平台,并可通过根据本申请的分离式调平与锁紧装置固定到打印设备的升降装置,如图4所示。
平台31可包括成型部311和支撑部312。成型部311和支撑部312可一体成型,即成型部311和支撑部312可为一个整体的部件,有利于减少因组装导致的累积误差。
根据一些实施例,成型部311上沿竖直方向设有多个排气孔3110,从而在成型部311下降进入液态聚合物时,可通过排气孔3110快速排气或排压,提高成型平台的稳定性,保证成型部311的底面与3D打印设备的料槽离型膜之间的间隙快速达到预设值,满足打印需求。
手柄32可包括卡接部321和手持部322。卡接部321设置在支撑部312的顶面上。卡接部321的宽度大于支撑部312的宽度。卡接部321可用于成型平台设置并锁紧到根据本申请的分离式调平与锁紧装置,从而使成型平台固定到打印设备的升降装置。
卡接部321可包括磁性材料,如45钢或其它抗氧化铁磁合金材料,从而分离式调平与锁紧装置的电磁铁可吸附卡接部321。铁磁材料的厚度可根据电磁铁吸附力、空间和材料而定。
根据示例实施例,图3所示的成型平台可通过图1所示装置罩500的第一开口501和第二开口503插入通道107并通过磁力锁紧于定位面,从而得到如图2A和2B所示的布置结构。
图4示出根据本申请示例实施例的3D打印设备的部分视图。
如图4所示,3D打印设备可包括根据本申请实施例的分离式调平与锁紧装置10及升降装置30。
分离式调平与锁紧装置10可通过调平机构200设置于升降装置30。例如,可通过将调平座201固定于升降装置30而将分离式调平与锁紧装置10设置于升降装置30。
在使用中,成型平台20可锁紧于分离式调平与锁紧装置10。
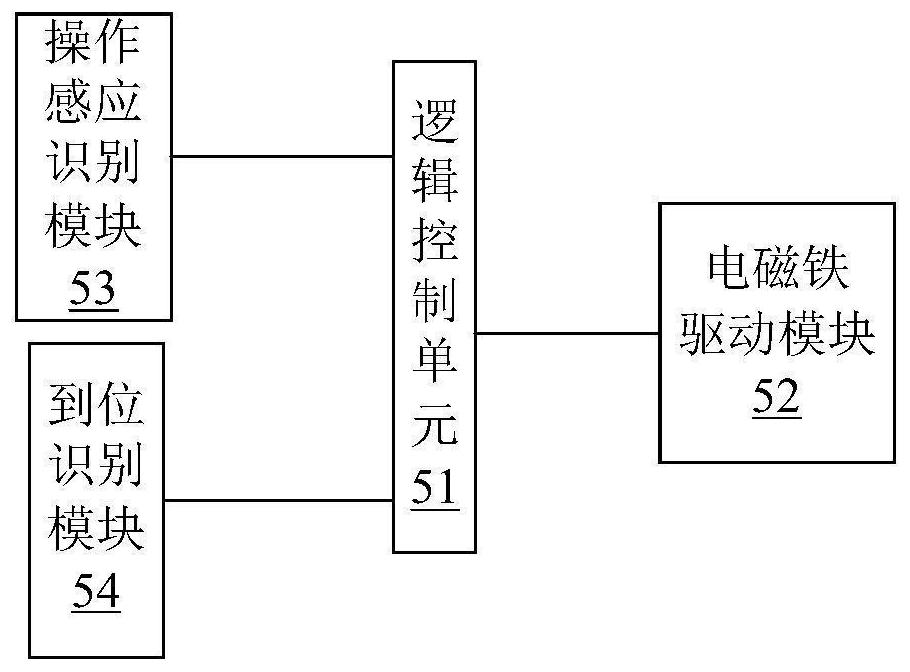
图5示出根据本申请实施例的控制系统的框图,可用于控制调平与锁紧装置的操作。
下面以具有失电型电磁铁的调平与锁紧装置为例对该实施例的控制系统进行描述。易于理解,根据该实施例的控制系统通过适应性改变也可用于具有其他类型电磁铁的调平与锁紧装置。
参见图5,根据示例实施例的控制系统可包括逻辑控制单元51、电磁铁驱动模块52、操作感应识别模块53、到位识别模块54。
逻辑控制单元51与所述电磁铁驱动模块52、所述操作感应识别模块53、所述到位识别模块54信号连接,接收来自所述操作感应识别模块53、所述到位识别模块54的触发信号,并对电磁铁驱动模块52提供控制信号。
根据一些实施例,逻辑控制单元51可包括单片机或FPGA、PLC、DSP等。
电磁铁驱动模块52在逻辑控制单元51的控制下,向所述电磁铁提供驱动电流或断开驱动电流,从而实现成型平台的取放。
操作感应识别模块53可包括操作感应识别传感器400。在所述操作感应识别传感器被触发后,所述操作感应识别模块53可输出第一触发信号。
到位识别模块54可包括到位识别传感器300。在所述到位识别传感器被触发后,所述到位识别模块可输出第二触发信号。
根据示例实施例,逻辑控制单元51配置为根据所述第一触发信号向所述电磁铁驱动模块52输出控制信号以使所述电磁铁上电以解除对所述成型平台的锁紧作用;同时,逻辑控制单元51还配置为根据所述第二触发信号向所述电磁铁驱动模块52输出控制信号以使所述电磁铁断电以实施对所述成型平台的锁紧作用。
根据一些实施例,所述逻辑控制单元51还配置为在所述操作感应识别传感器400被触发时,所述逻辑控制单元51设置一延迟时间。如果所述到位识别传感器300在所述延迟时间内未被触发,则所述逻辑控制单元51向所述电磁铁驱动模块52输出控制信号以使所述电磁铁断电,从而可以避免由于未放置到位等原因导致电磁铁的长时间上电而无法锁紧成型平台,引起操作意外。
根据本申请实施例的控制系统能够基于操作感应识别传感器400、到位识别传感器300触发的信号对电磁铁进行通电、断电控制,可以进行成型平台的松开、锁紧操作,从而可以锁紧或移除成型平台。
根据该实施例,利用传感器对操作进行自动识别,相应驱动电磁铁上电/断电,在解决操作识别准确性的同时,满足自动化/半自动化生产需求。
易于理解,图5所示的控制系统仅是一种示例,本领域技术人员基于本申请的教导,可以采用其他任何合适的系统对本申请的调平与锁紧装置进行控制。同样,图5所示的控制系统不仅可用于根据本申请示例实施例的调平与锁紧装置,也可以应用于其他利用电磁铁进行锁紧操作的调平与锁紧装置。
图6示出根据示例实施例的电磁铁的驱动电路。
如图6所示,根据示例实施例的电磁铁驱动电路包括输入端子IN、第一和第二输出端子OUT1和OUT2、光耦U40以及继电器K5等。
光耦U40连接输入端子IN和3.3V电源,通过输入端子接收来自逻辑控制单元51的控制信号,从而逻辑控制单元51通过光耦U40实现对继电器K5的通断控制,进而控制第一和第二输出端子OUT1和OUT2输出或断开提供给继电器的电流,实现松开或锁紧成型平台的目的。
本领域技术人员易于理解图6所示电路的工作原理,故其具体工作过程不再赘述。
图7示出根据示例实施例的用于操作感应识别传感器或到位识别传感器的驱动电路。
参见图7,根据示例实施例的驱动电路包括连接到操作感应识别传感器或到位识别传感器的输入端子IN1、光耦U26、连接在光耦U26输入端和输入端子IN1之间的电阻R45、连接到光耦U26的输出端的输出端子OUT、连接在输出端子与电源之间的电阻R46以及连接在输出端子OUT与地之间的电容C89。输出端子OUT可连接到逻辑控制单元51以提供触发信号。
如图7所示,操作感应识别传感器或到位识别传感器的输出为24V电平信号,故利用光耦U26将其转换为3.3V的电平信号,使其满足单片机等逻辑控制单元51对电平信号的采样要求。
本领域技术人员易于理解图7所示电路的工作原理,故其具体工作过程不再赘述。
图8示出根据示例实施例的控制系统对放置成型平台的过程进行控制的流程图。图8所示的控制流程图可用于逻辑控制单元51的控制过程。
下面以对具有失电型电磁铁的调平与锁紧装置的操作控制为例对控制过程进行说明。易于理解,根据该实施例的控制过程通过适应性改变也可用于具有其他类型电磁铁的调平与锁紧装置的控制。
如图8所示,在S801,逻辑控制单元开始工作。
根据一些实施例,逻辑控制单元开始工作后,可首先判定调平与锁紧装置上是否存在成型平台,并可设置状态信息。例如,逻辑控制单元可根据来自到位识别传感器的信号判定是否已经存在成型平台,并可存储相应状态信息。如果已经存在成型平台,则后续操作可确定为移除操作;反之,可确定后续操作为放置操作。根据一些实施例,控制系统可包括用于检测成型平台的检测传感器,逻辑控制单元可根据来自检测传感器的信号判定是否已经存在成型平台,并可存储相应状态信息。
在S803,逻辑控制单元读取来自操作感应识别传感器的第一电平信号。
在S805,根据第一电平信号的高低,逻辑控制单元判断是否存在成型平台的放置操作。例如,当存在成型平台的放置操作时,操作感应识别传感器被触发,逻辑控制单元将读取到低电平。如果存在放置操作,则转到S807;否则回到S803。
在S807,对电磁铁上电解锁,使之基本不产生磁力。根据一些实施例,所述逻辑控制单元51可同时设置一延迟时间。根据一些实施例,延迟时间可设置为1-2分钟。
在S809,逻辑控制单元读取来自到位识别传感器的第二电平信号。
在S811,根据第二电平信号的高低,逻辑控制单元判断成型平台是否到位。例如,当成型平台放置到位时,到位识别传感器被触发,逻辑控制单元将读取到低电平。如果放置到位,则转到S815;否则转到S813。
在S813,判断设置的延迟时间是否超时。如果超时,则转到S815;否则回到S809。
在S815,无论成型平台放置到位或者超时,对电磁铁断电,使之产生磁力,锁紧成型平台。例如,如果所述到位识别传感器在所述延迟时间内被触发、或者超出延迟时间未被触发(超时),则所述逻辑控制单元向所述电磁铁驱动模块输出控制信号以使所述电磁铁断电,从而可以避免由于未放置到位等原因导致电磁铁的长时间上电而无法锁紧成型平台,引起操作意外。根据一些实施例,对于超时的情况,逻辑控制单元可控制发出报警或提醒信号,可提示用户重新进行放置操作。
图9示出根据示例实施例的控制系统对移除成型平台的过程进行控制的流程图。图9所示的控制流程图可用于逻辑控制单元51的控制过程。
如图9所示,在S901,逻辑控制单元开始工作。
在S903,逻辑控制单元读取来自操作感应识别传感器的电平信号。
在S905,根据电平信号的高低,逻辑控制单元判断是否存在成型平台的移除操作。例如,当存在成型平台的移除操作时,操作感应识别传感器被触发,逻辑控制单元将读取到低电平。如果存在移除操作,则转到S907;否则回到S903。
在S907,对电磁铁上电解锁,使之基本不产生磁力。根据一些实施例,所述逻辑控制单元51可同时设置一延迟时间。根据一些实施例,延迟时间可设置为1-2分钟。
在S909,逻辑控制单元再读取来自操作感应识别传感器的电平信号。
在S911,根据电平信号的高低,逻辑控制单元判断是否完成成型平台的移除操作。例如,当移除操作完成时,操作感应识别传感器的触发状态消除,逻辑控制单元将读取到高电平。如果完成移除操作,则转到S915;否则转到S913。
在S913,判断设置的延迟时间是否超时。如果超时,则转到S917;否则回到S909。
在S915,如果成型平台的移除操作完成,对电磁铁断电,移除操作结束。根据一些实施例,可延迟5-15秒后对电磁铁断电,提高操作友好性。
在S917,如果超过延迟时间,对电磁铁断电。此外,逻辑控制单元可控制发出报警或提醒信号,可提示用户重新进行移除操作。
以上描述了根据本申请实施例的系统。通过以上的详细描述,本领域的技术人员易于理解,根据本申请实施例的技术方案具有以下优点中的一个或多个。
根据本申请的实施例,在调平定位上采取调平和定位分离开来的方式。由于调平和定位功能单一、不相互影响,调平和定位装置在稳定性上远远优于一体式。另外,该方案具有结构简单、成本低、经济性好等优点。
根据一些实施例,调平机构首先将定位面调平,然后将定位面用紧固件锁死固定。定位面可采取面定位,使用时不会严重磨损、松动、变形,在一次精准调平后不会出现定位面变化问题。
根据本申请的实施例,针对机械锁紧方案操作复杂、重复操作定位精度低的问题,采用了失电型电磁铁锁紧方案。通过控制失电型电磁铁磁力,达到吸附和放松的作用。
根据本申请实施例,通过操作感应识别装置识别取放操作动作。当操作感应识别装置识别到操作时,失电型电磁铁上电消磁,从而不对成型平台施加作用力,人员或机械手可放置或移除成型平台。根据本申请实施例的方案可适用于机械手操作,满足自动化/半自动化生产需求,方便工厂批量化生产时机械手对成型平台的取放操作。
根据本申请实施例,对于人员识别放置到位可靠性低的问题,通过到位识别装置识别成型平台放置是否到位,满足自动化/半自动化生产需求。
根据本申请实施例,失电型电磁铁在通电时不表现出磁力,可在不通电时长时间对成型平台进行锁紧。
根据实施例,定位座用于成型平台安装和定位,同时对失电型电磁铁、到位识别装置、操作感应识别装置等进行固定。
根据一些实施例,在所述操作感应识别传感器被触发时,逻辑控制单元可设置一延迟时间。如果所述到位识别传感器在所述延迟时间内未被触发,则所述逻辑控制单元向所述失电型电磁铁驱动模块输出控制信号以使所述失电型电磁铁断电,从而可以避免由于未放置到位等原因导致失电型电磁铁的长时间上电而无法锁紧成型平台,引起操作意外。
根据实施例,到位识别装置可由接近开关、固定座等构成。在成型平台放置到位后,接近开关闭合,并将闭合信号输送到控制系统,从而识别成型平台是否放置到位。
根据实施例,操作感应识别装置可包括光电传感器。当需放置或移除成型平台时,光电传感器光源被遮挡,光电传感器输出识别信号给控制系统。控制系统控制失电型电磁铁上电,失电型电磁铁松开成型平台。光电传感器可设置于取放操作时可以将传感器遮挡的位置。
以上,仅是本申请的一些实施例,并非对本申请做任何形式上的限制。这些示例性实施例并不意图是穷举性的或者将本申请局限于所公开的精确形式,并且明显的是,在以上教导的启示下,本领域普通技术人员能够做出许多修改和变化。因此,本申请的范围并不意图局限于前述的实施例,而是意图由权利要求和它们的等同物所限定。
本申请在这方面不限于任何特定的构造。以上描述仅为本申请的较佳实施例以及对所运用技术原理的说明。本领域技术人员应当理解,本申请中所涉及的发明范围,并不限于上述技术特征的特定组合而成的技术方案,同时也应涵盖在不脱离发明构思的情况下,由上述技术特征或其等同特征进行任意组合而形成的其它技术方案。例如上述特征与本申请中公开的(但不限于)具有类似功能的技术特征进行互相替换而形成的技术方案。
- 成型平台的分离式调平与锁紧装置及3D打印设备
- 成型平台的分离式调平与锁紧装置及3D打印设备