具有解耦的多绕组的智能电动马达
文献发布时间:2023-06-19 11:55:48
技术领域
本发明涉及一种智能电动马达,特别是用于飞行器的智能电动马达,并且尤其涉及一种具有高机械集成度的多个解耦绕组的电动马达的电气架构。
背景技术
垂直起降的飞行器越来越多地应用,并且尤其用于城市内和城市间的货物或人员运输。
航空运输的革命导致对新型飞行器的推进需求的增长,例如,VTOL(“垂直起降”)。电能是这场革命的主要载体,因为与传统的推进系统(带有液压或气动能量分配的热力)相比,它的实施的灵活性、它的效率(仅产生必要的能量)、它的可靠性(有限的维护),并且主要是由于质量和体积的潜在减少。另一方面,机载电动马达的当前功率不允许与单台热机产生的功率竞争;因此需要成倍增加电动马达的数量。
因此,容易理解,电动马达、控制器(电力电子和控制电子)、过滤和冷却系统组件的机电一体化(质量和体积)的限制是该变化的关键问题,尤其是保持推进力组件,其质量和体积保持较低。
已知具有齿轮箱和多个独立绕组的智能马达的架构,其中每个绕组由H桥转换器供电,但未集成输入滤波。智能马达中齿轮箱的存在会降低马达的可靠性并增加维护操作。
还已知一种具有机电转换器拓扑结构的多定子绕组的马达,其包括在轴向方向上面向一个或两个环形转子的环形定子,该定子包括多个绕组和永磁体转子。马达具有的电气架构包括两组,每组三个以星形电联接的绕组,但其中的中间导体对两组共用。
还已知一种智能马达,包括两组三个以星形电联接的绕组,但其中两个星形联接的组在每种情况下同时缠绕在单个齿上,该齿至少磁性地联接它们。在这种构造中,两组的中间导体电连接以具有电气上的共用点并平衡电流。这种构造在生产方面成本相对较低。
然而,这种构造无法在两个星形连接的组之间实现电磁隔离。
发明内容
本发明旨在提供一种没有齿轮箱的智能马达架构的解决方案,其允许提高马达的每单位质量的功率,以用于需要轻型、强大的并且包括它自己的电力和控制电子马达的应用,并保证在定子的一个星形电压逆变器臂发生故障和定子之一发生故障的情况下提供机械扭矩。
在本发明的第一个目的中,提出了一种智能马达,包括永磁同步电机和电子控制单元,该同步电机包括一个或两个具有永磁体的转子和至少一个六相定子,每个转子设有至少两个三相组件,每个组件由星形电联接的三个绕组形成,并且较佳地具有由星形电联接的三个第一绕组形成的第一三相组件和由星形电联接的三个第二绕组形成的第二三相组件形成。同步电机的所述电子控制单元包括每个定子一个控制逆变器,该控制逆变器装备六个独立的臂,每个臂构造成控制六相定子的一相。
根据本发明的第一目的的一般特征,绕组的两个星形连接的组件彼此磁性和电气地解耦。
两个三相绕组组件相对于彼此的电气和磁性隔离允许消除相间电感。
对于给定的六相定子,两个星形连接的绕组组件的磁性和电气解耦允许使第一组绕组独立于第二组绕组。两组绕组之间的这种独立性为智能马达提供了特别在降级模式下操作的可能性,在降级模式中,在例如另一组绕组的至少一个逆变器臂出现故障后,只有一组绕组与相关的逆变器臂一起操作。
在设有两个六相定子和转子的智能马达的另一个示例中,六相定子的磁性和电气解耦也允许第一定子独立于第二定子。这种两个定子之间的独立性为智能马达提供了尤其在降级模式下操作的可能性,在降级模式中,仅单个定子在例如另一个定子出现故障后操作。
上面参考现有技术提到的并且包括星形电联接的两组三个绕组的智能马达特别地具有为两组绕组共用的中间导体。这种构造不允许两个星形连接的组件之间的电气和磁性隔离。
在根据本发明的智能马达中,两个星形连接的组件连续缠绕而不是同时缠绕,这比同时缠绕花费更多的时间,但是允许磁性和电气解耦。电流平衡是借助只卷绕每组绕组来实现的。因此,卷绕必须比在两组绕组同时缠绕的构造中更佳精确,绕组的控制也必须更加精确。
不连接中间导体允许更多的控制自由,因此允许降级模式。
较佳地,智能马达在其壳体内部没有齿轮箱,壳体或外壳容纳同步电机和控制单元。这允许实现体积和重量的收益以及可靠性和维护的收益。
有利地,电动机的所述至少一个定子可以包括齿圈,三相组件的每个绕组围绕齿圈的单个齿缠绕。
定子或每个定子因此可以包括齿圈,第一绕组和第二绕组中的每一个都围绕齿圈的单个齿缠绕,这允许最小化定子的尺寸、特别是绕组头的尺寸。
转子或两个转子中的每一个可以有利地包括以哈尔巴赫(Halbach)阵列定位的磁体,这使得增加智能马达的每单位质量的扭矩。
较佳地,所述电动机的定子或每个定子可分为不同的角度范围,定子的角度范围的数量对应定子的三相组件的数量,角度范围延伸的角度对应于360°除以定子的三相组件的数量的结果。
第一组件的第一绕组因此定位在延伸超过180°机械的定子的第一角度范围中,而第二组件的第二绕组可以定位在延伸超过180°机械的定子的第二角度范围上,第一角度范围不同于第二范围。
第一组绕组和第二组绕组因此定位圆周长的两个不同部分上。这允许最大化磁性解耦并促进了两组绕组之间的电气隔离。
有利地,控制单元还可包括独立于另一组绕组的每组绕组中的电流调节模块,以及转子速度调节模块。
控制单元构造成在具有或没有机械位置传感器的情况下操作。机械位置传感器给出其上安装传感器的转子的机械角度位置。这允许控制单元具有该位置信息,以便能够调节六相定子的两组绕组中的电流。
当未安装位置传感器或由传感器发出的位置信息丢失时,由控制单元的调节模块实现位置估计方法来提供六相定子的两个绕组中的电流的调节功能。
电子控制单元可以有利地还包括连接接口,该连接接口将直流高压电源总线连接到逆变器的六个臂中的每一个臂并且包括装备有差模电容器的电容解耦状态。
有利地,对于每个逆变器臂,智能马达还可以包括其上安装有所述电子控制单元的电力电子板、逆变器的电子保护元件、至少一个相电流检测装置、以及直流高压总线的电压测量装置。
这种分成多个电力电子板的构造允许优化电力电子板占用的体积,例如将它们围绕连接接口放置,这还允许使得它们更靠近冷却设备,并且当冷却设备安装在智能马达的周缘上时,最大限度地冷却电力板。
较佳地,智能马达还包括连接接口与电力电子板之间的柔性链接部。
有利地,同步电机可以包括多个定子和多个定子共用的转子,每个定子彼此磁性和电气地独立。
同步电机可有利地包括至少四个定子以及第一和第二转子,第一转子对第一组至少两个定子的定子共用,第二转子对第二组至少两个定子的定子共用,第一组的定子与第二组的定子不同,并且每个定子彼此磁性和电气地独立。
附图说明
在通过参考附图阅读作为说明而非限制的以下内容时,将更好地理解本发明,附图中:
[图1]图1示意性地示出了装备有根据本发明的一个实施例的推进系统的多转子飞行器。
[图2]图2示意性地示出了根据本发明的第一实施例的图1的推进系统的智能马达的剖视图。
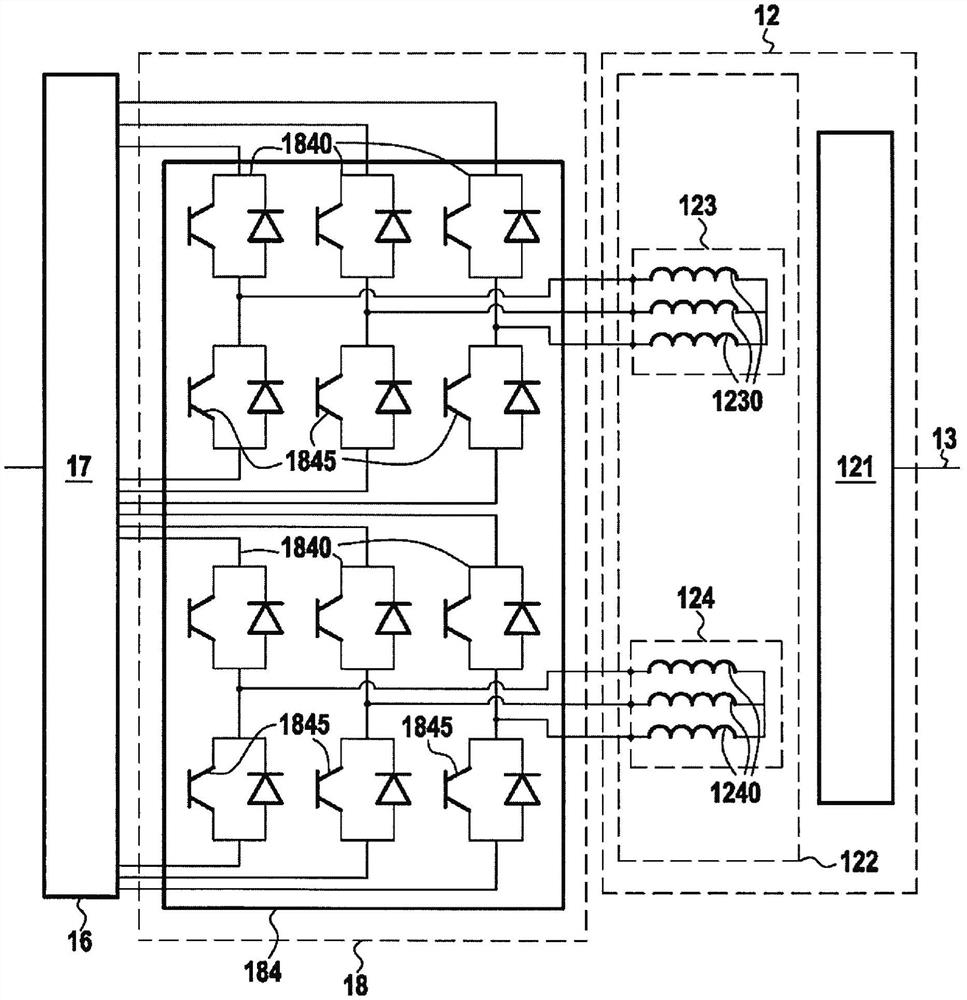
[图3]图3是根据图2的智能马达的电动机的第一实施例的电气架构的示意图。
[图4]图4示意性地示出了根据图2的智能马达的电动机的第二实施例的电气架构。
[图5]图5示意性地示出了根据图2的智能马达的电动机的第三实施例的电气架构。
具体实施方式
在图1中示意性地示出了多转子飞行器7,其装备有根据本发明的一个实施例的推进系统9。在图1所示的示例中,推进系统9包括分布在多转子虚线圆上的六个转子1至6。转子1至6形成三对转子,同一对转子关于对称中心8对称地相对。第一对转子包括转子1和6,第二对转子包括转子2和5,第三对转子包括转子3和4。此外,推进系统9包括用于每个转子1至6的智能马达10。
图2示意性地示出了根据本发明第一实施例的智能马达10的剖视图。
图2中所示的智能马达10包括电动机12,电动机12用作机电转换器并且设置有限定轴向方向D
智能马达10还包括叶轮14、电气过滤装置16、电子控制单元18和壳体20或外壳,在壳体20或外壳内部容纳电动机12、电子控制单元18和过滤装置16。
叶轮14通过传动轴13机械地联接到电动机12,传动轴13允许电动机驱动叶轮14。
在图2所示的实施例中,壳体20具有带圆形横截面的中空圆筒形状。壳体20的旋转轴线与电动机12的旋转轴线D
壳体20在轴向方向D
壳体20包括安装在壳体20的径向外表面203上的冷却设备24。术语“内”和“外”,以及“内部”和“外部”在本文中参考智能马达10中的径向方向D
冷却设备24包括从壳体20的径向外表面203径向向外延伸的成组翅片240,从而形成允许翅片240与横跨冷却设备24的翅片240的气流F之间的热交换的散热器。冷却空气流F由电动机12驱动的叶轮14的叶片140产生和馈送,并因此是自维持的。
在图2所示的实施例中,冷却设备24还包括围绕冷却翅片240定位的圆筒形冷却外壳245。冷却外壳245因此通过壳体20的径向外表面203限定其中冷却空气流F通过的冷却流248。
在一个变型中,智能马达可以不包括叶轮和冷却外壳,以减少智能马达的质量。然后智能马达将通过飞行器转子产生的气流冷却,转子通常由螺旋桨组成,螺旋桨直接机械连接到智能马达的机械旋转轴。
在示出根据本发明的智能马达10的所谓“轴向”构造的图2所示的实施例中,智能马达10包括:包括冷却设备的壳体20、包括电动机12的驱动部分、叶轮14和传动轴13,以及在轴向方向上与驱动部分分开的电子部分,该电子部分特别地包括电气过滤装置16和控制单元18。
为了将驱动部分与电子部分物理分开,智能马达10包括在径向平面中延伸的内壁15,该径向平面包括径向方向D
术语“上游”和“下游”在此处参考由图2中的箭头F示出的所递送的冷却空气流的流动方向使用。
电子控制单元18包括构造成给电动机12供电的静态电气转换器180。
电气转换器180直接放置在智能马达10的壳体20中的电动机12之后,这允许减少电气转换器180和电动机12之间穿过内壁15的电连接的长度,从而免除相间电感。
在图2所示的实施例中,电气转换器180包括六个电力电子板1800,它们布置在一起以形成具有与电动机12同轴的六边形基部的中空筒体。
在其中电气转换器将包括八个电子板的变型中,它会形成具有八角形基部的筒体。如果它包括五个电子板,它会形成带有五边形基部的筒体。在其中电气转换器将包括单个电子板的变型中,它可以形成具有圆形基部的中空圆筒体,其中电力电子板具有环形形状,在与径向方向D
电子板1800面对壳体20的内表面204定位以最大化电子电力部件的冷却。
过滤装置16包括其上安装有电容器162的电子过滤板160。
在图2所示的实施例中,过滤装置16的电子过滤板160具有六边形形状,允许其插入由电子转换器180的电子板1800形成的中空筒体中。电子板160的六边形形状与由电气转换器180的电力电子板1800形成的中空筒体的六边形横截面协配,这允许将电子过滤板160调整为尽可能靠近电子电力板1800。电容器162和电子板160容纳在电气转换器180的中空筒体中。
电气转换器180的每个电子板1800包括至少一个连接端子1802,该连接端子1802在包括径向方向D
另外,电子控制单元18包括构造成控制电动机12的操作的电子控制板182。在图2所示的实施例中,该电子控制板182包括在径向平面中延伸的六边形形状,该径向平面包括径向方向D
智能马达10还包括容纳在壳体20内部并与电子控制板182连通的电子监控板26。电子监控板在径向平面中延伸,该径向平面包括径向方向D
在该轴向构造中,冷却设备24在电动机12与包括过滤装置16和电子控制单元18的智能马达10的电子部分之间共享。由叶轮14的叶片140递送的冷却空气流F沿壳体20的径向外表面203循环并与冷却设备24的翅片240流体连通。壳体20的径向外表面203回收由电动机12产生的热量和由电子部分产生的热量,特别是由电力转换器180产生的热量,并将卡路里特别是经由翅片240传递到冷却空气流F,然后空气流F将卡路里排放到智能马达10外部。
如图3所示,智能马达10的电动机12是同步电机,包括永磁体转子121和具有星形电气联接的三个第一绕组1230的第一三相组件123的六相定子122,以及星形电气联接的三个第二绕组1240的第二三相组件124。
同步电机12的电子控制单元18包括装备有六个独立臂1840的控制逆变器184,每个臂1840构造成控制电动机12的六相定子的一相。星形连接的绕组的两个三相组件123和124彼此磁性和电气地解耦。
为了具有彼此电气和磁性独立的第一和第二三相组件123和124,缠绕第一三相星形连接组件123的绕组1230,然后,在第一三相组件123的绕组1230的缠绕之后,缠绕第二三相星形连接组件124的绕组1240。
定子122包括齿圈。第一绕组1230和第二绕组1240中的每一个围绕齿圈的单个齿缠绕,这允许最小化定子122的尺寸,特别是绕组1230和1240中的每一个的头部的尺寸。
转子121包括以哈尔巴赫阵列定位的磁体以增加智能马达10的每单位质量的扭矩。
第一三相组件123的第一绕组1230定位在延伸超过180°机械的定子的第一角度范围内,并且第二组件124的第二绕组1240定位在延伸超过180°机械的定子的第二角度范围内。第一角度范围不同于第二角度范围,因此每个角度范围都涵盖半圆,这允许最大化磁解耦并促进两个三相组件123和124之间的电气隔离。
电子控制单元18还包括每个三相组件123和124中的电流调节模块,以及转子速度调节模块121。
智能马达10还包括连接接口17,其将直流高压电源总线连接到电子控制单元18的逆变器184的六个臂1840中的每一个。连接接口17包括以装备有差模电容器的电容解耦级形式产生的过滤装置16。在图2所示的实施例中,连接接口17与电子过滤板160重合。
在图3所示的实施例中,每个电力电子板1800包括功率晶体管1845、逆变器184的电子保护元件、直流高压总线的相电流传感器和电压传感器。
在图4中示出了根据本发明第二实施例的电动机12'。在电动机12'的第二实施例中,同步电机12'包括两个定子1221和1222以及两个定子1221和1222共用的转子121。
每个定子1221和1222磁性和电气地独立于另一个定子1222和1221。并且每个定子1221和1222包括独立于第二三相绕组组件的第一三相绕组组件。
在图5中示出了根据本发明第三实施例的电动机12”。在电动机12”的第三实施例中,同步电机12”包括四个定子1221、1222、1223和1224以及第一和第二转子1211和1212。第一转子1211为两个第一定子1221和1222共用,而第二转子1212为两个第二定子1223和1224共用,两个彼此第一定子1221和1222与两个第二定子1223和1224不同,并且每个定子磁性和电气地独立。
因此,本发明提供了一种智能马达解决方案的架构,其允许提高马达的每单位质量的功率,以用于需要包括其动力和控制电子的轻型且强大电动马达的应用,并保证机械扭矩的供应:
-在用于具有单定子构造、带单转子的多定子构造或带双转子的多定子构造的智能马达的定子星形电压逆变器臂发生故障的情况下,或
-在用于具有带单转子的多定子构造或带双转子的多定子构造的智能马达的定子之一发生故障的情况下。
- 具有解耦的多绕组的智能电动马达
- 具有解耦多重绕组的智能马达的电气滤波系统以及相关的智能马达