磁传感器单元
文献发布时间:2023-06-19 11:55:48
技术领域
本公开涉及用于对旋转轴的旋转角进行检测的磁传感器单元。
背景技术
对旋转轴的旋转角进行检测的磁传感器单元为了抑制外部磁场的影响而具备磁屏蔽件。例如,在专利文献1中,公开了在磁体配置磁轭来得到磁通密度增加和磁屏蔽效果的构造。在专利文献2中,公开了设置有覆盖磁体、磁传感器的屏蔽壳体的结构。
在先技术文献
专利文献
专利文献1:日本特开2007-263585号公报
专利文献2:日本特开平2-99823号公报
发明内容
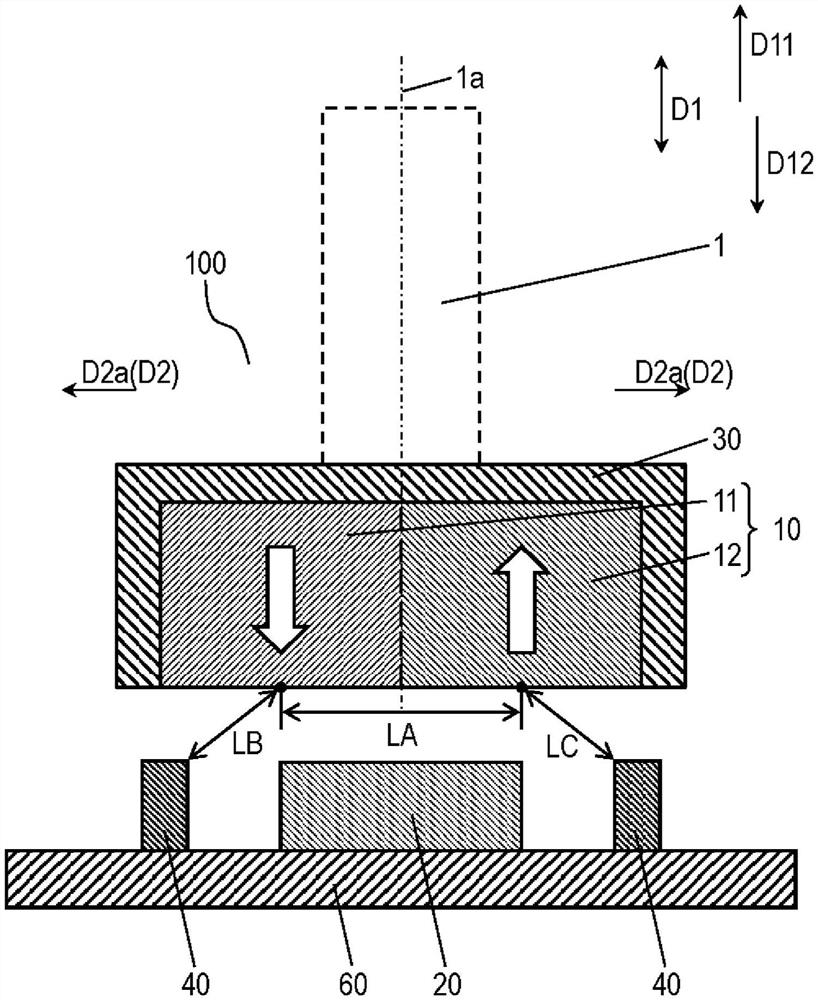
磁传感器单元具备:磁体;磁传感器,被配置为与磁体的下表面对置;磁屏蔽件,在与磁传感器的上下方向交叉的侧方向包围磁传感器;和磁轭,覆盖磁体的上表面和侧面。磁体具有在上下方向磁化的第1磁化区域、在与第1磁化区域相反的方向磁化的第2磁化区域。第1磁化区域和第2磁化区域在磁体的下表面分别形成第1和第2磁极。从第1磁极的中心到第2磁极的中心的距离LA、从第1磁极的中心到磁屏蔽件的距离LB、从第2磁极的中心到磁屏蔽件的距离LC满足LA<LB+LC的关系。
该磁传感器单元具有磁屏蔽性并且小型。
附图说明
图1是实施方式中的磁传感器单元的示意剖视图。
图2是实施方式中的磁传感器单元的磁传感器的剖视图。
图3是图2所示的磁传感器的电路模块的框图。
图4是表示图2所示的磁传感器的控制电路中的信号处理动作的图。
图5是表示各种磁传感器的磁场强度与角度精度的关系的图。
图6是实施方式中的磁传感器单元的磁体的仰视图。
图7是图6所示的磁体的线VII-VII处的剖视图。
图8是表示实施方式中的磁体的磁场分布的图。
图9是表示实施方式中的磁体的下表面的磁密度分布的图。
图10是表示实施方式中的磁体的磁化方法的图。
图11是表示实施方式中的装配有磁轭的磁体的磁场分布的图。
图12是图1所示的磁传感器单元的放大剖视图。
图13是实施方式中的其他磁传感器单元的放大剖视图。
具体实施方式
以下,使用附图来对本公开的实施方式所涉及的磁传感器单元进行说明。另外,以下说明的实施方式均表示本公开的优选的一具体例。因此,以下的实施方式所示的形状、结构要素、结构要素的配置以及连接方式等是一个例子,并不是旨在限定本公开。因此,针对以下的实施方式中的结构要素之中、未记载于表示本发明的最上位概念的独立权利要求的结构要素,说明为任意的结构要素。
此外,各附图是示意图,未必是严格进行图示的附图。各附图中,针对实质相同的构造赋予相同的符号,将重复的说明省略或者简化。
图1是实施方式中的磁传感器单元的剖视图。磁传感器单元100具有磁体10、磁传感器20、磁轭30、磁屏蔽件40。磁体10与沿着在上下方向D1延伸的旋转轴线1a延伸的旋转轴1的前端连接,与旋转轴1一起旋转。磁传感器20对作为磁体10与磁传感器20之间的区域的检测区域中的磁体10所形成的磁场即检测磁场的方向进行检测。磁屏蔽件40遮挡从磁传感器单元100的外部起作用的外部磁场,使其不透过磁屏蔽件40防止到达磁传感器20。磁轭30使磁体10中的施加于磁传感器20的磁通密度增加。
图2是磁传感器20的剖视图。磁传感器20具有磁阻元件21和电路元件22。在图2中,作为磁传感器20的具体构造,磁阻元件21与电路元件22作为一个例子而表示配置于树脂成形体23的内部并一体化的构造。电路元件22被安装于芯片焊盘24上。磁阻元件21被安装于电路元件22上。磁阻元件21与电路元件22通过接合线25而电连接。电路元件22通过接合线25而与引线26连接。
图3是磁传感器20的电路模块的框图。图4是表示电路模块中的信号处理动作的图。磁阻元件21具有包含磁阻MR1~MR8的桥接电路BR1和桥接电路BR2。磁阻MR1~MR8具有根据被施加的磁场而变化的电阻。桥接电路BR1、BR2是惠斯通桥接电路。桥接电路BR1具有:在连接点N13相互串联连接的磁阻MR1、MR2所构成的串联体BR1a、在连接点N14相互串联连接的磁阻MR3、MR4所构成的串联体BR1b。串联体BR1a、BR1b在连接点N11、N12之间与连接点N11、N12相互并联连接。桥接电路BR2具有:在连接点N23相互串联连接的磁阻MR5、MR6所构成的串联体BR2a、在连接点N24相互串联连接的磁阻MR7、MR8所构成的串联体BR2b。串联体BR2a、BR2b在连接点N21、N22之间与连接点N21、N22相互并联连接。连接点N11、N21与基准电位Vc连接,连接点N12、N22与接地(GND)连接。另外,磁阻MR1~MR8由各向异性磁阻形成。各向异性磁阻能够通过包含铁-镍合金的具有磁阻效应的金属图案构成。各向异性磁阻的电阻根据检测磁场的朝向以及大小的变化而变化。电路元件22对桥接电路BR1的连接点N13、N14的电位、桥接电路BR2的连接点N23、N24的电位进行检测。
在磁传感器20中,也可以取代桥接电路BR1,仅使用串联体BR1a和串联体BR1b的任一个。也可以取代桥接电路BR2,仅使用串联体BR2a和串联体BR2b的任一个。例如,在磁传感器20不具有串联体BR1b、BR2b而具有串联体BR1a、BR2a的情况下,电路元件22对连接点N13、N23的电位进行检测。
使用了各向异性磁阻的磁传感器相比于使用了其他元件的磁传感器,能够检测到磁场强度较大的区域。并且,具有随着磁场强度变大而输出波形的变形被去除、所检测的电信号接近于理想值的特性。因此,在磁场强度较大的区域,使用了各向异性磁阻(AMR)的磁传感器相比于使用了巨型磁阻(GMR)的磁传感器、使用了隧道效应磁阻(TMR)的磁传感器、使用了霍尔元件(Hall元件)的磁传感器,具有较高的角度检测精度。
图5中表示对使用了不同种类的元件的磁传感器施加的磁场的强度与检测出的角度的精度的关系。如图5所示,使用了AMR的磁传感器随着磁场强度变大而检测的角度精度变高。使用了GMR的磁传感器在磁场强度为80mT以上时所检测的角度精度变低。这是由于GMR所具有的pin层理想发挥作用的磁场强度区域为60~80mT而产生的课题。使用了TMR的磁传感器在磁场强度为80mT以上时所检测的角度精度变低。这也是由于TMR元件所具有的pin层理想发挥作用的磁场强度区域为30~50mT所产生的课题。使用了Hall元件的磁传感器由于检测输出较小因此需要多级的放大处理。因此,存在相对于检测磁场的变动而测定角度的偏差变大的课题。因此,使用了各向异性磁阻的磁传感器由于能够较大设定检测磁场,因此干扰磁场的影响相对变小。其结果,磁传感器能够进行S/N较大的高精度的检测。
桥接电路BR1的磁阻MR1与磁阻MR2的串联体、磁阻MR3与磁阻MR4的串联体在基准电位Vc与接地GND之间串联连接。从磁阻MR1、MR2之间中间电位即连接点N13的电位被输出为检测信号sin+。从磁阻MR3、MR4之间中间电位即连接点N14的电位被输出为检测信号sin-。
桥接电路BR2的磁阻MR5与磁阻MR6的串联体、磁阻MR7与磁阻MR8的串联体在基准电位Vc与接地GND之间并联连接。从磁阻MR5、MR6之间中间电位即连接点N23的电位被输出为检测信号cos+。从磁阻MR7、MR8之间中间电位即连接点N24的电位被输出为检测信号cos-。
另外,桥接电路BR1与桥接电路BR2被配置为:相对于检测磁场的旋转,检测信号cos+的相位从检测信号sin+偏离90°,检测信号cos-的相位从检测信号sin-偏离90°。
电路元件22具有差动放大器27a、27b和运算处理部28。另外,在电路元件28的说明中,仅说明本公开的说明上必须的最小结构,并不限定于该结构。
从桥接电路BR1输出的信号sin+和信号sin-被输入至差动放大器27a。差动放大器27a根据输入的信号sin+和信号sin-而生成并输出放大信号sin。在实施方式中,差动放大器27a将从信号sin+减去信号sin-而得到的差生成为放大信号sin。
从桥接电路BR2输出的信号cos+和信号cos-被输入至差动放大器27b。差动放大器27b根据输入的信号cos+和信号cos-而生成并输出放大信号cos。在实施方式中,差动放大器27b将从信号cos+减去信号cos-而得到的差生成为放大信号cos。
从差动放大器27a输出的信号sin和从差动放大器27b输出的信号cos被输入至运算处理部28。运算处理部28对输入的信号sin和信号cos进行arctan运算。运算处理部28输出被进行arctan运算处理的信号arctan。在实施方式中,运算处理部28将信号cos除以信号sin得到的商输出为信号arctan。磁传感器20从电路元件22输出信号arctan。信号arctan具有包含磁体10的旋转角的旋转信息。
图6是磁体10的仰视图。图7是图6所示的磁体10的线VII-VII处的剖视图。磁体10包含具有圆形状的上表面10a和下表面10b的圆板形状的永磁体。磁体10具有连结于上表面10a和下表面10b并且整体上包围上表面10a和下表面10b的侧面10c。磁体10具有相互连结的磁化区域11和磁化区域12。磁化区域11是在俯视下将磁体10二分割的一个半圆部分。磁化区域12是在俯视下磁体10中的另一个半圆部分。磁化区域11、12在与上下方向D1正交的并设方向D2a排列。
磁化区域11在上下方向D1之中的下方向D12的磁化方向11d被磁化。磁化区域11的上侧的区域11a为S极,磁化区域11的下侧的区域1 1b为N极。
磁化区域12在上下方向D1之中的上方向D11的磁化方向12d被磁化。磁化区域12的磁化方向12d是与磁化区域11的磁化方向11d相反的朝向。磁化区域12的下侧的区域12b为S极,磁化区域12的上侧的区域12a为N极。另外,图中通过虚线来区分各区域,但区域是通过磁极的分布而被区分的。如图7所示,磁化区域11在磁体10的下表面10b形成N极即磁极P1b,磁化区域12在磁体10的下表面10b形成作为磁极P1b的相反的极性的S极即磁极P2b。同样地,磁化区域11在磁体10的上表面10a形成S极即磁极P1a,磁化区域12在磁体10的上表面10a形成作为磁极P1a的相反的极性的N极即磁极P2a。
图8中表示磁体10的磁场分布。磁体10的图中上表面侧的磁力线Ma从磁化区域12中的区域12a的磁极P2a朝向磁化区域11中的区域11a的磁极P1a。磁体10的图中下表面侧的磁力线Mb从磁化区域11中的区域11b的磁极P1b朝向磁化区域12中的区域12b的磁极P2b。磁体10的图中左侧的磁力线Mc1从磁化区域11中的区域11b朝向区域11a。磁体10的图中右侧的磁力线Mc2从磁化区域12中的区域12a朝向区域12b。这样,磁体10的磁场分布向侧方的扩散较小。
图9中表示磁体10的下表面10b处的磁密度分布。如图9所示,磁化区域11的磁极P1b的中心11c是磁化区域11的磁极P1b中的磁密度最大的部分。磁化区域12的磁极P2b的中心12c是磁化区域12的磁极P2b中的磁密度最大的部分。磁极P1b的中心11c能够视为位于距磁化区域11、12排列的并设方向D2a上的磁体10的下表面10b的中心为下表面10b的半径Rr的1/2的距离的位置。磁的中心12c能够设为位于距并设方向D2a上的下表面10b的中心为半径Rr的1/2的距离的位置。
图10中通过示意图来表示磁体10的磁化方法的一个例子。通过将铁氧体等的磁性材料构成为圆板状的磁性体10x磁化从而能够使磁体10磁化。磁化装置50具备磁化部51和磁化部52。图中左侧的磁化部51能够向磁性体10x的左侧半部分施加向下的磁场51a。图中右侧的磁化部52能够对磁性体10x的右侧半部分施加向上的磁场52a。通过使用磁化装置50来将磁性体10x磁化,能够形成具有图7所示的极性的磁体10。
图11表示装配有磁轭30的磁体10的磁场分布。磁轭30包含纯铁等的强磁性体。磁轭30被配置为覆盖上表面10a和侧面10c的整体以使得抵接于磁体10的上表面10a和侧面10c。换句话说,覆盖除了磁体10的与磁传感器20对置的下表面10b以外的磁体10的外表面。通过由磁轭30覆盖磁体10,被覆盖的部分的磁场通过磁轭30的内部,可抑制磁场的扩散。进一步地,在磁体10露出的下表面10b,检测磁场Md的磁通密度变大。例如,对装配有磁轭30的磁体10、未装配磁轭30的磁体10、未装配磁轭30的2极磁体中的检测区域处的磁场强度进行比较。在与磁体分离3mm的检测区域,装配有磁轭30的磁体10的磁场强度表示120mT左右。未装配磁轭30的磁体10的磁场强度表示90mT左右。未装配磁轭30的2极磁体的磁场强度表示40mT左右。由此,能够通过本公开中的装配有磁轭30的磁体10,向磁传感器20施加较大的检测磁场Md。
通过向磁传感器20施加的检测磁场Md的磁场强度变大,干扰磁场的影响相对变小。其结果,磁传感器20能够进行S/N较大的高精度的检测。但是,由于检测磁场Md变大,优选对磁传感器20使用各向异性磁阻。
磁屏蔽件40包含纯铁等的强磁性体。磁屏蔽件40被配置为在与磁传感器20的上下方向D1直角地交叉的侧方向D2包围磁传感器20。磁屏蔽件40具有在俯视下包围磁传感器20的环状。图12是磁传感器单元100的放大剖视图。磁化区域11的磁极P1b的中心11c与磁化区域12的磁极P2b的中心12c分离距离LA。磁化区域11的磁极P1b的中心11c与磁屏蔽件40分离距离LB。磁化区域12的磁极P2b的中心12c与磁屏蔽件40分离距离LC。在磁传感器单元100中,距离LA、LB、LC满足LA<LB+LC的关系。通过磁体10与磁屏蔽件40的位置关系满足该关系,能够使磁屏蔽件40小型。
即,磁传感器单元100中的检测磁场Md如图11所示,从磁极的中心11c朝向磁极的中心12c。形成检测磁场Md的检测区域形成于空气中,因此检测区域的磁导率为1。另一方面,磁屏蔽件40通过强磁性体形成,其磁导率超过1000。因此,能够忽略磁屏蔽件40所具有的磁阻的影响。因此,从磁极P1b的中心11c至磁极P2b的中心12c的空气中的磁阻比从磁极P1b的中心11c经由磁屏蔽件40而至磁极P2b的中心12c的磁阻小。由此,可抑制由磁体10形成的磁场所导致的磁屏蔽件40的磁饱和,因此能够实现磁屏蔽件40的径向上的小型化。具体地说,通过满足上述的LA<LB+LC的关系,如图1所示,能够将俯视下磁屏蔽件40的外周端配置于比磁轭30的外周端更靠内侧。
另外,虽然磁屏蔽件40与磁体10之间存在间隙,但外部磁场Me被磁导率较大的磁屏蔽件40、磁轭30吸收,因此对检测区域没有带来影响。
此外,这样,通过使磁屏蔽件40小型化,磁传感器20和磁屏蔽件40能够安装于基座基板60。由此,能够抑制磁传感器20与磁屏蔽件40的间隔的偏差。换句话说,在多个磁传感器单元100的组装中,能够减小各个磁传感器单元100中的检测精度的偏差。
专利文献1中公开的磁轭包含强磁性体的金属,能够得到检测磁场的增强效果。但是,磁轭由于磁体的磁场而磁饱和,因此不能期望磁屏蔽件效果。专利文献2中公开的屏蔽壳体为了抑制对磁体的磁场的影响,需要与检测磁体分离,装置大型化。
接下来,对磁传感器单元100的变形例进行说明。
(变形例)
图13是实施方式中的变形例即其他磁传感器单元200的放大剖视图。在图13中,对与图1至图12所示的磁传感器单元100相同的部分赋予相同的参照符号并简化说明。此外,磁传感器单元200取代磁传感器单元100的磁屏蔽件40而具备磁屏蔽件70,关于磁屏蔽件70的其他构造,与磁传感器单元100相同。
磁传感器单元200中的磁屏蔽件70的内径比磁轭30的外径大,被配置为在俯视下磁屏蔽件70包围磁轭30的外周。此外,构成为磁屏蔽件70的上端位于比磁轭30的下端更靠上方。换句话说,在磁传感器单元200中,检测区域被磁屏蔽件70包围。另外,磁屏蔽件70与磁轭30对置的宽度局部较窄的部分RL形成迷宫式构造。通过磁屏蔽件70与磁轭30所形成的迷宫式构造,能够防止铁粉等的尘埃从磁传感器单元200的外部空间侵入到检测区域。
另外,在由磁屏蔽件70包围磁轭30的构造中,若磁屏蔽件70的内周与磁轭30的外周的间隔LR较大,则防尘效果变小。此外,若间隔LR较小,则磁传感器单元200的组装变得困难。另外,将这些条件具体化中,通过磁屏蔽件70的内径LD、磁轭30的外径LE、上下方向D1上的从磁轭30的下端到磁屏蔽件70的上端的高低差LF、上下方向D1上的磁体10的高度LG满足LE×1.5>LD>LE×1.2和LG×0.5>LF>0这两个条件,能够兼顾防尘效果和组装容易性。
另外,在磁屏蔽件70的构造中,也满足通过磁传感器单元100而说明的LA<LB+LC关系,可抑制磁屏蔽件70的磁饱和。此外,与磁轭30相接的磁体10的上表面10a和侧面10c的磁场如图11所示,被封闭于磁轭30的内部。因此,只要磁屏蔽件70与磁轭30不接触,就可抑制磁屏蔽件70的磁饱和。
在实施方式中,“上表面”“下表面”“上下方向”“俯视”等表示方向的用语表示仅通过磁体、磁传感器等的磁传感器单元的所谓钢制构件的相对位置关系而决定的相对方向,不表示铅垂方向等的绝对方向。
产业上的可利用性
本公开中的磁传感器单元具有磁屏蔽性并且小型,特别在车载用途的磁传感器单元中有效。
-符号说明-
1 旋转轴
1a 旋转轴线
10 磁体
11、12 磁化区域
20 磁传感器
30 磁轭
40、70 磁屏蔽件
60 基座基板
100、200 磁传感器单元
P1a、P1b、P2a、P2b 磁极
MR1~MR8 磁阻
BR1、BR2 桥接电路
BR1a、BR1b、BR2a、BR2b 串联体。
- 一种谐振型磁传感器敏感单元及数字频率输出磁传感器
- 半导体装置、磁传感器和磁传感器单元