递送系统的稳定器
文献发布时间:2023-06-19 11:57:35
技术领域
本文公开的某些实施例总体上涉及用于假体的递送系统,并且在一些实施例中涉及与通过经中隔(transseptal)方法用于递送置换心脏瓣膜的递送系统一起使用的稳定器。
背景技术
人的心脏瓣膜包括主动脉瓣膜、肺动脉瓣、二尖瓣膜和三尖瓣,其基本上起着与泵送心脏同步操作的单向瓣膜的作用。这些瓣膜允许血液向下游流动,但阻止血液向上游流动。患病的心脏瓣膜表现出诸如瓣膜变窄或反流等损害,从而阻碍了瓣膜控制血液流动的能力。这种损害会降低心脏的泵血效率,并可能使人衰弱和威胁生命。例如,瓣膜功能不全可导致诸如心脏肥大和心室扩张的状况。因此,已经进行了广泛的努力来开发修复或置换受损的心脏瓣膜的方法和设备。
存在假体以纠正与受损的心脏瓣膜有关的问题。例如,机械和基于组织的心脏瓣膜假体可用于替代受损的天然心脏瓣膜。最近,已经投入了大量的努力来开发置换心脏瓣膜,特别是基于组织的置换心脏瓣膜,与通过开放式心脏手术相比,这种基于组织的置换心脏瓣膜的递送对患者的创伤较小。置换瓣膜被设计为可通过微创手术程序甚至经皮手术程序进行递送。这样的置换瓣膜通常包括基于组织的瓣膜主体,该基于组织的瓣膜主体连接到可膨胀框架,然后其被递送到天然瓣膜的环。
假体的开发(包括但不限于,置换心脏瓣膜能够被压紧以进行递送,然后被可控地膨胀以进行受控放置)已被证明是特别具有挑战性的。另一挑战涉及以防止创伤的方式将这种假体相对于腔内组织(例如任何体腔或腔内的组织)固定的能力。
将假体递送至人体中的期望位置,例如将置换心脏瓣膜递送至二尖瓣,也具有挑战性。获得在心脏或其他解剖位置执行程序的途径可能需要通过弯曲的脉管系统或通过开放式或半开放式的手术程序经皮地递送装置。控制递送系统的位置以及假体在期望位置处部署的能力也具有挑战性。
发明内容
本公开包括但不限于以下实施例。
实施例1:一种用于递送系统的稳定器。所述稳定器可以包括细长主体。所述细长主体可以包括近端和远端以及在所述近端和所述远端之间延伸的纵向轴线。所述细长主体可以包括在所述近端和所述远端之间延伸的大致平坦的基板。所述细长主体可以包括第一成角度的表面。所述第一成角度的表面可以位于所述基板的顶部上。所述第一成角度的表面可以朝着所述远端向下倾斜。所述细长主体可以包括第二成角度的表面。所述第二成角度的表面可以位于所述基板的顶部上。所述第二成角度的表面可以在纵向上与所述第一成角度的表面间隔开并且在所述第一成角度的表面的近侧。所述第二成角度的表面可以朝着所述远端向下倾斜。所述稳定器可以进一步包括毂套。所述毂套可以附接在所述第一成角度的表面的顶部上。所述毂套可以包括从所述第一成角度的表面向上延伸的延伸部。所述延伸部可以被配置为可释放地保持所述递送系统的护套毂。所述稳定器可以进一步包括手柄托架。所述手柄托架可以在所述第二成角度的表面的顶部上。所述手柄托架可以包括可附接至所述第二成角度的表面的轨道和被配置为沿所述轨道纵向行进的递送系统夹具。所述递送系统夹具可以被配置为可释放地保持所述递送系统的手柄。所述稳定器可以进一步包括基座适配器,其中所述主体的所述远端被配置为可释放地与所述基座适配器连接。
实施例2:根据实施例1所述的稳定器,其进一步包括一对附接夹具,其中所述一对附接夹具中的每个均不具有任何尖锐的端部。
实施例3:根据实施例1或实施例2所述的稳定器,其中所述基座适配器包括一对向近侧延伸的臂和上凸耳,所述上凸耳被配置为接收所述主体的向远侧延伸的凸耳以防止所述主体向上运动。
实施例4:根据实施例1至3中任一项所述的稳定器,其中所述第一成角度的表面和所述第二成角度的表面被配置为相对于所述平坦的基板独立地成角度地调节。
实施例5:根据实施例1至4中任一项所述的稳定器,其中所述手柄托架包括:第一旋钮,其被配置为沿着所述壳体纵向平移所述递送系统夹具;和第二旋钮,其被配置为打开和关闭所述递送系统夹具。
实施例6:根据实施例1至5中任一项所述的稳定器,其进一步包括位于所述壳体内的行进螺杆,其中所述递送系统夹具的一部分位于所述壳体内并与所述行进螺杆相接。
实施例7:根据实施例1至6中任一项所述的稳定器,其中所述第一成角度的表面相对于所述基板的高度小于所述第二成角度的表面相对于所述基板的高度。
实施例8:根据实施例1至6中任一项所述的稳定器,其中所述第一成角度的表面在所述第一成角度的表面的顶表面上具有与所述第二成角度的表面上的顶表面大致相同的角度。
实施例9:根据实施例1至8中任一项所述的稳定器,其中所述第一成角度的表面和所述第二成角度的表面各自具有在5度和30度之间的角度。
实施例10:根据实施例1至9中任一项所述的稳定器,其中所述延伸部包括一对臂。
实施例11:根据实施例10所述的稳定器,其中所述一对臂包括弹簧柱塞,所述弹簧柱塞被配置为保持所述护套毂。
实施例12:根据实施例1至11所述的稳定器,其中马达被配置为沿着所述轨道平移所述递送系统夹具,并且其中所述马达被配置为打开和关闭所述递送系统夹具。
实施例13:根据实施例12所述的稳定器,其中所述马达被配置为远程操作。
实施例14:一种稳定器系统,其包括根据实施例1至13中任一项所述的稳定器,并且进一步包括一对附接夹具,所述一对附接夹具被配置为将所述主体附接至基座;所述一对附接夹具中的第一附接夹具可附接至所述基座适配器;并且所述一对附接夹具中的第二附接夹具可附接至所述主体。
实施例15:一种稳定器系统,其包括根据实施例1至13中任一项所述的稳定器,并且进一步包括递送系统。
实施例16:根据实施例15所述的稳定器系统,其中所述递送系统包括手柄,其中所述递送系统的在所述手柄的远侧的一部分可释放地被保持在所述毂套内,并且所述手柄可释放地被保持在所述手柄托架的所述递送系统夹具内。
实施例17:根据实施例15或实施例16所述的稳定器系统,其中所述递送系统被配置为用于置换二尖瓣心脏瓣膜的经中隔递送。
实施例18:一种稳定器系统,其包括实施例1至17中任一项所述的稳定器,并且进一步包括具有大致平坦的上表面和向下延伸的多个支腿的基座。
实施例19:根据实施例18所述的稳定器系统,其中所述稳定器被配置为夹持在所述基座的所述大致平坦的上表面上。
实施例20:根据实施例18或实施例19所述的稳定器系统,并且进一步包括大致平坦的板,其中所述多个支腿被配置为位于所述大致平坦的板上。
实施例21:根据实施例18至20中任一项所述的稳定器系统,其中所述稳定器被配置为磁性地附接至所述基座的所述大致平坦的上表面。
实施例22:根据实施例21所述的稳定器系统,其中所述磁性地附接包括电磁附接。
实施例23:一种用于递送系统的稳定器。所述稳定器可以包括主体,所述主体包括近端、远端以及在所述近端和所述远端之间延伸的纵向轴线。所述稳定器可以包括手柄托架。所述手柄托架可以被提供在沿着所述主体的近侧位置处。所述手柄托架可以包括成角度的轨道,所述成角度的轨道朝着所述主体的所述远端向下倾斜。所述手柄托架可以包括被配置为沿着所述轨道纵向行进的递送系统夹具。所述递送系统夹具可以被配置为可释放地保持所述递送系统的手柄。所述稳定器可以包括套件。所述套件可以被定位在沿着主体的远侧位置处。所述套件可以被配置为可释放地保持所述递送系统的一部分。
实施例24:根据实施例23所述的稳定器,其中所述主体包括:第一成角度的表面,其被配置为支撑所述套件;和第二成角度的表面,其在所述第一成角度的表面的近侧,并且被配置为支撑所述手柄托架。
实施例25:根据实施例23或实施例24所述的稳定器,其进一步包括可释放地附接至所述主体的基座适配器。
实施例26:一种使用前述实施例中任一项所述的稳定器来控制递送系统的方法。
实施例27:一种用于递送系统的通用稳定器,所述通用稳定器包括:纵向延伸的导轨,其具有面朝上的表面和面朝下的表面;固定夹具,其附接至所述纵向延伸的导轨的所述面朝下的表面;可移动夹具,其附接至所述纵向延伸的导轨的所述面朝下的表面,并且与所述固定夹具纵向间隔开,其中所述可移动夹具被配置为沿着所述纵向延伸的导轨平移;以及导轨坞,其附接至所述纵向延伸的导轨的所述面朝上的表面,所述导轨坞被配置为与所述导轨坞的面朝上的表面上的递送系统保持器配合,其中所述导轨坞被配置为沿着所述纵向延伸的导轨平移。
实施例28:根据实施例27所述的通用稳定器,其中所述导轨是皮卡汀尼(picatinny)导轨。
实施例29:根据实施例27或28所述的通用稳定器,其中所述可移动夹具包括旋钮,所述旋钮被配置为调节所述可移动夹具的纵向方位。
实施例30:根据实施例27至29中任一项所述的通用稳定器,其中所述导轨坞包括连接至所述导轨坞的相对侧上的板的手柄,其中所述手柄的激活防止所述导轨坞在所述纵向延伸的导轨上平移。
实施例31:根据实施例27至30中任一项所述的通用稳定器,其中所述递送系统保持器包括手柄托架,所述手柄托架包括轨道和被配置为沿着所述轨道纵向行进的递送系统夹具,其中所述递送系统夹具被配置为可释放地保持递送系统的手柄。
实施例32:根据实施例27至31中任一项所述的通用稳定器,其中所述纵向延伸的导轨进一步包括第一对向外延伸的突起和第二对向外延伸的突起,在所述第一对向外延伸的突起之间形成第一腔,在所述第二对向外延伸的突起之间形成第二腔,所述第一对向外延伸的突起与所述第二对向外延伸的突起位于所述导轨的相对侧。
实施例33:根据实施例27至32中任一项所述的通用稳定器,其进一步包括第二导轨坞,所述第二导轨坞附接至所述纵向延伸的导轨的所述面朝上的表面并且与所述导轨坞间隔开,所述第二导轨坞被配置为与所述第二导轨坞的面朝上的表面上的第二递送系统保持器配合,其中所述第二导轨坞被配置为沿着所述纵向延伸的导轨平移。
实施例34:一种用于具有带有多个致动器的手柄的递送装置的电动控制稳定器系统,所述系统包括被配置为独立地操作所述多个致动器中的每个的旋钮控制系统和被配置为平移所述递送装置的所述手柄的手柄控制系统,所述旋钮控制系统包括:被配置为至少部分地容纳所述手柄的容器;位于所述容器内并被配置为将所述手柄保持在适当位置的多个固定区段;位于容器内的多个辊区段,所述多个辊区段中的每一个均包含至少一个辊;以及被配置为独立地操作所述多个辊区段中的每一个中的至少一个辊的马达,其中所述多个辊区段中的每一个中的至少一个辊被配置为当操作所述至少一个辊时操作所述多个致动器中的一个致动器,所述手柄控制系统包括:带子,所述带子被配置为至少部分地围绕所述容器并且在所述带子平移时旋转所述容器和手柄;连接至所述带子的支架;以及与所述支架连通的轨道,其中所述支架被配置为沿着所述轨道平移。
实施例35:根据实施例34所述的电动控制稳定器系统,其进一步包括控制器,所述控制器用于电子地操作所述电动控制稳定器系统。
实施例36:根据实施例34或35所述的电动控制稳定器系统,其中所述容器包括远侧孔,并且其中从所述递送装置的所述手柄延伸的轴被配置为延伸穿过所述远侧孔。
附图说明
图1A至图1B示出用于递送系统的稳定器的实施例。
图2示出可以与图1的稳定器一起使用的基座的实施例。
图3示出可以与图2的基座结合使用的板的实施例。
图4至图5示出可以与稳定器一起使用的夹具的实施例。
图6示出移除某些部件的稳定器主体的实施例。
图7至图8示出稳定器主体的远端和基座适配器的实施例。
图9至图11示出毂套装配件的实施例。
图12至图14示出线性夹具装配件的实施例。
图15A至图15C示出用于递送系统的夹具的实施例。
图16至图18示出稳定器的实施例,其中递送系统被保持在稳定器中的不同位置。
图19示出通用导轨系统的实施例。
图20A至图20F示出导轨坞的实施例。
图21A至图21C示出导轨的实施例。
图22A至图22B示出可替代的导轨横截面的实施例。
图23示出导轨和固定夹具的实施例。
图24A至图24C示出附接至不同表面的固定夹具的实施例。
图25示出可移动夹具的实施例。
图26A至图26B示出附接至表面的可移动夹具的实施例。
图27示出具有翼的导轨的实施例。
图28示出通用导轨系统的实施例。
图29示出电动旋钮递送系统旋转机构。
图30示出电动递送系统旋转机构。
具体实施方式
本说明书和附图在置换心脏瓣膜、递送系统和方法的多个实施例的背景下提供了本公开的多个方面和特征,该置换心脏瓣膜、递送系统和方法被配置为用于患者的脉管系统中,例如用于置换患者体内的天然心脏瓣膜。这些实施例可以结合置换特定的瓣膜(诸如患者的主动脉瓣、三尖瓣或二尖瓣)来讨论。然而,应当理解,本文所讨论的特征和概念可以应用于除心脏瓣膜植入物之外的产品。例如,本文所描述的受控的方位、部署和固定特征可以应用于医疗植入物(例如其他类型的可膨胀假体),以在身体的其他地方使用,例如在动脉、静脉或其他体腔或位置内使用。另外,瓣膜、递送系统等的特定特征不应被视为限制性的,并且本文所讨论的任何一个实施例的特征可以根据需要并在适当时与其他实施例的特征组合。尽管本文所描述的某些实施例是结合经股动脉(或经中隔)递送方法进行描述的,但是应当理解,这些实施例可以用于其他递送方法,例如经心尖或经颈静脉的方法。而且,应当理解,结合一些实施例所描述的某些特征可以与其他实施例结合,包括结合不同的递送方法描述的那些实施例。
图1A至图1B示出稳定器100的实施例,当使用递送系统时,该稳定器可以用于将递送系统的实施例保持在恰当的位置。在美国专利公开号2017/005616、2016/0317301、2017/005617和2019/0008640中详细地描述了可以与稳定器一起保持的递送系统的示例,上述专利申请中每个的全部内容通过整体引用并入本文。通过允许稳定器内的递送系统的精细马达控制,所公开的稳定器100对于用于递送置换心脏瓣膜的经中隔(例如经股动脉)的方法是有利的。然而,本文所公开的稳定器100的实施例也可以用于其他方法和其他程序,例如经心尖方法,并且不限于置换心脏瓣膜。
通常,稳定器100(例如,系统、稳定器系统、稳定器站)可以是在植入/手术程序期间使用的系统,同时包括某些可移动部件。尽管特定的位置不受限制,但稳定器100可以用于将递送系统保持在适当的位置,例如在患者的腿上方或在手术台上。如下所讨论的,诸如用于递送置换心脏瓣膜的递送系统可以被锁定到稳定器100中,这允许递送系统在程序期间保持稳定。在一些实施例中,稳定器100可以用于以受控的方式使递送系统的部件(独立地或同时)扭转(旋转)、前进和/或缩回。如图1A所示,稳定器100的远端203可以是最靠近递送部位的端部(例如,患者或患者体内的位置),在该递送部位中,稳定器100的近端205与远端203相对地定位。
以前,在整个程序期间,递送系统是由操作者保持在适当的位置的。操作者将手动地移动递送系统或其部件,因此递送系统移动的准确度高度取决于操作者的稳定性和技能。如果操作者意外移动装置,则系统和相关植入物的正确定位可能丢失和/或受损。此外,如果移动是有意的,但过于粗暴,则正确方位也可能丢失和/或受损。因此,所公开的稳定器的实施例可以在递送系统的操作期间提供稳定性。
在一些实施例中,所公开的稳定器100被提供为稳定器系统或稳定器装配件的一部分,诸如图1B和图2所示,该稳定器系统或稳定器装配件还可以包括基座、凳子或其他平坦表面102。在一些实施例中,可以不使用基座102。在一些实施例中,诸如图2所示的基座102可以例如被放置在患者的腿上面,以便帮助支撑稳定器100。基座102的尺寸可以被设定成与稳定器100适当地相互作用。在一些实施例中,基座102可以包括大致平坦的上表面106,该上表面106具有从该表面向下延伸的多个支腿108。因此,患者可以根据需要使他们的腿延伸穿过相邻支腿108之间的间隙。在一些实施例中,可以将2、3、4、5、6、7或8个支腿与基座102一起使用。在一些实施例中,支腿108可以是可调节的,以便改变上表面106的高度。支腿108可以是独立地或同时地可调节的。在一些实施例中,支腿108可以终止于可锁定的轮中,以用于运输基座102。在一些实施例中,支腿108可终止于诸如图2所示的软垫或橡胶端部110,其可提供对基座102的抓握。在一些实施例中,可锁定的轮和橡胶端部110可以是从支腿108可移除和可互换的。在一些实施例中,上表面106可以包括用于与稳定器100相互作用的一个或多个部件。
在一些实施例中,如图3所示,稳定器系统可以进一步包括可以被放置在患者下面的板104或其他硬表面,以为待放置于其上的基底102提供稳定表面112。在一些实施例中,板104可以是非无菌的。在一些实施例中,板104可以是大致平坦的,或者可以具有突起或其他延伸部。在一些实施例中,板104可以包括切口114,该切口可以用作用于移动该板的手柄。此外,板104可以包括用于接收基座102的支腿108的缺口、凹口或孔。板104可以由金属、塑料或陶瓷制成,并且特定的材料不限于本公开。
板104可以搁置在患者腿下方的台或其他表面(例如手术室台)上,并可以为基座102的支腿108的站立提供刚性表面。因此,基座102可以搁置在板104的顶部上,以在支腿上方为稳定器100提供升高的刚性表面。在一些实施例中,板104和基座102可以是非无菌的并且可以位于无菌盖布之下。在一些实施例中,稳定器100可以是无菌的并且被放置在无菌盖布的顶部上。
在一些实施例中,板104和/或基座102可以不与稳定器100一起使用。
如在图1A至图1B中详细示出的,稳定器100可以通过使用一个或多个夹具120附接至上面所讨论的基座或诸如手术台的其他台上。在一些实施例中,上面所讨论的基座102和板104可以不用于稳定器100中,并且稳定器100可以直接附接至台或其他平坦表面。
图4至图5示出附接在稳定器100的远端处(图4)和近端处(图5)的夹具120的实施例。有利地,所公开的夹具120的实施例可以是一件式夹具,尽管也可以使用其他类型的夹具。在一些实施例中,夹具120可以是可消毒的c形夹具。此外,夹具120可以是低廓线的(lowprofile),因此不会干扰患者的腿或手术区域。夹具120可以包括全部或几乎所有的圆形/无创伤的表面,以便不破坏在操作期间已经使用的任何无菌区域。因此,如图4至图5所示,夹具120可以不包括任何锋利的转角。
如图1A至图1B所示,可以使用两个夹具120(尽管也可以使用其他数量的夹具,例如1、2、3、4或5个夹具)将稳定器100附接至基座102(或其他平坦的表面),两个夹具中的一个在近端,一个在远端。在一些实施例中,夹具120可以是相同的。在一些实施例中,夹具120之间可以存在差异。在一些实施例中,夹具120从稳定器100中可移除。在一些实施例中,夹具120可以永久地连接至稳定器100。在一些实施例中,夹具120不具有锋利的边缘,这可以允许它们与放置在基座102上面的无菌盖布兼容,以避免撕裂。夹具120本身可以在稳定器100的大致相对的两侧上间隔开(纵向或横向)。在一些实施例中,夹具120可以物理地附接至稳定器100。在一些实施例中,夹具120可以在稳定器100上可移除或可移动,从而允许它们移动到最佳的夹持方位。
如图4至图5所示,夹具120可以由两个间隔开的支腿(内支腿122和外支腿124)形成,它们通过连接器支腿126连接,从而形成大致C形或U形(尽管也可以使用其他形状)。内支腿122和外支腿124通常可以具有相同的尺寸和形状,尽管它们可以是不同的形状。内支腿122和外支腿124也可以彼此大致平行地延伸。内支腿122可以包括面向外支腿124的第一垫121。第一垫121可以是橡胶或其他柔软的材料(布、塑料等)。外支腿124可以在第二垫125和手柄127之间接受带螺纹的螺钉/螺栓123,以例如通过外支腿124中的孔(带螺纹或无螺纹)来紧固夹具120。因此,稳定器100的一部分可以位于垫121/125之间并被压缩,以便将稳定器100保持在适当位置。然而,也可以使用其他夹具,并且特定的夹具不限于本公开。
如图6所示,为了方便而移除了一些部件,稳定器100可以包括主体202(或细长主体)。主体202的形状可以是大致矩形的,但是不限于特定的形状,并且也可以使用诸如圆形、三角形等的其他形状。主体202可以包括从近端203延伸到远端205的纵向轴线,例如大致沿着主体202的中心。主体202可以包括以下公开的一些或全部特征。
主体202可以包括大致平坦的细长基板207、第一成角度的区段130和第二成角度的区段150。主体202可具有大致平坦的底表面,以便平坦地安置在诸如基座102或其他台面的表面上。主体202可以在底表面上包括凹槽、凸片或其他机械附接部件,诸如以改善摩擦抓握并防止移动。在一些实施例中,主体202的最近端可以包括向下延伸的凸缘(例如,唇缘)204。该凸缘204可以在基座或表面的边缘上面延伸,从而允许基座102的适当定位。在一些实施例中,凸缘204可以是钩形的,用于缠绕在表面的边缘周围。在一些实施例中,凸缘204可以包括一些移动以便锁定到不同尺寸的表面上。此外,夹具120可以附接至凸缘102,诸如图5所示,以便将稳定器100保持在适当的位置。在一些实施例中,主体202还可以在最远端处包括凸缘以完全缠绕在台周围。在一些实施例中,可以在任一端上使用一个以上的凸缘102。在一些实施例中,在稳定器100的任一端上均不使用凸缘。
在一些实施例中,诸如图6所示,主体202可以包括一个或多个切口区段206。这通常可以减轻稳定器100的重量。然而,在一些实施例中,主体202不包括切口。切口206可以是矩形、圆形、三角形或任何形状。在一些实施例中,主体202可以包括两个切口206,一个切口在近端203处,一个切口在远端205处。远端205处的切口206可以延伸到稳定器100的最远端,并且因此切口可能不会被稳定器100完全包围。
如图6所示,主体202可以包括第一成角度的区段(例如,远侧成角度的区段、护套保持器)130和第二成角度的区段(例如,近侧成角度的区段、手柄保持器)150。第一成角度的区段130在第二成角度的区段150的远侧。第一成角度的区段130具有成角度的表面,并且第二成角度的区段150具有成角度的表面。在一些实施例中,远侧成角度的表面(例如,在第一成角度的区段130上)被配置为保持递送系统的护套(例如一体式护套)固定,同时递送系统的手柄可以被保持在第二近侧成角度的表面上(例如,在第二成角度的区段150上),并且可以相对于护套移进和移出(例如,递送系统移动通过保持固定的护套)。保持护套固定防止护套意外移动,例如移入和移出股静脉,减少创伤并可能减少失血。另外,所公开的稳定器100的实施例可以具有低廓线并且成角度以用于患者的最佳接入,例如最佳的股骨接入。
在图7至图8中更详细地示出提供在基座207的远端205处或附近的第一成角度的区段130。成角度的区段130可以朝着远端向下大致成角度。如图所示,成角度的区段130可以包括面向上的成角度的表面132,该面向上的成角度的表面从基板207升高并且可以与平坦的主体202成特定的角度。例如,相对于主体202的角度可以是1°、2°、3°、4°、5°、6°、7°、8°、9°、10°、15°、20°、25°、30°、35°、45°或50°。在一些实施例中,该角度可以在5°至30°之间(或在大约5°至大约30°之间)。在一些实施例中,该角度可以在5°至15°之间(或在大约5°至大约15°之间)。面向上的成角度的表面132可以是平坦的,或大致平坦的。在一些实施例中,面向上的表面132的角度可以是可调节的,例如通过旋钮、螺钉、马达或其他电子控件。在一些实施例中,该角度可以在一个方位中固定。此外,向上成角度的表面132可以围绕竖直轴线旋转以提供进一步的重新定位。在一些实施例中,面向上的表面132可以包括狭槽134,如下文进一步描述的,该狭槽134大致从近侧向远侧延伸(例如,大致平行于稳定器100的纵向轴线)以附接毂套160。
如图7至图8所示,面向上的表面132可以通过一对壁136附接至主体202。在一些实施例中,一对壁136包括孔138,但是在一些实施例中,一对壁136不包括任何孔。也可以使用其他形状和设计,例如圆形表面、大致半球形表面等,并且该形状不是限制性的。
每个壁或一对壁136可以包括向远侧延伸的凸耳/延伸部131,但是在一些实施例中,仅一对壁136中的一个壁可以包括向远侧延伸的凸耳/延伸部131。凸耳131的形状可以是大致矩形的,但是具体的形状不是限制性的。凸耳131可以被配置为与用于将稳定器100附接至台的基座适配器140配合或对接。在一些实施例中,面向上的表面132可以通过近侧后壁附接至主体202,但是一些实施例可以不使用近侧后壁。
尽管在一些实施例中可以被连接,但是图7至图8中所示的基座适配器(例如,坞)140可以是与稳定器100的其余部分分开的工件。单独的基座适配器140允许在稳定器100操作之前将基座适配器140附接/夹持/设置。因此,当准备使用递送系统时,主体202的远端可以快速地插入到基座适配器140中,例如基座适配器140的近端,并且仅需要一个夹具来完成定位。如在下面详细讨论的,一旦基座适配器140附接至表面,基座适配器140就为稳定器100提供了滑入其中的特征件。当稳定器100被固定至基座适配器140中并且所有夹具120都被附接时,基座适配器140防止稳定器100抬起。图7示出连接至主体202的基座适配器140,图8示出分开的基座适配器140和主体202。尽管示出基座适配器140附接在稳定器100的远端处,但是基座适配器140可以替代地位于近端。在一些实施例中,可以使用两个基座适配器,每一端使用一个基座适配器。在一些实施例中,基座适配器140可以连接至稳定器100,但是可以包括诸如棘轮、夹子等可调节特征件以附接至台。
如图7至图8所示,基座适配器140可以在其最远端处包括面向下的凸缘142。如图4所示,面向下的凸缘142可用于将夹具120附接至台。然而,在一些实施例中,可以不使用凸缘。在一些实施例中,凸缘142可以是钩形的,用于缠绕在表面周围。从凸缘142向近侧移动,基座适配器140可以包括大致平坦的基座表面144,然后是对接特征件146。对接特征件146可以包括具有顶表面(或凸耳)141的向上延伸的表面148和从该向上延伸的表面148向近侧延伸的两个凸缘(或凸耳)143。上面讨论的凸耳131可以与凸缘143配合。例如,凸缘143能够向外弯曲以接收凸耳131,并且因此在凸耳131上提供摩擦力。此外,如图7所示,可将凸耳131插入在凸缘143之间,以便在其远端上邻接抵靠向上延伸的表面148,从而使凸耳131与对接特征件对接。因此,顶表面141防止了凸耳131的竖直运动,从而防止了移除。在一些实施例中,螺钉、螺栓、凸耳等可用于将凸耳131可移除地附接至对接特征件146。这是基座适配器140的一个示例,但是也可以使用其他基座适配器。此外,可以不使用基座适配器140,并且稳定器100可以直接附接至表面。
在稳定器100上向近侧移动,图9至图11示出毂套装配件或引导装配件170的实施例。毂套装配件160附接至面向上的表面132。毂套装配件160可以包括大致矩形的毂套适配器162,其可至少部分地搁置在面向上的表面132上。如图10所示,毂套适配器162可以进一步包括面向下的纵向凸耳164,其配置成与面向上的表面132上的狭槽134配合。在一些实施例中,毂套适配器162可以沿狭槽134移动并附接至面向上的表面132,以将递送系统适当地定位在稳定器100内。
通常在毂套适配器162的远端处是毂套166,但是方位不受限制。在一些实施例中,毂套166直接附接至面向上的表面132,并且不使用毂套适配器162。毂套166可以从毂套适配器162向上延伸,并且因此可以相对于稳定器100的主体202成角度。在一些实施例中,可以调节毂套适配器162的方位和角度。毂套166可以包括一对向上延伸的臂168,在一些实施例中,该一对向上延伸的臂168配置成与递送系统的护套毂配合,该护套毂连接至刚性活动(live-on)的(或一体的)护套。这样的护套毂161的示例在图11中示出。护套毂161可以在递送系统的附接之前被附接至毂套166,或者可以在递送系统的附接期间被附接。在一些实施例中,向上延伸的臂168可以与递送系统的另一部件(诸如手柄的远侧部分或递送系统的外护套装配件)可释放地配合。在一些实施例中,向上延伸的臂168可以在多个臂168中的一个或两个臂上包括弹簧柱塞163,以便将护套毂161锁定在适当的位置。此外,弹簧柱塞163可以允许护套毂161相对于毂套166的旋转运动。然而,也可以使用其他附接方法,并且特定的附接不是限制性的。在一些实施例中,毂套166可以包括用于护套毂的配合棘爪。这可以向用户提供触觉反馈。有利地,毂套166可以在外科手术程序中保持护套毂161固定,并防止不必要的移动。这可以最小化对接入部位的伤害。
在图12至图15C中更详细地示出提供在主体202的近端203处或附近的第二成角度的区段150。成角度的区段150可以朝着远端大致向下成角度。如图所示,成角度的区段150可以包括面向上的成角度的表面152,该成角度的表面从基板207升高并且可以与平坦的主体202成特定的角度。例如,角度可以是1°、2°、3°、4°、5°、6°、7°、8°、9°、10°、15°、20°、25°、30°、35°、45°或50°。在一些实施例中,该角度可以在5°至30°之间(或在大约5°至大约30°之间)。在一些实施例中,该角度可以在5°至15°之间(或在大约5°至大约15°之间)。面向上的成角度的表面152可以是平坦的,或大致平坦的。在一些实施例中,面向上的表面152的角度可以是可调节的,例如通过旋钮、螺钉、马达或其他电子控件。在一些实施例中,该角度可以是固定的。此外,向上成角度的表面152可绕竖直轴线旋转以提供进一步的重新定位。
在一些实施例中,面向上的表面152可以包括大致从近侧向远侧延伸的狭槽154。此外,如图所示,面向上的表面152可以通过一对侧壁156附接至主体202。
在一些实施例中,第二成角度的部分150可以与第一成角度的部分130间隔开,尽管可替代地它们可以被连接。在一些实施例中,第一成角度的部分130和第二成角度的部分150纵向对齐。
此外,如图所示,第二成角度的区段150的高度可以小于第一成角度的区段130的高度。然而,在一些实施例中,它们可以具有相同的高度。在一些实施例中,第二成角度的区段150可以具有大于第一成角度的区段130的高度。在一些实施例中,第二成角度的区段150的面向上的表面152可以与第一成角度的区段130的面向上的表面132共平面。在一些实施例中,第二成角度的区段150的面向上的表面152与第一成角度的区段130的面向上的表面132不共平面。在一些实施例中,第二成角度的区段150的面向上的表面152可以与第一成角度的区段130的面向上的表面132平行。在一些实施例中,第二成角度的区段150的面向上的表面152不与第一成角度的区段130的面向上的表面132平行。在一些实施例中,第二成角度的区段150的面向上的表面152与第一成角度的区段130的面向上的表面132平行但不共平面。
如在图12至图15C中示出的,线性夹具装配件170在第二成角度的区段150的顶部上并且与狭槽154配合。狭槽154可以平行于或大致平行于主体202的纵向轴线延伸。如果患者垂直于主体202的纵向轴线对准,则线性夹具装配件170允许内侧/横向调节。如图13所示,线性夹具装配件170可以包括轨道壳体172,在一些实施例中,轨道壳体172可以包括大致形状为矩形棱柱的壳体,但是形状不受限制,其底部上具有纵向延伸的凸耳174以与狭槽154配合。如图14所示,轨道或壳体172可以是中空的,以包含行进螺钉176。在一些实施例中,轨道或壳体172进一步包含用于转动行进螺钉176的手柄或旋钮178。在一些实施例中,可以没有包含行进螺钉176的壳体。在一些实施例中,成角度的区段150可以从基板207解锁。这可以允许成角度的区段150和顶部上的部件相对于基板滑动。这可以允许对手柄托架180进行大的调节,从而允许在碰到硬止挡件时重新调节的能力。
手柄托架180可以与行进螺钉176接合,诸如与位于壳体172内并且围绕行进螺钉176的螺纹孔182接合。因此,当诸如通过旋钮178的旋转来转动行进螺钉176时,手柄托架180将沿着壳体172纵向行进(例如,从近侧向远侧并且从远侧向近侧)。手柄托架180可以行进60mm、70mm、80mm、90mm、100mm、110mm、120mm或130mm。在一些实施例中,手柄托架180可以行进大于60mm、70mm、80mm、90mm、100mm、110mm、120mm或130mm。在一些实施例中,手柄托架180可以行进小于60mm、70mm、80mm、90mm、100mm、110mm、120mm或130mm。可以使用与旋钮178上的棘爪配合的弹簧柱塞来控制沿着行进螺钉176的行进。这可以允许手柄托架180的卡位、受控行进。随着旋钮178转动,每个“咔嗒”声的触觉可为操作员提供触觉反馈,以沿着行进螺钉176适当地推进,并且可便于递送系统的更多的受控运动。
如图15A所示,夹具184(例如软垫或橡胶包覆成型夹具)附接在手柄托架180的顶部处。在一些实施例中,手柄托架180与夹具184的第一半部一体形成。在一些实施例中,手柄托架180与夹具184分开形成。例如如果夹具的第一半部与手柄托架是一体形成的,则夹具186的第一半部可以相对于手柄托架180相对固定。夹具188的第二半部可以例如通过螺钉或螺栓181连接到夹具186的第一半部。因此,旋钮183可用于拧紧或松开两个夹具半部186/188。在一些实施例中,第二夹具半部188可以被保持在第一夹具半部186中的狭槽185内,以防止第二夹具半部旋转。夹具182的尺寸可以被设计成和被配置为保持递送系统的手柄。此外,夹具182可以抵抗施加到递送系统的旋转力(诸如旋钮旋转力)。
图15B示出了图15A的手柄托架180的更多细节。如图所示,第一夹具半部186的内部腔可以包括一直贯穿的内螺纹(female threading)。一旦螺栓181被尽可能深入地拧入螺纹,夹具半部188的顶部就可以以支点运动朝向半部186向内弯曲,以进一步压缩保持在其内的任何递送系统。手柄托架180可以进一步包括销钉189,该销钉189可延伸穿过夹具186并且被压配合到夹具188中。销钉189被压配合到软垫半部中,以防止由于过多的未螺入而释放,因此用作“硬止挡件”以防止半部188被释放。
图15C示出图15B所示的手柄托架180的可替代实施例。如图所示,内螺纹并未一直延伸贯穿半部186,因此具有无螺纹的腔187。这允许螺栓181在该腔187内滑动而不转动,从而允许在打开时更快地释放。此外,手柄托架180可以包括销钉189,该销钉189可延伸穿过夹具186并且被压配合到夹具188中,再次防止意外释放。销钉189可以包括弹簧191。当半部188被拉开时,弹簧191被压缩。一旦释放半部188,类似于弹球机手柄,弹簧191解压缩以快速地将半部188带向半部186。当弹簧191处于中立方位时,夹具184可以对接在递送系统上(例如由虚线圆圈表示),但是没有被完全锁定。
在一些实施例中,螺纹可以用四分之一转快速锁定设计代替。因此,螺栓181可以在一端上包括突起,并且半部186可以包括用于突起的配合特征件。然后可以将螺栓181推动插入并旋转四分之一转,以使突起装配在配合特征件内,从而防止进一步运动。可以通过转动螺栓181来释放螺栓181,以便突起可以从半部186滑出。
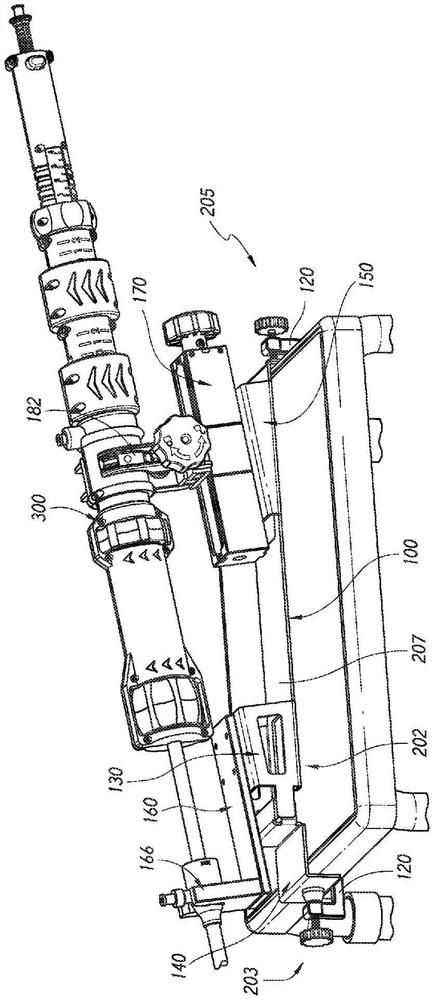
因此,夹具182和毂套166可以大致纵向和/或成角度地对准并且朝着递送系统的远端向下成角度,该递送系统如图16-18所示被附接。因此,递送系统手柄300可以被保持在夹具182和毂套166内。图16示出递送系统的中间方位,而图17示出递送系统的最近侧方位,而图18示出在最远侧方位中的递送系统。
公开一种所公开的稳定器100的实施例的操作方法,该稳定器100用于递送置换心脏瓣膜,特别是置换二尖瓣。这对于经中隔方法可能特别有用,但是稳定器也可以与其他方法(例如经心尖的)和其他心脏瓣膜(例如主动脉)一起使用。此外,稳定器100可以用于其他医疗程序,并且不限于置换心脏瓣膜。
首先,可以将基座适配器140夹持到表面,例如上面讨论的台或基座102。台可以位于患者上方或旁边。在一些实施例中,患者可以大致垂直于稳定器100对准。在一些实施例中,患者可以大致平行于稳定器100对准。在一些实施例中,患者可以以平行于或垂直于稳定器100之间的任何角度对准。
接下来,可以将主体202的远侧部分插入到基座适配器140中,以使主体202与基座适配器140对接。随着基座适配器140已经被夹持,这可以允许主体202被快速地定位于适当的方位中。另外,由于基座适配器140内存在一些空间,因此基座适配器140可允许将稳定器100使用在不同尺寸的表面上。因此,如果表面长,则主体202可以仅少量插入到基座适配器140中。然而,如果表面较短,则可以将主体202尽可能远地插入到基座适配器140中。
随后,主体202的近端可以被夹持到表面。在将主体202插入基座适配器140中之前,可以如下所讨论的将递送系统附接至主体202中。然而,在一些实施例中,在将主体202插入基座适配器140中之后,递送系统被附接。夹具和对接程序可以进一步提供抓握力和稳定性。
为了附接递送系统,递送系统的远端可以滑动穿过护套毂161,使得递送系统从稳定器100向远侧延伸。护套毂161可以在毂套166内旋转,以便于递送系统的插入。在一些实施例中,护套毂161已经在递送系统上,并且然后将护套毂161卡入稳定器100中的适当位置。一旦插入到护套毂161中,就可以将递送系统的手柄放置在夹具184中。可以使用旋钮178将夹具184调整到适当的方位,以便将夹具184恰当地放置在手柄上。这样做可以避免与手柄上的任何致动器发生任何干扰。在一些实施例中,手柄可以包括用于附接夹具184的特定狭槽或区域。然后可以将夹具184拧紧并保持在稳定器100内的适当位置。
使用旋钮178,递送系统的手柄可以精细地被控制并且沿着线性夹具装配件170推进/缩回,以在患者体内恰当地推进(诸如从图17的近侧方位到图18的远侧方位)。当在针对置换二尖瓣的经中隔方法中使用时,使用旋钮178平移递送系统可以相对于天然二尖瓣轴向地(或大致轴向地)推进/缩回递送系统的远端。稳定器100中所使用的较小角度可以使递送系统在程序期间更易于使用。一旦操作完成,就可以从稳定器100上移除递送系统。
在一些实施例中,上面所描述的稳定器100可以利用通用稳定器系统1000(如图19所示)。可替代地,上面所描述的稳定器100的仅某些部件(例如引导装配件170)可以与通用稳定器一起使用。该系统可容易地适用于不同尺寸的基座和递送系统。
与上述类似,基座102和板104可以与稳定器1000一起使用。然而,稳定器100可以利用通用可附接导轨1010(代替夹具120和基板107),这可以允许更大的灵活性和适应性。然而,在一些实施例中,这些部件可以在通用稳定器系统1000中使用。在一些实施例中,基板207可以直接附接至导轨1010。在一些实施例中,仅引导装配件170可以附接至导轨1010。在一些实施例中,引导装配件170和毂套160可以附接至导轨1010。
图19示出稳定器1000的实施例。如图所示,稳定器1000可以包括导轨1010,该导轨可以包括在纵向上间隔开的可移动夹具1012和固定夹具1014。在一些实施例中,两个夹具都可以是可移动的。如下面详细讨论的,可移动夹具1012可以沿着导轨滑动并且被锁定在导轨上的期望方位处,从而允许导轨1010被附接至不同尺寸的表面。
稳定器1000可以进一步包括导轨坞1016,其可以用于将递送系统保持器附接至导轨1010。在一些实施例中,导轨坞1016可以与递送系统保持器一体形成。例如,引导装配件170可以附接至导轨坞1016的上表面。递送系统保持器上的不同夹具可以用于不同的装置,并且可以根据需要换成不同的递送系统保持器并将其附接到导轨坞1016。在一些实施例中,可以沿着导轨1010使用多个导轨坞1016,例如将引导装配件170保持在近侧方位中并且将毂套160保持在远侧方位处。导轨坞1016可以包括与上面关于130和150所讨论的相似的成角度的表面。在一些实施例中,导轨坞1016可以具有用于调节角度的可调节的上表面。
如图20A至图20F所示,导轨坞1016可以具有带有突起1009的底表面,该突起1009至少部分地缠绕在导轨1010的顶表面周围,从而允许导轨坞1016沿着导轨1010滑动,同时防止移除。导轨坞1016可以进一步包括锁(诸如快速四分之一锁),以用于附接至导轨1010和从导轨1010上拆卸,并且用于维持导轨坞1016在导轨上的方位。如图所示,该锁可以包括手柄1017,该手柄1017可旋转地连接到导轨坞1016的一侧并且例如通过一个弹簧或一对弹簧1031以及螺栓或其他附接构件1033附接至在导轨坞1016的相对侧上的板1015。在一些实施例中,手柄1017可以装配在导轨坞1016的侧面上的切口内。可替代地,在一些实施例中,可以使用按钮、旋钮或其他致动器。手柄1017可以在锁定方位(图20C)和解锁方位(图20D)之间旋转。通过将手柄1017旋转到锁定方位,板1015在导轨坞1016的相对侧上被压缩到导轨1010上,例如通过压缩弹簧(如图20E中所示),这将板1015的脚1007锁定。这防止了导轨坞1016的运动,并且进一步防止了导轨坞1016从导轨1010移除。在解锁方位中,按照标准的皮卡汀尼设计,导轨坞1016可以滑出导轨1010的纵向端,或者可以朝着手柄1017旋转以将其移除。在一些实施例中,处于锁定方位或解锁方位中的导轨坞1016可以不从导轨1010上直接抬起。在一些实施例中,尽管材料的类型不是限制性的,但导轨坞1016可以包括Delrin基座和PEEK手柄1017/板1016。在一些实施例中,导轨坞1016可以固定在导轨1010上,因此可以不使用锁定系统。
图19示出附接在导轨坞1016的上表面上的引导装配件170。如图20A至图20F所示,在类似于第二成角度的区段150的配置中,导轨坞1016可以在上表面上包括凹槽/狭槽1019,以便附接至引导装配件170的底表面上的突起。可以使用其他附件(例如螺钉、螺栓或磁铁)以将引导装配件170更牢固地附接至导轨坞1016。但是,可以修改导轨坞1016的上表面,并且在一些实施例中可以不包括狭槽,可以包括任意数量(1、2、3、4、5、6)的螺钉/螺栓孔或用于附接到不同的夹具的其他调整装置。
有利地,基座102和板104可以是可重复使用的并且是非无菌的,尽管仍保留在无菌区内。导轨1010和固定夹具1014两者都可以是可重复使用的和无菌的。在一些实施例中,可移动夹具1012和导轨坞1016也可以是可重复使用的和无菌的。在可替代实施例中,可移动夹具1012和导轨坞1016中的一者或两者可以是一次性的,并且在导轨1010上是可更换的。这可以允许修改导轨1010以适应不同的递送装置和附件。
图21A至图21C示出导轨1010的实施例,该导轨可以由诸如不锈钢的金属形成,但是具体材料不受限制。在一些实施例中,导轨1010由可以被设计用于重复使用的清洁/高压灭菌的材料形成。如图21B所示,该图沿纵线观察导轨1010,导轨1010可以包括成对的侧向突起1111,其在正交于纵向轴线的每一侧上远离导轨向外延伸,从而在导轨1010的每一侧上在侧向突起1111之间形成腔1013。突起1111可以是矩形或三角形的,并且具体形状不受限制。在一些实施例中,上突起1111可以是三角形的,而下突起1111可以是矩形的。在一些实施例中,相对侧上的突起1111可以具有不同的形状或者可以是相同的。在同一侧上的突起1111可以具有不同的形状或可以是相同的。因此,例如,导轨坞1016或可移动夹具1012的向内延伸的臂可以被保持在腔1013内,以防止从导轨1010释放。突起1111可以完全沿着导轨1010的长度延伸。在其他实施例中,突起1111可以沿着导轨1010的长度延伸至少90%、95%或99%。
图22A至图22B示出导轨1010的横截面的可替代示例实施例。但是,这些横截面并非旨在限制形状,并且可以使用任何类型的横截面(诸如矩形横截面)。导轨1010’/1010”可以包括刻痕1022和延伸部1024(其可以起到突起1111和腔1013的作用)。
图23示出导轨1010和固定夹具1014的透视图。如图所示,固定夹具1014可以与导轨1010集成在一起,但是在其他实施例中,固定夹具可以是可用的。固定夹具1014可以是成角度的,并且可以是钩、夹具或其他附接机构。如图24A至图24C所示,固定夹具1014可以是柔性的,以允许附接至表面1030的不同厚度。如图21C所示,可以将固定夹具1014插入导轨1010的底表面中的狭槽中。固定夹具1014可以与导轨1010一体形成,机械地或化学地粘附。
图21C示出可移动夹具1012的实施例的视图。如所讨论的,可移动夹具1012可以是一次性的或可重复使用的。夹具1012可以大致附接在导轨1012的一个纵向端。可移动夹具1012可以由旋钮1021、附接板1023和夹具1025形成。可以将附接板1023插入导轨1010的底表面中的狭槽中。附接板1023可以与导轨1010一体形成,机械地或化学地粘附。附接板可以保持从旋钮1021延伸的螺钉/螺栓1029,例如穿过附接板1023中的孔。与旋钮1021相对的螺钉/螺栓1029的端部可以与夹具1012配合。夹具1012可以在上表面上包括突起1027(在图21B中可见)以装配在导轨1010的侧面的每一侧上的腔1013内,从而允许夹具1012在保持附接的同时沿着导轨1010滑动。当旋钮1021被转动时,夹具1012可以沿着导轨1010纵向移动。这允许夹具1012压缩到不同尺寸的表面上,从而允许系统1000的通用性。
图25示出作为夹具1012’的可移动夹具1012的可替代实施例,并且因此可以结合以上关于可移动夹具1012讨论的一些或全部特征。如所讨论的,可移动夹具1012’可以是一次性的或可重复使用的。如图所示,夹具1012’通常可以包括主体1040、释放件1042和夹具1044。主体1040可以与导轨1010相互作用(例如,附接至导轨、与导轨耦合)。主体1040可以沿着导轨1010滑动,例如在腔1013内。此外,主体1040可以包括防止主体1040向后运动从而防止意外释放的机构。主体1040可以进一步包含释放致动器(旋钮、按钮、开关等),该释放致动器可被致动以释放单向机构,从而允许主体1040从固定夹具1014移开。此外,可移动夹具1012’可以包括如上关于固定夹具1014所讨论的夹具机构1044。夹具机构1044可以与固定夹具1014相同或不同。
如图26A至图26B所示,可移动夹具1012可以被移动以便容易且快速地夹持在表面1030上。在一些实施例中,可移动夹具1012可以沿着导轨1010的外表面滑动。在一些实施例中,导轨1010可以包含内腔,并且可移动夹具1012可以包含在内腔内滑动的部分。在一些实施例中,可移动夹具1012可以包括具有释放件的单向滑动机构,以允许可移动夹具1012的移动和锁定。
图27示出移除了夹具1012/1014/1016的导轨1010的实施例。如图所示,导轨1010可以包括翼或脚1018。这些翼1018可以与导轨1010集成在一起,或者是可移除和可附接的。翼1018可以提供附加的支撑和稳定性,以防止导轨1010的任何摇摆。因此,当系统在使用中时,翼1018可以接触导轨1010所在的表面。如图所示,翼1018可以位于固定夹具1014附近,但是翼1018的方位不受限制。
图28示出在基座102上的以上公开的系统1000的实施例。
在一些实施例中,稳定器100(或稳定器1000)可以被电子控制。因此,一旦安装了递送系统并且稳定器100/1000被附接至表面以便移动递送系统,则用户不需要直接与稳定器100/1000相互作用。例如,稳定器100/1000上的任何旋钮(127、178、183、1021)或其他致动器都可以诸如通过计算机、电话应用程序、控制器(无线或直接连接)或其他操作被电子控制。在一些实施例中,导轨坞1016的方位也可以被电子控制。因此,在一些实施例中,稳定器100/1000可以包括马达,以操纵稳定器100/1000上的致动器。此外,稳定器100/1000可以包括马达/传感器/控件,以远程操作递送系统。这可以为半机器人程序提供选项,其中稳定器的主要功能更近似于致动工具。由于稳定器能够致动旋钮,因此医师可以经由远程位置植入瓣膜。可替代地,如果医师位于具有稳定器100/1000的位置,则电子控件可以辅助医师和/或允许医师花费更多的时间来观察可视化。
作为示例,控制器可以操作旋钮178,以便使手柄托架180沿着稳定器100/1000中的螺钉176移动,从而提供递送系统的远侧和近侧运动。控制器可以包括锁定特征件,以防止意外运动。
在一些实施例中,来自可视化(X射线、荧光检查等)的反馈可用于改善递送并减少血管损伤的机会。例如,稳定器100/1000可以自动停止任何移动,以避免接触/损坏患者的解剖结构。在一些实施例中,可以包括传感器和/或可视化以测量和提供反馈(诸如递送系统的偏转角)。传感器可以被结合到递送系统中,并且可以与稳定器100/1000例如无线地通信。传感器可用于检测参数,包括但不限于力、压力、方位、偏转或旋转。电子控制系统也可以利用人工智能(诸如使用机器学习)来增强程序。来自先前程序的数据,特别是来自具有相似解剖结构的患者的数据,可以用于帮助指导导管的推进和人工瓣膜的部署。在高级实施例中,可以通过利用来自先前执行的程序的大量数据和经验,以接近完美的精度自主地执行整个程序。
图29和图30示出电动控件的实施例。这些控件可以利用任何上述电子/电动控件,并且可以被并入任何公开的稳定器和递送系统中。可替代地,这些控件可以单独使用。
图29示出旋钮控制系统1050的实施例。系统1050可以被设计成装配在递送系统(诸如递送系统300)的手柄的一部分或全部周围。图29示出由可以形成保持器/容器的上半部1052和下半部1054形成的翻盖设计。手柄可以装配在下半部1054中的腔1058内,并且任何轴都可以延伸出系统150中的孔160。上半部1052可以包含辊1056(诸如压缩辊),一旦系统1050围绕手柄闭合,辊可将摩擦施加到递送系统上的任何旋钮。下半部1054还可以包含辊1056,与上半部1052一起或者代替具有辊1056的上半部1052。尽管翻盖是示例设计,但是可以使用可以部分或完全包含递送系统手柄的其他设计。此外,也可以代替辊或与辊一起使用用于致动递送系统上的旋钮的其他机构。
系统1050可以沿着系统1050的长度包括各种不同的区段A-E。区段的数量不受限制,并且可以包括1、2、3、4、5、6、7、8、9或10个区段。这些区段可以彼此物理隔离,例如通过屏障或壁,或者可以只是具有不同部件的单独连接区域。所有或一些区段可以包括可旋转部件(诸如辊1056)或者可以自身旋转。可旋转区段的数量可以与递送系统上的可旋转旋钮的数量相同。例如,1、2、3、4、5、6、7、8、9或10个区段可以包括可旋转部件。通过在可旋转区段中旋转辊1056,这些辊被摩擦地压靠在手柄上的旋钮上,辊将在递送系统上旋转它们各自的旋钮/致动器。因此,通过在不同区段中单独地旋转辊1056,可以在手柄上致动不同的旋钮。不同区段中的辊1056可以在手柄上施加不同的力。一些区段可以不包括可旋转部件,并且能够更紧密地配合以在其他区段正旋转时将手柄保持在适当的位置,从而允许致动旋钮。可旋转区段可以单独旋转或可以根据用户的需要一起旋转。
系统1050可以附接至马达(或者可以在系统1050之内或之外包含马达),以便在不同的可旋转区段中旋转部件。在一些实施例中,马达可以是编码器,其可以跟踪每个区段的转数和位置。如上面所讨论的,马达可以有线或无线方式操作。
图30示出用于操纵递送系统的手柄的电动控制系统1070的实施例。与系统1050不同,系统1070用于将手柄作为整体单元移动。在一些实施例中,可以不使用系统1070,并且系统1050可以被配置为完全旋转手柄以及不同的旋钮。系统1070可以包括可旋转的带子/条带/保持器1072,其可以缠绕在递送系统的手柄周围或可以缠绕在系统1050的固定区段周围。带子1072可以摩擦地保持手柄或系统1050,或者可以被机械地或化学地粘附。带子1072可以被旋转以完全旋转递送系统。此外,系统1070可以包括支架/基座1074。基座1074可以位于轨道1076或其他可平移部件上。基座1074可以沿着轨道1076平移,以向递送系统提供轴向/纵向运动。轨道1076和带子1072两者都可以由诸如本文所讨论的马达操作。相同的马达可用于操作系统1070和系统1050。在一些实施例中,使用不同的马达。
因此,如果同时使用系统1070和系统1050两者,则用户可以单独地操纵不同的旋钮以及旋转地或轴向地平移递送系统。本文所讨论的不同可移动部件都可以电子地操作。
如上所述,稳定器100/1000利用无创伤的夹具(120、1012、1014)将稳定器100/1000附接至基座102。基座102通常在无菌盖布下,并且稳定器100/1000在盖布的顶部,因此两者之间的连接使得无菌区得以维持。优选地,该连接是稳固的,但是也是快速的,以便不延迟该程序,同时还防止损伤无菌盖布。另外,如果需要移动稳定器100/1000并且手动操作递送系统手柄300,则对于能够快速移除连接是有用的。尽管上面讨论的夹具可以实现所有这些优点,但是可以代替夹具或与夹具结合使用其他附接/连接。因此,磁性附接可以代替任何和所有以上公开的夹具。在一些实施例中,可以使用磁性附接来移除基座适配器140。此外,可以从基板207上移除凸缘204,使得稳定器100/1000具有平坦的底表面。对于稳定器1000,可以移除夹具1012和夹具1014。
在一些实施例中,可以使用磁体(例如,磁夹持机构、磁性夹具等)以将稳定器100/1000附接至基座102。磁性夹具可以被容易地移除,并且是将稳定器100/1000附接至基座102的快速、可靠的方法。在一些实施例中,在递送系统已经跨入天然二尖瓣中之后,将稳定器100/1000放置到位,因此连接速度可以是有用的特征。通过使用磁性系统,可以快速附接稳定器100/1000,并将其固定直到程序结束。
在一些实施例中,基座102可以由磁性材料制成,其中可以至少部分地为金属的稳定器100/1000可以容易地粘附到该磁性材料。例如,基座102的上表面106可以由磁性材料形成。在一些实施例中,整个上表面106可以由磁性材料形成。在一些实施例中,上表面106可以包括磁性材料的条带。该条带的尺寸可以等于、大于或小于稳定器100/1000的占地面积的尺寸。在一些实施例中,磁性材料可以被附接至上表面106的上表面,然后可以被无菌盖布覆盖。由于基座102位于盖布下面,远离磁性敏感设备,因此其可以是放置磁性特征件的有利的区域。
在一些实施例中,磁体可以附接至稳定器100/1000的底表面,例如附接至基板207或导轨1010的底表面上。在一些实施例中,基板207或导轨1010的一部分或全部可以由磁性材料制成。然后,基座102可以由金属或磁性吸引到磁体的其他材料制成。
在一些实施例中,以上公开的磁性特征件可以是电磁体或偶极系统。因此,用户可以例如通过按钮、开关、控制器、计算机、应用程序等打开或关闭磁场。因此,磁性连接可以变得更稳固,并且当该程序完成时,操作者可以关闭磁场并轻松移除稳定器100/1000。
从前面的描述中,将认识到,公开了具有创造性的稳定器。尽管已经以一定程度的特殊性描述了若干部件、技术和方面,但显而易见的是,可以在不脱离本公开的精神和范围的情况下,在上文描述的上述特定设计、构造和方法中进行许多改变。
在单独的实施方式的上下文中在本公开中所描述的某些特征也可以在单个实施方式中组合实现。相反,在单个实施方式的上下文中所描述的各种特征也可以分别在多个实施方式中或以任何合适的子组合实现。而且,尽管以上将特征描述为以某些组合运作,但是在某些情况下,可以从该组合中切除所要求保护的组合的一个或多个特征,并且可以要求保护该组合为任何子组合或任何子组合的变体。
此外,尽管可以以特定顺序在附图中描绘或在说明书中描述方法,但是不需要以所示的特定顺序或以顺序的顺序执行这样的方法,并且不需要执行所有方法来获得期望的结果。未描绘或描述的其他方法可以并入示例方法和过程中。例如,可以在任何所描述的方法之前、之后、同时或之间执行一种或多种其他方法。此外,可以在其他实施方式中重新排列或重新排序方法。另外,上述实施方式中的各种系统部件的分离不应理解为在所有实施方式中都需要这样的分离,并且应当理解,所描述的部件和系统通常可以集成在单个产品中或包装成多个产品。另外,其他实施方式也在本公开的范围内。
除非另有明确说明或在所使用的上下文中以其他方式理解,否则条件性语言(例如“可以”、“可能”、“可”或“能够”)通常旨在传达某些实现方式包括或不包括某些功能、元件和/或步骤。因此,这样的条件性语言通常不旨在暗示特征、元件和/或步骤以任何方式对于一个或多个实施例都是必需的。
除非另有明确说明,否则诸如短语“X、Y和Z中的至少一个”的连接语言可以在上下文中理解为通常用来传达项目、术语等,可以是X、Y或Z。因此,这种连接语言通常不旨在暗示某些实施例要求存在X中的至少一个、Y中的至少一个和Z中的至少一个。
本文所使用的程度语言,诸如本文所用的术语“约”、“大约”、“大致”和“基本上”表示接近于仍然执行期望的功能或达到期望的结果的规定值、量或特性的值、量或特性。例如,术语“约”、“大约”、“大致”和“基本上”可以指的是小于或等于规定量的10%内的量、小于或等于规定量的5%内的量、小于或等于规定量的1%内的量、小于或等于规定量的0.1%内的量以及小于或等于规定量的0.01%内的量。如果规定量为0(例如,无、没有),则上述范围可以是特定范围,并且不在该值的特定百分比内。例如,在小于或等于规定量的10wt./vol.%(重量/体积%)内、在小于或等于规定量的5wt./vol.%内、在小于或等于规定量的1wt./vol.%内、在小于或等于规定量的0.1wt./vol.%内以及在小于或等于规定量的0.01wt./vol.%内。
已经结合附图描述了一些实施例。附图是按比例绘制的,但是这种比例不应该是限制性的,因为除了所示出的尺寸和比例之外,其他尺寸和比例都是可以预期的,并且在所公开的发明的范围之内。距离、角度等仅是示例性的,不一定与所示设备的实际尺寸和布局具有确切的关系。可以添加、删除和/或重新排列部件。此外,结合各种实施例的任何特定特征、方面、方法、性能、特性、质量、属性、元件等的本文公开内容可以用于本文阐述的所有其他实施例中。另外,将认识到,可以使用适合于执行所列举的步骤的任何装置来实践本文描述的任何方法。
尽管已经详细描述了多个实施例及其变型,但是对于本领域技术人员而言,其他修改和使用实施例及其变型的方法将是显而易见的。因此,应当理解,在不脱离本文的独特和发明性公开或权利要求的范围的情况下,可以对等同物进行各种应用、修改、材料和替代。
- 递送系统的稳定器
- 遗失物品递送辅助装置、遗失物品递送辅助系统、遗失物品递送辅助方法以及存储介质