生物体信息测量器
文献发布时间:2023-06-19 11:57:35
技术领域
本发明涉及一种生物体信息测量器。
背景技术
作为无创伤地监测受检者的生物体信息的一种方法,存在光电容积脉搏波测量法(Photoplethysmography;PPG(以下称为“PPG”。))。PPG是通过对受检者的生物体表面照射预定波长的光并对透过该表面的光量的时间序列变化进行测量来监测血流变化的方法。对于血流,由于其受到多个生物体系统的影响,因此通过采用PPG,能够对脉搏数(HB)、心率变动(HRV)、血管伸缩性(RI)、动脉血氧饱和度(SpO2)、局部组织氧饱和度(rSO2)这样的各种生物体指标进行测量。存在将用于PPG测量的探针安装于手指、耳垂、手臂(手腕)的例子。
例如,下述专利文献1公开了如下一种装置,其用于对受检者的PPG等的生理学参数进行测量,该装置具备:固定器具,其用于将该装置固定于受检者的手臂;传感器,其用于对受检者的生理学参数进行测量;处理器,其用于对基于从所述传感器接收到的信号的测量值进行转换而形成医疗信息;以及通信装置,其用于从所述处理器接收所述医疗信息并发送所述医疗信息。
另一方面,下述专利文献2公开了如下一种生物体电位测量电极,该生物体电位测量电极具备:粘合片,其具有固定于该生物体的粘合面,在该粘合片的大致中央穿设有透孔;电极部,其通过弹性体的按压而经由该粘合片的透孔紧贴于生物体;保持部,其保持该电极部;以及卡合部,其将该保持部和该粘合片可拆装地卡合起来。
另外,下述专利文献3公开了如下一种包含处理器的系统,该处理器使用由第1传感器测量的与动脉血氧浓度相关联的第1生理学参数和由第2传感器测量的与呼吸相关联的第2生理学参数,来测量与动脉血氧浓度相关联的波形,校正与组织部位的动作相关联的伪影(日文:アーチファクト)。
现有技术文献
专利文献
专利文献1:日本特开2005-511223号公报
专利文献2:日本特开平3-228737号公报
专利文献3:美国专利申请公开第2018/0235526号说明书
发明内容
对于上述专利文献1所公开的装置,由于将用于测量PPG的传感器安装于受检者的手指、耳垂、手臂,因此,要求传感器自身的小型化,不适合于检测微弱的生物体信号。另外,在上述以往的装置中,构成为,要将PPG传感器安装于受检者的手臂等,另一方面,在心电图的测量时,要将电极传感器安装于生物体的皮肤表面(以下称为“生物体表面”。),因此,各种传感器的安装烦杂。
另外,对于PPG传感器,为了提高测量精度,其需要相对于皮肤一边以一定程度的力进行按压一边安装,为了安装于手臂等,使用了绷带或束带。因而,以往没有提出将PPG传感器安装于生物体表面这样的方案,即使存在那样的安装于生物体表面的PPG传感器,也会在使用绷带等时存在其安装烦杂这样的问题。
另外,上述专利文献2所公开的技术是将配置于粘合片的大致中央的电极按压于生物体的技术,原本就不是有效地测量PPG的技术。
另外,在上述专利文献3所公开的技术中,虽然第1传感器被按压于组织部位而测量动脉血氧浓度,但由于与粘合性构件的粘合力之间的关系,无法高效地按压第1传感器。
因此,本发明的目的在于提供一种能够将传感器以适度的按压力简单地安装于生物体表面且不易脱落的机构。
具体而言,本发明的一个目的在于提供一种具有能够将PPG传感器以适度的按压力简单且可靠地安装于生物体表面的机构的生物体信息测量器。
另外,本发明的一个目的在于提供一种能够充分确保PPG传感器与生物体表面接触的接触面积的生物体信息测量器。
另外,本发明的一个目的在于提供一种具有能够将粘合性构件对于生物体表面的粘合力有效地用于PPG传感器的按压力的机构的生物体信息测量器。
用于解决上述课题的本发明构成为包含以下所示的发明特定事项或技术特征。
即,基于某一观点的本发明提供一种生物体信息测量器,该生物体信息测量器具备:基体;第1传感器部,该第1传感器部以能够相对于所述基体位移的方式设置,且包含多个用于对受检者的生物体信息进行测量的传感器;按压部,其用于相对于所述受检者的生物体表面弹性地按压所述第1传感器部;以及多个贴合部,其设于所述基体,能贴合于所述生物体表面。并且,所述按压部能够构成为,对抗通过所述多个贴合部的贴合力贴合于所述生物体表面的所述基体地按压所述第1传感器部的所述多个传感器。由此,能够将多个传感器以适度的按压力简单地安装于生物体表面。另外,受检者的生物体表面(皮肤)下的组织根据位置而不同,因此,生物体信息的收集存在难度,但通过设置多个传感器,能够更可靠地收集生物体信息,能够提高测量精度。
所述按压部能够具备:揿动部,其根据按压操作而相应地位移;以及第1弹性体,其对所述揿动部进行弹性施力。另外,所述第1传感器部以与所述揿动部的动作连动的方式设置。并且,根据对所述揿动部的第1按压操作,所述揿动部前进而使处于避让位置的所述第1传感器部前进,所述第1传感器部被定位为从所述基体的底面部突出,根据对所述揿动部的第2按压操作,所述揿动部后退,从所述基体的底面部突出的所述第1传感器部移动至所述避让位置。
更具体而言,所述按压部能够具备:凸轮主体,其具有凸轮槽和齿接收部;揿动部,其具有被设成能够沿着所述凸轮槽滑动的凸轮齿;以及第1弹性体,其对所述揿动部进行弹性施力。另外,所述第1传感器部以与所述揿动部的动作连动的方式设置。并且,根据对所述揿动部的第1按压操作,所述凸轮齿前进而卡合于所述齿接收部,由此使处于避让位置的所述第1传感器部前进而从所述基体的底面部突出。另外,根据对所述揿动部的第2按压操作,所述凸轮齿脱离所述齿接收部并沿着所述凸轮齿后退,由此从所述基体的底面部突出的所述第1传感器部移动至所述避让位置。
另外,所述按压部还能够包含对所述第1传感器部进行弹性施力的第2弹性体。
并且,所述按压部能够具备调整部,该调整部对所述传感器部相对于所述基体的底面突出的量进行调整。
另外,所述第1传感器部能够包含用于对PPG进行光学测量的1个或多个传感器。所述多个传感器中的各传感器能够由1个或多个发光元件和1个或多个光接收元件的组合来构成。
另外,也可以是,所述贴合部具备第2传感器部,或者所述贴合部整体是第2传感器部。或者,也可以是,所述第2传感器部相对于所述贴合部独立地构成。所述第2传感器部能够包含用于对生物体电信号进行测量的电极垫。
另外,所述按压部能够包含对所述第1传感器部进行弹性施力的多个弹性体。并且,所述多个弹性体能够分别设于所述第1传感器部的与设有所述多个传感器的第1面相反的那侧的第2面。
另外,在所述基体,能够设有分别支承所述多个贴合部的多个支承部。所述多个支承部能够由挠性构件构成。
在此,所述多个贴合部的重心位置在包含所述生物体表面的假想面中能够被包含于所述第1传感器部。或者,所述多个贴合部的重心位置能够与所述多个传感器的重心位置大致一致。另外,所述第1传感器部的重心位置能够与所述多个弹性体的重心位置大致一致。
另外,所述第1传感器部能够包含搭载有所述多个传感器的基板。所述基板的全部或一部分可以为刚性基板,也可以是柔性基板。另外,所述基板形成为弯曲部,所述弯曲部能够构成为,追随所述生物体表面的形状而抵接于所述生物体表面。
根据本发明,能够将传感器以适度的按压力简单地安装于生物体表面,不容易脱落,能够可靠地测量生物体信息。
另外,根据本发明,由于能够将传感器以适度的按压力简单地安装于生物体表面,因此能够充分地确保与生物体表面之间的接触面积,能够防止生物体表面的不期望的反射光的散射和/或能够随着动脉血的适度的压迫而增强生物体信号,由此能够更可靠地测量生物体信息。
另外,根据本发明,通过将贴合面积比较小的贴合部有效地贴合于生物体表面的起伏或凹凸,能够可靠地安装生物体信息测量器。
并且,根据本发明,由于贴合部的粘合面的重心位于搭载有传感器的基板(第1传感器部)内,因此,能够对抗贴合部的粘合力地通过弹性体的按压力使基板可靠地按压生物体表面,能够一边以适度的按压力接触于生物体表面,一边更可靠地测量生物体信息。
本发明的其他的技术特征、目的、以及作用效果乃至优点会通过参照附图来说明的以下的实施方式而变得明确。
附图说明
图1是表示本发明的一个实施方式的生物体信息测量器的一个例子的外观上方立体图。
图2是表示本发明的一个实施方式的生物体信息测量器的一个例子的仰视图。
图3是用于说明本发明的一个实施方式的生物体信息测量器的可凹进的按压机构的图,是表示第1传感器部处于避让位置的状态的图。
图4是用于说明本发明的一个实施方式的生物体信息测量器的可凹进的按压机构的图,是表示第1传感器部处于突出位置的状态的图。
图5是表示本发明的一个实施方式的生物体信息测量器的一个例子的外观上方立体图。
图6是表示本发明的一个实施方式的生物体信息测量器的一个例子的外观下方立体图。
图7是表示本发明的一个实施方式的生物体信息测量器的结构的一个例子的侧剖视图。
图8是用于说明本发明的一个实施方式的生物体信息测量器的一个例子的图。
图9是表示本发明的一个实施方式的生物体信息测量器的结构的一个例子的俯视图。
图10是图9所示的生物体信息测量器的基体部分的侧视图。
图11是表示本发明的一实施方式的生物体信息测量器的外观结构的一个例子的下方立体图。
图12是表示图11所示的生物体信息测量器的外观结构的一个例子的侧视图。
图13是用于说明本发明的一实施方式的生物体信息测量器的底面部的结构的一个例子的图。
图14是用于说明本发明的一实施方式的生物体信息测量器的底面部的结构的一个例子的图。
图15是表示本发明的一实施方式的生物体信息测量器的外观结构的一个例子的侧视图。
图16是图15所示的生物体信息测量器的仰视图。
图17是用于说明本发明的一实施方式的生物体信息测量器的第1传感器部与贴合部之间的位置关系的一个例子的图。
图18是用于说明本发明的一实施方式的生物体信息测量器的第1传感器部与贴合部之间的位置关系的一个例子的图。
图19是用于说明本发明的一实施方式的生物体信息测量器中的第1传感器部与贴合部之间的位置关系的一个例子的图。
图20是用于说明本发明的一实施方式的生物体信息测量器中的第1传感器部与贴合部之间的位置关系的一个例子的图。
具体实施方式
以下,参照附图来说明本发明的实施方式。但是,以下说明的实施方式只是例示,并不意图排除以下未明示的各种变形、技术的应用。本发明能够在不脱离其主旨的范围内进行各种变形(例如将各实施方式组合等)来实施。另外,在以下的附图的记载中,对于相同或类似的部分标注相同或类似的附图标记来表示。附图是示意性的,不一定与实际的尺寸、比例等一致。在附图彼此之间,有时包含彼此的尺寸关系、比例不同的部分。
[第1实施方式]
在本实施方式中,说明如下的生物体信息测量器的例子,该生物体信息测量器构成为,具备能贴合于受检者的生物体表面的多个贴合部,按压机构或按压部对抗通过该多个贴合部的贴合力贴合于该生物体表面的基体地按压1个或多个PPG传感器。另外,作为按压机构的一个例子,示出揿动机构。
图1是表示本发明的一个实施方式的生物体信息测量器的一个例子的外观上方立体图。如该图所示,生物体信息测量器1的大致外观例如由扁平的壳体或基体10形成,扁平的壳体或基体10的靠天顶部侧的相面对的至少1组棱线部被弄圆(形成有棱线圆弧)。换言之,本例的生物体信息测量器1具有在俯视时为大致矩形且在主视时天顶部为平坦的大致半圆筒形状(倒U形状)。但是,基体10的形状并不限于本例,既可以是单纯的扁平的长方体形状等,也可以是扁平的三角形形状、圆盘状或椭圆盘状等。在基体10内部,例如能够含有控制电路、通信模块电路等。
在生物体信息测量器1的天顶部的大致中央部形成有揿动部20,该揿动部20具有用于供使用者(医疗从业人员、受检者、其辅助者等)例如利用其手指肚按下的头部。生物体信息测量器1形成为能够安装于受检者的生物体表面的尺寸,作为其一个例子,基体10的宽度约为80mm,进深约为50mm,高度约为18mm,揿动部20从天顶部突出的突出量约为5mm。作为受检者的生物体表面部位的一个例子,可列举出额头、脊背、胸部、腹部、大腿部、手臂、颈部和手的表面等。如后述那样,构成为,使用者通过对揿动部20进行按下(按压)操作来使设于基体10的底面部的第1传感器部30比底面部稍微突出(参照图4)。
图2是表示本发明的一个实施方式的生物体信息测量器的一个例子的仰视图。如该图所示,在生物体信息测量器1的底面部设有第1传感器部30和贴合部40,该第1传感器部30构成为能够相对于基体10弹性地位移,该贴合部40设于基体10。在本发明中,能够位移的意思是至少包含该物体能够在两个位置之间移动的情况。贴合部40能够构成为包含第2传感器部50,但在某例子中,贴合部40能够整体为第2传感器部50。另外,在其他的例子中,贴合部40和第2传感器部50能够相对独立地构成。第1传感器部30例如配置于基体10的底面部的大致中央,贴合部40(或第2传感器部50)以夹着第1传感器部30的方式配置于该第1传感器部30的两侧。或者,贴合部40(或第2传感器部50)能够以包围第1传感器部30的周围的方式对称或非对称地、和/或连续或离散地配置。
第1传感器部30例如构成为包含基板,并包含设于该基板上的、对生物体信息进行测量的1个或多个传感器。基板的例如全部或一部分可以为刚性基板,或者也可以为柔性基板。1个或多个传感器例如构成为包含用于对生物体的PPG进行测量的PPG传感器,但并不限于此。在典型的情况下,PPG传感器是构成为包含分别照射出具有不同波长的两种光(例如红色光和红外光)的发光元件和接收该发光元件的反射光的光接收元件的传感器器件。第1传感器部30能够包含其他传感器来替代PPG传感器,或者不仅包含PPG传感器,还能够包含其他传感器。例如,第1传感器部30能够为以能对心音、心电(ECG)、生物体阻抗(BIA)、或流电皮肤反应(GSR)、或者它们的组合进行测量的方式进行调试后的声音传感器、磁传感器、电压/电流传感器、热通量传感器、或压敏传感器、或者它们的任意组合。
第1传感器部30例如经由预定的接口与外部的测量装置主体连接。例如,第1传感器部30既可以经由未图示的线缆与外部的测量装置主体连接,也可以使用设于基体10内部的通信模块(例如Wi-Fi(注册商标)、Bluetooth(注册商标)等,未图示)与外部的测量装置主体无线连接。
贴合部40是具有预定的贴合力或粘合力以便能够贴合于受检者的生物体表面的构件或部分。在本例中,贴合部40自身形成第2传感器部50。第2传感器部50例如能够是用于对ECG等生物体的电信号进行测量的电极传感器。电极传感器例如由使电极元件和凝胶一体化而成的粘合垫构成。通过粘合垫的粘合力,将基体10(即,生物体信息测量器1)贴合保持于生物体表面。并且,在本实施方式中,对于粘合垫,如后述那样,以具有如下粘合力的方式来选择材料和其表面积,该粘合力能够对抗基于第1传感器部30产生的生物体表面的按压力从而使基体10不从生物体表面脱离。为了能够应对卫生方面、粘合力的劣化等而更换贴合部40(粘合垫),贴合部40(粘合垫)例如可构成为能够通过按扣等相对于基体10拆装。第2传感器部50能够包含其他传感器来替代电极传感器,或不仅包含电极传感器,而且包含其他传感器。例如,第2传感器部50能够包含以能对心音、生物体阻抗(BIA)、或者流电皮肤反应(GSR)、或者它们的组合进行测量的方式进行调试后的传感器。
第2传感器部50例如也能够经由预定的接口与外部的测量装置主体连接。例如,第2传感器部50既可以经由未图示的线缆与外部的测量装置主体连接,也可以使用设于基体10内部的通信模块来与外部的测量装置主体无线连接。
此外,也可以是,在生物体信息测量器1的底面部的一部分,相对于作为第2传感器部50的粘合垫独立地设有用于辅助粘合力的辅助粘合垫。另外,为了具有粘合力,贴合部40也可以是在使用之际涂敷粘合剂而形成的。在本例中,基体10通过贴合部40的粘合力进行贴合,但并不限于此,例如,贴合部40的全部或一部分也可以由吸盘构成。
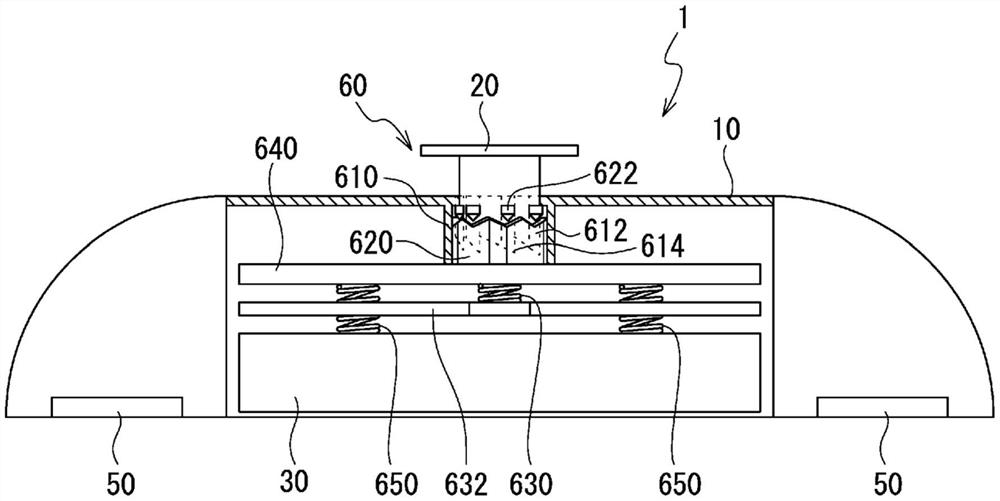
图3和图4是用于说明本发明的一个实施方式的生物体信息测量器中的可凹进的按压机构的图,更具体而言,图3表示第1传感器部30处于避让位置的状态,图4表示第1传感器部30处于突出位置的状态。为了示出第1传感器部30能够通过可凹进的按压机构而移动的样子,这些图为基体10的一部分被剖切的局部剖面。本例的可凹进的按压机构构成为,通过第1按下操作,使第1传感器部30从避让位置位移至突出位置而以预定的按压力进行施力,通过第2按下操作,释放预定的按压力而使第1传感器部30从突出位置位移至避让位置。在典型的情况下,这样的按压机构的结构能够包含已知的揿动机构而实现,但并不限于此。
即,如图3所示,生物体信息测量器1的按压机构60例如具备:揿动部20;凸轮主体610,其与基体10一体地形成,并具有凸轮槽612和齿接收部614;旋转凸轮620,其具有随着揿动部20的前进动作而沿着凸轮槽612滑动的凸轮齿622,该旋转凸轮620能够相对于凸轮主体610旋转;以及第1弹性体630,其对揿动部20和旋转凸轮620进行弹性施力。按压机构60包含止挡件(未图示),该止挡件用于对被由支承部632支承的第1弹性体630施力的揿动部20的动作进行限制。另外,按压机构60还具备:按压部640,其抵接于旋转凸轮620;以及第2弹性体650,其设置在按压部640与第1传感器部30之间,对第1传感器部30进行弹性施力。第1弹性体630和/或第2弹性体650例如能够为压缩弹簧。另外,第2弹性体650例如由4个压缩弹簧构成,对第2传感器部50进行弹性支承。或者,第1弹性体630和/或第2弹性体650也可以由海绵、橡胶、空气活塞等弹性体构成。
另外,按压机构60能够包含用于对第1传感器部30的突出量进行调整的调整部(未图示)。调整部例如构成为通过螺杆机构来调整第2弹性体650的施力。或者,调整部例如也可以是通过使爪部嵌于多级的缺口部中的任一级来调整第2弹性体650的施力的结构。
在如上那样构成的按压机构60中,在初始状态下,第1传感器部30处于从基体10的底部稍微后退了的位置(避让位置)。在该状态下,通过使用者对揿动部20的第1按下操作,揿动部20一边对抗第1弹性体630的施力一边前进(即,向图中的下方移动),与此相伴,凸轮齿622沿着凸轮槽612滑动,同时旋转凸轮620也前进。此时,与旋转凸轮620抵接的按压部640也前进,由此,借助第2弹性体650使第1传感器部30前进。当凸轮齿622到达凸轮槽612的顶端部时,凸轮齿622脱离凸轮槽612而卡合于齿接收部614,由此使旋转凸轮620旋转,将揿动部20保持为前进了的状态。因而,与揿动部20结合的按压部640也被保持为前进了的状态,由此,如图4所示,第1传感器部30被第2弹性体650弹性施力,且被保持在从基体10的底部稍微突出的位置(突出位置)。
另外,在第1传感器部30处于突出位置的状态下,通过使用者对揿动部20的第2按下操作,凸轮齿622脱离齿接收部614,使旋转凸轮620旋转。由此,凸轮齿622卡合于另外的凸轮槽612,在第1弹性体630的施力的作用下,凸轮齿622沿着凸轮槽612滑动,同时旋转凸轮620也后退,使揿动部20后退。此时,与旋转凸轮620抵接的按压部640也后退,由此,借助第2弹性体650使第1传感器部30后退。然后,凸轮齿622抵接于止挡件,由此揿动部20的后退被限制,按压部640的后退也被限制。由此,第1传感器部30被保持在原来的避让位置。
因而,在要将生物体信息测量器1安装于受检者的例如生物体表面的情况下,生物体信息测量器1通过设于基体10的底面部的贴合部40的预定的粘合力而贴合于生物体表面,从而生物体信息测量器1可靠地安装于生物体表面,而不会脱离。在该状态下,当通过使用者对揿动部20的第1按下操作来使按压部640前进时,第1传感器部30被第2弹性体650弹性施力从而也前进。当第1传感器部30抵接于生物体表面时,第1传感器部30一边对抗粘合垫的粘合力一边仍被第2弹性体650施力而停止在按压生物体表面的状态下。因而,通过使第1传感器部30以适度的按压力接触于生物体表面,生物体信息测量器1能够对第1生物体信号进行测量,另外,由于第2传感器部50通过粘合垫进行了贴合,因此能够同时测量第2生物体信号。
另外,在将生物体信息测量器1从受检者的例如生物体表面拆下的情况下,通过使用者对揿动部20的第2按下操作,第1弹性体630的压缩力被释放,第1传感器部30后退至避让位置。使用者进一步将通过粘合垫贴合于生物体表面的生物体信息测量器1剥下,由此能够拆下生物体信息测量器1。
如以上那样,采用本实施方式,能够通过底面部的粘合垫将生物体信息测量器1以预定的粘合力贴合于受检者的生物体表面,且能够以适度的按压力来简单地安装第1传感器部30,生物体信息测量器1不会意外脱落,能够可靠地测量生物体信号。尤其是,例如在第1传感器部30为PPG传感器等的情况下,在相对于生物体表面的适度的按压力的作用下,能够防止不期望的反射光的散射和/或随着动脉血的适度的压迫而增强生物体信号,由此能够更可靠地测量生物体信号。
另外,采用本实施方式,生物体信息测量器1是以贴合于受检者的生物体表面为前提来设计的,因此能够充分地确保与生物体表面之间的接触面积,因而,能够采用尺寸比较大的第1传感器部30,进而还能够将其与第2传感器部50并用。
[第2实施方式]
在本实施方式中,对包含替代上述那样的揿动机构的另一例的按压机构60的生物体信息测量器的各种变形例进行说明。
(变形例1)
图5是表示本发明的一实施方式的生物体信息测量器的结构的一个例子的图。即,如该图所示,本实施方式的生物体信息测量器1例如构成为包含基体10、第1传感器部30、包含第2传感器部50的贴合部40、以及按压机构60。本例的按压机构60构成为包含:弹性体650’,其对第1传感器部30进行弹性施力;以及3个杆部12,在该3个杆部12各自的一端部支承基体10,在杆部12的另一端部设有贴合部40。
在本例中,基体10形成为扁平的大致三棱柱状,在其角部分别配置有3个杆部12,但并不限于此。例如,基体10的外观形状也可以是扁平的圆盘状、椭圆盘状。第1传感器部30以被3个杆部12包围的方式从基体10的大致中央部延伸地设置。作为一个例子,第1传感器部30设置为,在与生物体表面对应的假想面内,第2传感器部50的几何学的重心位置与第1传感器部30的几何学的重心位置实质上一致。
在该结构中,当贴合部40抵接于受检者的生物体表面时,贴合部40通过其粘合力进行贴合而保持生物体信息测量器1,另一方面,对抗该粘合力地使第1传感器部30被弹性体650’弹性施力,按压生物体表面。因而,在该状态下,与上述实施方式同样地,第1传感器部30能够以适度的按压力抵接于生物体表面并测量第1生物体信号,另外,由于第2传感器部50通过贴合部40进行了贴合,因此能够同时测量第2生物体信号。
此外,在本发明中,将弹性体650’设为螺旋弹簧构件来说明,但并不限于此,例如,弹性体650’也可以是板簧构件、空气弹簧构件,还可以是挠性构件。同样地,将杆部12设为刚性构件来说明,但并不限于此,例如,杆部12也可以是挠性构件。或者,也可以是,替代弹性体650’,使基体10由多个杆或支承腿支承。
(变形例2)
图6和图7是表示本发明的一实施方式的生物体信息测量器的结构的一个例子的图,具体而言,图6是外观下方立体图,图7是侧剖视图。如该图所示,本实施方式的生物体信息测量器1例如构成为包含大致圆柱状或大致圆盘状的基体10、贴合部40和按压机构60。贴合部40沿着基体10的环状的底面部设置。第1传感器部30构成为,在生物体信息测量器1未抵接于受检者的生物体表面的状态下,第1传感器部30的抵接面比周围的粘合部40(第2传感器部50)的抵接面稍微突出。与上述实施方式同样地,当贴合部40抵接于受检者的生物体表面时,贴合部40通过其粘合力进行贴合而保持生物体信息测量器1,另一方面,对抗该粘合力地使第1传感器部30被弹性体650’弹性施力,按压生物体表面。
(变形例3)
图8是表示本发明的一实施方式的生物体信息测量器的结构的一个例子的图。即,在该图所示的生物体信息测量器1中,按压机构60通过由橡胶、海绵等挠性构件形成的弹性体650’构成。通过这样的结构,当基体10的天顶部(未图示)被按压时,第1传感器部30一边按压生物体表面一边被压缩,贴合部40抵接于受检者的生物体表面而被贴合。
(变形例4)
图9是表示本发明的一实施方式的生物体信息测量器的结构的一个例子的俯视图,图10是图9所示的生物体信息测量器的基体部分的侧视图。
即,如这些图所示,在本例的生物体信息测量器1中,在基体10的底面部设有第1传感器部30,另一方面,相对于基体10独立地设有第2传感器部50。也就是说,在本例中,第2传感器部50相对于贴合部40独立地构成。第2传感器部50例如能够通过线缆与基体10连接。
另外,基体10具备一体形成的杆部12,该杆部12从基体10主体的侧端部沿大致水平方向伸出,并向下方弯折,由此,杆部12的沿大致水平方向伸出的部分构成为能弹性地挠曲。也就是说,在本例中,杆部12作为弹性体650’发挥作用。在杆部12的顶端部设有用于将生物体信息测量器1贴合于生物体表面的粘合部40。由图10可知,包含基体10的底面部的面比包含粘合部40的面稍微突出。因而,在生物体信息测量器1通过贴合部40贴合于生物体表面的情况下,基体10的设有第1传感器部30的底面部以与杆部12的挠曲量相对应的力按压于生物体表面。
因而,在上述例子中,同样地,当贴合部40抵接于受检者的生物体表面时,贴合部40通过其粘合力进行贴合而保持生物体信息测量器1,另一方面,对抗该粘合力地使第1传感器部30在杆部12的挠曲力的作用下按压生物体表面。因而,在该状态下,与上述实施方式同样地,第1传感器部30能够以适度的按压力接触于生物体表面并测量第1生物体信号,另外,相对于基体10独立地构成的第2传感器部50也能够同时测量第2生物体信号。
(变形例5)
图11是表示本发明的一实施方式的生物体信息测量器的外观结构的一个例子的下方立体图,图12是表示图11所示的生物体信息测量器的外观结构的一个例子的侧视图。
如这些图所示,本例的生物体信息测量器1构成为包含大致圆盘形状的基体10,但并不限于此。基体10例如以直径约为40mm、高度约为10mm的大小构成,但并不限于此。例如,构成为包含大致十字形状的基板302的第1传感器部30借助弹性体650’弹性地设于基体10的底面部。另外,在基体10的底面部中的、除第1传感器部30以外的部分(即,四分之一圆形形状部分或扇形形状部分),设有贴合部40。
第1传感器部30包含在基板302上设置的多个(在本例中为5个)传感器304。在本发明中,传感器304能够是发光元件和光接收元件那样的构成有源传感器的各个传感器构成元件。基板302例如全部或其一部分可以是刚性基板,或者也可以是柔性基板,总之,基板302只要是能够支承并适当地按压传感器304的构件即可。在本例中,第1传感器部30形成为大致十字形状,但并不限于此,也可以是细长板形形状,还可以是大致Y字形状(参照图13)。传感器304例如配置于基板302的第1面(即,与受检者的生物体表面相对的面)的各端部和中央部。传感器304中的几个传感器304或全部传感器304例如是包括分别照射出具有不同波长的两种光的发光元件和接收该发光元件的反射光的光接收元件的PPG传感器。在本例中,传感器304在基板302上呈几何学对称地配置,但也可以非对称地配置。
弹性体650’以能够稳定地弹性支承基板302的方式例如由多个(在本例中为5个)螺旋弹簧构成,但如上所述,并不限于此。在本例中,由于弹性体650’在与PPG传感器相对应的位置处弹性地支承基板302的与第1面相反的那侧的第2面的各端部和中央部,因此,不会损害对生物体表面的形状的追随性,能够以适度的按压力来按压各传感器304。
与上述实施方式同样地,贴合部40能够构成为包含第2传感器部50。在本例中,贴合部40形成于4个四分之一圆的区域,但并不限于此,贴合部40也可以形成于周缘部分。在典型的情况下,贴合部40的形状和大小取决于基体10的形状与第1传感器部30的形状之间的关系。
例如,如图13的(a)所示,在大致圆盘状的基体10的底面设有细长板形形状的第1传感器部30的情况下,能够选择俯视时为大致半圆形形状的贴合部40。另外,如图13的(b)所示,在大致圆盘状的基体10的底面设有大致Y字形状的第1传感器部30的情况下,能够选择俯视时中心角约为60度的大致扇形形状的贴合部40。另外,如图13的(c)所示,生物体信息测量器1也可以是不仅设有大致扇形形状的贴合部40,而且在大致Y字形状的第1传感器部30的中央部也设有贴合部40的结构。
或者,例如,如图14所示,在扁平的大致矩形板形形状的基体10的底面设有大致十字形状的第1传感器部30的情况下,能够选择俯视时为大致矩形形状的贴合部40。另外,虽未图示,但也可以是,大致十字形状的第1传感器部30以位于大致矩形板形形状的基体10的对角线上的方式设置,在其余的部分设有贴合部40。
如以上叙述那样,当贴合部40抵接于受检者的生物体表面时,贴合部40通过其粘合力进行贴合而保持生物体信息测量器1,另一方面,对抗该粘合力地使第1传感器部30在弹性体650’的按压力的作用下可靠地按压生物体表面。因而,在该状态下,与上述实施方式同样地,第1传感器部30能够以适度的按压力接触于生物体表面并测量第1生物体信号。另外,基体10虽然是大致矩形板形形状,但没有突起部分,因而,在安装于受检者的期间内,不会有因穿着的衣服等发生钩挂而使生物体信息测量器1脱离这样的不良情况。
(变形例6)
图15是表示本发明的一实施方式的生物体信息测量器的外观结构的一个例子的侧视图,图16是表示图15所示的生物体信息测量器的外观结构的一个例子的仰视图。
如这些图所示,本例的生物体信息测量器1构成为包含扁平的大致长方体形状的基体10和从基体10的两端部伸出的杆部12。基体10例如以长边轴线方向的长度约为40mm、短边轴线方向的长度约为10mm以及高度约为10mm的大小构成,但并不限于此。第1传感器部30以大致沿着基体10的外形并经由多个(在本例中为3个)弹性体650’被弹性地支承的方式设于基体10的底面部。
与上述例同样地,第1传感器部30构成为包含基板302。基板302例如以长边轴线方向的长度约为30mm、短边轴线方向的长度(宽度)约为10mm以及高度约为10mm的大小构成。在基板302上设有多个传感器304。在本例中,多个传感器304配置于基板302的两端部和中央部,但并不限于此。例如,也可以是,在基板302的一端部配置两个传感器304,在基板302的另一端部配置1个传感器304。
弹性体650’以能够稳定地弹性支承基板302的方式例如由多个(在本例中为3个)螺旋弹簧构成,但如上所述,并不限于此。在本例中,基板302具有在未与受检者的生物体表面抵接的状态下形成为弯曲状或拱状的弯曲部。基板302的弯曲部在抵接于受检者的生物体表面时,能够追随生物体表面的形状而挠曲,并且能够与弹性体650’的按压力一起按压传感器304。此外,基板302只要是追随生物体表面的形状而挠曲的构件即可,其刚性或挠性的程度能够适当选择。
贴合部40被从基体10的两端部伸出的杆部12支承。杆部12例如以伸出方向的长度约为5mm、高度约为3mm的大小构成,贴合部40例如由最大宽度约为20mm的椭圆形形状构成。此外,在本例中,示出了杆部12设于扁平的大致长方体形状的基体10的结构,但并不限于此,杆部12能够设于上述那样的各种形状的基体10。
如以上叙述那样,在上述例子中,当贴合部40抵接于受检者的生物体表面时,贴合部40通过其粘合力进行贴合而保持生物体信息测量器1,另一方面,对抗该粘合力地使第1传感器部30在基板302的挠曲力和弹性体650’的按压力的作用下可靠地按压生物体表面。因而,在该状态下,与上述实施方式同样地,第1传感器部30能够以适度的按压力接触于生物体表面并测量第1生物体信号。另外,基体10为薄型形状且没有突起部分,因此,在安装于受检者的期间内,不会有钩挂穿着的衣服等而使生物体信息测量器1脱离这样的不良情况。
[第3实施方式]
在本实施方式中,说明在上述实施方式的生物体信息测量器1中规定了第1传感器部与贴合部之间的几何学的位置关系的结构的例子。
图17是用于说明本发明的一实施方式的生物体信息测量器中的第1传感器部与贴合部之间的几何学的位置关系的一个例子的图。即,如该图所示,第1传感器部30和贴合部40以在包含受检者的生物体表面的假想面中贴合部40的粘合面的重心位于第1传感器部30(基板302)的抵接面内的方式设于基体10。
即,在图17的(a)中,示出了两个贴合部40分别设于第1传感器部30的长边端部的附近的例子。因而,两个贴合部40的粘合面的重心位于第1传感器部30的基板302的抵接面内(更准确地讲是长边轴线上)。
另外,在图17的(b)中,示出了3个贴合部40设于第1传感器部30的周围的例子。贴合部40的粘合面的重心位置与以各个粘合面为顶点的三角形的重心位置一致,且位于第1传感器部30的抵接面内。
另外,在图17的(c)中,示出了第1传感器部30和贴合部40以第1传感器部30的抵接面的重心位置和贴合部40的贴合面的重心位置大致一致的方式设于基体10的例子。
或者,生物体信息测量器1也可以构成为,第1传感器部30的抵接面的重心位置和多个弹性体650’的重心位置成为大致一致,对此未图示。
图18是用于说明本发明的一实施方式的生物体信息测量器中的第1传感器部与贴合部之间的几何学的位置关系的一个例子的图。更具体而言,该图示出了设于第1传感器部30的传感器304(304a、304b)的重心G与贴合部40的粘合面的重心之间的位置关系。
即,如该图所示,与1个传感器304或多个相互接近的传感器304相关联的多个贴合部40的粘合面的重心位置与该传感器304的重心位置大致一致。另外,虽未图示,但例如,贴合部40被从基体10伸出的臂部12支承。在此,“与1个传感器304或多个相互接近的传感器304相关联的多个贴合部40的粘合面”是指,多个贴合部40中的、位于1个传感器304或多个相互接近的传感器304的附近且是其粘合力与相对于传感器304的按压力相互密切关联的贴合部40的粘合面。就该图所示的例子而言,两个贴合部40的粘合面40a与传感器304a相关联,另外两个贴合部40的粘合面40b与两个传感器304b相关联。并且,两个粘合面40a的重心位置与1个传感器304a的重心位置大致一致,另外,两个粘合面40b的重心位置与两个传感器304b的重心位置大致一致。
另外,构成第1传感器部30的基板302也可以如上述那样为柔性基板。因而,在贴合部40的粘合面的重心位置与传感器304大致一致的情况下,如图19的(a)和图19的(b)所示,根据受检者的生物体表面的台阶或曲面形状,基板302的形状会追随性地挠曲,且传感器304可靠地按压受检者的生物体表面。
图20是用于说明本发明的一实施方式的生物体信息测量器中的第1传感器部与贴合部之间的几何学的位置关系的一个例子的图。具体而言,该图示出了在包含受检者的生物体表面的假想面中从第1传感器部30的重心位置到贴合部40的粘合面的距离的关系。此外,在本例中,也以粘合面的重心位置被包含于第1传感器部的抵接面为条件。
在本例中,从第1传感器部30的重心位置到各贴合部40的粘合面的距离最大约为10cm。也就是说,以第1传感器部30为中心的一对贴合部40彼此配置为最大分开约20cm。由此,能够抑制由设于贴合部40的第2传感器部50检测的生物体信号(例如ECG信号)的SN比的劣化。
此外,第1传感器部30与贴合部40之间的几何学的位置关系并不限于上述例子,能够设想到各种位置关系。例如,在第1传感器部30由多个基板302构成的情况下,第1传感器部30和贴合部40也可以以贴合部40的粘合面的重心位置与第1传感器部30的抵接面的重心位置大致一致的方式配置。
如以上那样,采用本实施方式,当贴合部40抵接于受检者的生物体表面时,贴合部40通过其粘合力进行贴合而保持生物体信息测量器1,另一方面,对抗该粘合力地使第1传感器部30在弹性体650’的按压力的作用下可靠地按压生物体表面。因而,在该状态下,与上述实施方式同样地,第1传感器部30能够以适度的按压力接触于生物体表面并测量第1生物体信号。
上述各实施方式是用于说明本发明的例示,并非旨在将本发明仅限定于这些实施方式。本发明只要不脱离其主旨,就能够以各种形态来实施。
例如,在本说明书所公开的方法中,只要其结果不产生矛盾,则也可以并行或按不同的顺序来实施步骤、动作或功能。所说明的步骤、动作和功能仅作为例子而被提供,能够在不脱离发明主旨的范围内省略步骤、动作和功能中的几个,另外,可以通过使它们相互结合而成为一个,另外,也可以追加其他的步骤、动作或功能。
另外,在本说明书中,虽然公开了各种实施方式,但能够对一实施方式中的特定特征(技术事项)进行适当改进,并将其追加到其他的实施方式中,或将其与该其他实施方式中的特定特征置换,那样的形态也包含在本发明的主旨中。
本发明能够广泛地用于对生物体信息进行测量的装置的领域中。例如,本发明能够用于对PPG、心音、血压、心率数、流电皮肤反应等进行测量的各种装置中。
1、生物体信息测量器;10、基体;12、杆部;20、揿动部;30、第1传感器部;302、基板;304、传感器、传感器构成元件;40、贴合部;50、第2传感器部;60、按压机构;610、凸轮主体;612、凸轮槽;614、齿接收部;620、旋转凸轮;622、凸轮齿;630、第1弹性体;640、按压部;650、第2弹性体;650’、弹性体。
- 生物体信息评价装置、生物体信息测定装置、生物体信息评价方法、生物体信息评价程序
- 生物体信息处理装置、生物体信息处理系统、生物体信息的压缩方法以及生物体信息的压缩处理程序