三自由度九档复合行星传动机构
文献发布时间:2023-06-19 11:59:12
技术领域
本发明属于机械设计技术领域,具体涉及变速箱的传动方案设计,具体涉及一种三自由度九档复合行星传动机构。
背景技术
行星变速具有结构紧凑、多点啮合传递动力、传动时径向力平衡的优势,使得其在多档位自动变速箱变速箱中应用广泛。复合行星排更大的缩小了变速机构体积,双星行星排还可得到比单星行星排更广的传动范围,能够获得较宽的传动域。自动变速箱消除了手动变速箱需要驾驶员频繁换挡的弊端,因此为了获得更好的传动特性,使车辆可以接近无级变速,在空间允许的情况下,设计档位多、阶比小的变速机构能更大地适应驾驶需求,需要此方案具有九个前进挡一个倒档,每档阶比小,极大地满足了多档自动变速箱需求。
发明内容
(一)要解决的技术问题
本发明要解决的技术问题是:如何提供一种九档复合行星变速方案,该方案可以实现九个前进档一个倒档共计十个档位,通过控制不同组合离合器与制动器的结合、分离实现换挡。
(二)技术方案
为解决上述技术问题,本发明提供一种三自由度九档复合行星传动机构,其包括:输入构件①、输出构件⑦、复合行星排、传动构件、制动器和离合器;
所述输入构件①、输出构件⑦安装在两端,分别与输入轴、输出轴连接;
所述复合行星排两个,分别为第一复合行星排P1、第二复合行星排P2;
所述传动构件五个,分别为第一传动构件②、第二传动构件③、第三传动构件④、第四传动构件⑤、第五传动构件⑥;
所述制动器四个,分别为第一制动器B1、第二制动器B2、第三制动器B3、第四制动器B4;
所述离合器两个,分别为第一离合器C1、第二离合器C2;
所述第一复合行星排P1中,包括第一行星排P11和第二行星排P12;
所述第二复合行星排P2中,包括第三行星排P21和第四行星排P22;
所述第一行星排P11分别与输出构件⑦、第二传动构件③、第四传动构件⑤连接;
所述第二行星排P12分别与输出构件⑦、第二传动构件③、第五传动构件⑥连接;
所述第三行星排P21分别与第三传动构件④、第一传动构件②、第二传动构件③连接;
所述第四行星排P22分别与第三传动构件④、第一传动构件②、输入构件①连接;
所述第一制动器B1用于制动第四传动构件⑤;
所述第二制动器B2用于制动第五传动构件⑥;
所述第三制动器B3用于制动第二传动构件③;
所述第四制动器B4用于制动第一传动构件②;
所述第一离合器C1分别连接输出构件⑦和第三传动构件④;
所述第二离合器C2分别连接输出构件⑦和第一传动构件②。
其中,所述第一行星排P11、第四行星排P22为内外啮合双星行星排,所述第二行星排P12、第三行星排P21为普通行星排。
其中,所述第一行星排P11、第二行星排P12、第三行星排P21、第四行星排P22分别包括太阳轮、齿圈和行星架。
其中,所述第一行星排P11包括第一齿圈R11,所述第二行星排P12包括第二齿圈R12;
所述第一行星排P11与第二行星排P12共用同一太阳轮,即第一太阳轮S1,作为第一复合行星排P1的太阳轮;
所述第一行星排P11与第二行星排P12共用同一行星架,即第一行星架CA1,作为第一复合行星排P1的行星架。
其中,所述第三行星排P21包括第三齿圈R21,第四行星排P22包括第四齿圈R22;
所述第三行星排P21与第四行星排P22共用同一太阳轮,即第二太阳轮S2,作为第二复合行星排P2的太阳轮;
所述第三行星排P21与第四行星排P22共用同一行星架,即第二行星架CA2,作为第二复合行星排P2的行星架。
其中,所述输入构件①连接第四行星排P22的第四齿圈R22;
所述传动构件②分别连接第二复合行星排P2的第二行星架CA2、第四制动器B4的内毂和第二离合器C2的内毂;
所述传动构件③分别连接第三行星排P21的第三齿圈R21、第一复合行星排P1的第一行星架CA1和第三制动器B3的内毂;
所述传动构件④分别连接第二复合行星排P2的第二太阳轮S2和第一离合器C1的内毂;
所述传动构件⑤分别连接第一行星排P11的第一齿圈R11和第一制动器B1的内毂;
所述传动构件⑥分别连接第二行星排P12的第二齿圈R12和第二制动器B2的内毂;
所述输出构件⑦分别连接第一复合行星排P1的第一太阳轮S1、第一离合器C1的外毂和第二离合器C2的外毂。
其中,所述第一复合行星排P1包括第一双星行星轮;
所述第一双星行星轮中包括第一行星轮X1和第二行星轮X11;
所述第一行星轮X1与第一太阳轮S1外啮合,为第一行星排P11和第二行星排P12的共用行星轮;
所述第一行星轮X1与第一行星排P11的第二行星轮X11外啮合,第二行星轮X11与第一齿圈R11内啮合,第一行星轮X1与第二行星排P12的第二齿圈R12内啮合。
其中,所述第二复合行星排P2包括第二双星行星轮;
所述第二双星行星轮中包括第三行星轮X2和第四行星轮X22;
所述第三行星轮X2与第二太阳轮S2外啮合,为第三行星排P21和第四行星排P22的共用行星轮;
所述第三行星轮X2与第四行星排P22的第四行星轮X22外啮合,第四行星轮X22与第四齿圈R22内啮合,第三行星轮X2与第三行星排P21的第三齿圈R21内啮合。
其中,所述各个行星排的特性参数为:K
其中,所述传动机构用于实现九个前进档位以及一个倒档。
(三)有益效果
与现有技术相比较,本发明的九档复合行星变速机构包括输入轴、输出轴,两个复合行星排,六个操纵件;六个操纵件连接行星排的基本构件与输出轴,实现所需的变速控制。
本发明的优点为采用两个复合行星排提供一种空间占比小、传动范围宽的多档传动方案,能够实现九个前进档和一个倒档,可适用于自动变速器,通过制动器与离合器控制传动构件的运动状态,换挡逻辑简单,易于实现,减少了零件数量,使变速机构结构紧凑。
附图说明
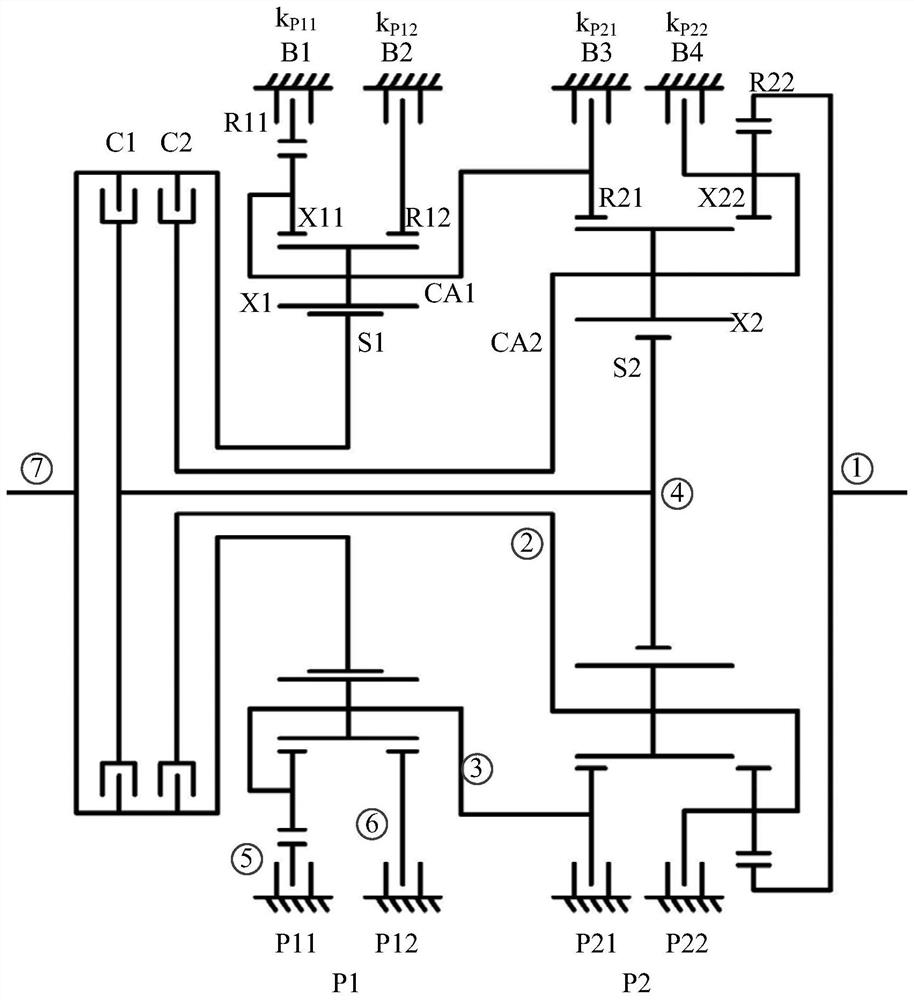
图1为本发明的机构简图。
其中,P1、P2为两个复合行星排,P11、P12、P21、P22为构成两个复合行星排的内外啮合双星排和普通排,①为输入构件,⑦为输出构件,②、③、④、⑤、⑥为五个基本传动构件,①为主动件,⑦为被动件,B1-B4为四个制动器,C1、C2为两个离合器。
其中R11为P11排齿圈、R12为P12排齿圈、CA1为P1排行星架、S1为P1排太阳轮;R21为P21排齿圈、R22为P22排齿圈、CA2为P2排行星架、S2为P2排太阳轮。
具体实施方式
为使本发明的目的、内容、和优点更加清楚,下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。
为解决上述技术问题,本发明提供一种三自由度九档复合行星传动机构,其包括:输入构件①、输出构件⑦、复合行星排、传动构件、制动器和离合器;
所述输入构件①、输出构件⑦安装在两端,分别与输入轴、输出轴连接;
所述复合行星排两个,分别为第一复合行星排P1、第二复合行星排P2;
所述传动构件五个,分别为第一传动构件②、第二传动构件③、第三传动构件④、第四传动构件⑤、第五传动构件⑥;
所述制动器四个,分别为第一制动器B1、第二制动器B2、第三制动器B3、第四制动器B4;
所述离合器两个,分别为第一离合器C1、第二离合器C2;
所述第一复合行星排P1中,包括第一行星排P11和第二行星排P12;
所述第二复合行星排P2中,包括第三行星排P21和第四行星排P22;
所述第一行星排P11分别与输出构件⑦、第二传动构件③、第四传动构件⑤连接;
所述第二行星排P12分别与输出构件⑦、第二传动构件③、第五传动构件⑥连接;
所述第三行星排P21分别与第三传动构件④、第一传动构件②、第二传动构件③连接;
所述第四行星排P22分别与第三传动构件④、第一传动构件②、输入构件①连接;
所述第一制动器B1用于制动第四传动构件⑤;
所述第二制动器B2用于制动第五传动构件⑥;
所述第三制动器B3用于制动第二传动构件③;
所述第四制动器B4用于制动第一传动构件②;
所述第一离合器C1分别连接输出构件⑦和第三传动构件④;
所述第二离合器C2分别连接输出构件⑦和第一传动构件②。
其中,所述第一行星排P11、第四行星排P22为内外啮合双星行星排,所述第二行星排P12、第三行星排P21为普通行星排。
其中,所述第一行星排P11、第二行星排P12、第三行星排P21、第四行星排P22分别包括太阳轮、齿圈和行星架。
其中,所述第一行星排P11包括第一齿圈R11,所述第二行星排P12包括第二齿圈R12;
所述第一行星排P11与第二行星排P12共用同一太阳轮,即第一太阳轮S1,作为第一复合行星排P1的太阳轮;
所述第一行星排P11与第二行星排P12共用同一行星架,即第一行星架CA1,作为第一复合行星排P1的行星架。
其中,所述第三行星排P21包括第三齿圈R21,第四行星排P22包括第四齿圈R22;
所述第三行星排P21与第四行星排P22共用同一太阳轮,即第二太阳轮S2,作为第二复合行星排P2的太阳轮;
所述第三行星排P21与第四行星排P22共用同一行星架,即第二行星架CA2,作为第二复合行星排P2的行星架。
其中,所述输入构件①连接第四行星排P22的第四齿圈R22;
所述传动构件②分别连接第二复合行星排P2的第二行星架CA2、第四制动器B4的内毂和第二离合器C2的内毂;
所述传动构件③分别连接第三行星排P21的第三齿圈R21、第一复合行星排P1的第一行星架CA1和第三制动器B3的内毂;
所述传动构件④分别连接第二复合行星排P2的第二太阳轮S2和第一离合器C1的内毂;
所述传动构件⑤分别连接第一行星排P11的第一齿圈R11和第一制动器B1的内毂;
所述传动构件⑥分别连接第二行星排P12的第二齿圈R12和第二制动器B2的内毂;
所述输出构件⑦分别连接第一复合行星排P1的第一太阳轮S1、第一离合器C1的外毂和第二离合器C2的外毂。
其中,所述第一复合行星排P1包括第一双星行星轮;
所述第一双星行星轮中包括第一行星轮X1和第二行星轮X11;
所述第一行星轮X1与第一太阳轮S1外啮合,为第一行星排P11和第二行星排P12的共用行星轮;
所述第一行星轮X1与第一行星排P11的第二行星轮X11外啮合,第二行星轮X11与第一齿圈R11内啮合,第一行星轮X1与第二行星排P12的第二齿圈R12内啮合。
其中,所述第二复合行星排P2包括第二双星行星轮;
所述第二双星行星轮中包括第三行星轮X2和第四行星轮X22;
所述第三行星轮X2与第二太阳轮S2外啮合,为第三行星排P21和第四行星排P22的共用行星轮;
所述第三行星轮X2与第四行星排P22的第四行星轮X22外啮合,第四行星轮X22与第四齿圈R22内啮合,第三行星轮X2与第三行星排P21的第三齿圈R21内啮合。
其中,所述各个行星排的特性参数为:K
其中,所述传动机构用于实现九个前进档位以及一个倒档。
实施例1
本实施例如图1所示,本方案的行星变速机构适用于发动机或电机提供动力的自动变速箱。其中各行星排按P11、P12、P21、P22顺序排列,各个行星排之间利用传动构件连接,输入轴与输入构件①相连,用于将发动机或电机的动力传至变速器。输出轴与输出构件⑦连接,通过分动器或差速器将动力传至前、后桥或左、右驱动轮。该变速器相对于旋转中心是基本对称的。
下面结合附图和实例对本发明所提供的用于自动变速箱的行星变速机构作进一步说明。
P1排为复合行星排,由P1排太阳轮S1,P1排行星架CA1,P1排双星行星轮X1、X11,P11排齿圈R11,P12排齿圈R12组成。其中双星行星轮中与P1排太阳轮S1啮合的行星轮X1为P11排和P12排共用行星轮,太阳轮S1与行星轮X1外啮合,行星轮X1与P11排行星轮X11外啮合,行星轮X11与齿圈R11内啮合,行星轮X1与P12排齿圈R12内啮合。
P2排为复合行星排,由P2排太阳轮S2,P2排行星架CA2,P2排双星行星轮X2、X22,P21排齿圈R21,P22排齿圈R22组成。其中双星行星轮中与P2排太阳轮S2啮合的行星轮X2为P21排和P22排共用行星轮,太阳轮S2与行星轮X2外啮合,行星轮X2与P22排行星轮X22外啮合,行星轮X22与齿圈R22内啮合,行星轮X2与P21排齿圈R21内啮合。
图1中各个行星排的特性参数K
以下是各个档位实现的说明,此传动方案实现的九个前进档位分别标记为:D1-D9,倒档标记为R,现分析如下:
(1)结合制动器B1、B4实现D1档
制动器B1、B4结合,使P11排齿圈R11、P2排行星架CA2转速为零。动力由输入轴传入输入构件①,经由P22排齿圈R22、P22排行星轮X22、P2排行星轮X2、P21排齿圈R21、P1排行星架CA1、P1排太阳轮S1传至输出构件⑦,实现D1档。
(2)结合制动器B4,离合器C1实现D2档
制动器B4结合,使得P2排行星架CA2转速为零,离合器C1结合,使得P2排太阳轮S2、P1排太阳轮S1与输出构件⑦转速相同。动力由输入轴传入输入构件①,经由P22排齿圈R22、P22排行星轮X22、P2排行星轮X2、P2排行星轮S2传至输出构件⑦,实现D2档。
(3)结合制动器B1,离合器C1实现D3档
制动器B1结合,使得P11排齿圈R11转速为零,离合器工作状态与D2档相同。动力由输入轴传入输入构件①,经由P22排齿圈R22、P2排行星架CA2、P21排齿圈R21传至P1排行星架CA1,再经P1排太阳轮S1传至输出构件⑦,实现D3档。
(4)结合制动器B3,离合器C1实现D4档
制动器B3结合,使得P21排齿圈R21转速为零,离合器工作状态与D2档相同。动力由输入轴传入输入构件①,经由P22排齿圈R22、P2排行星架CA2、P2排太阳轮S2传至输出构件⑦,实现D4档。
(5)结合制动器B2,离合器C1实现D5档
制动器B2结合,使得P12排齿圈R12转速为零,离合器工作状态与D2档相同。动力由输入轴传入输入构件①,经由P22排齿圈R22、P2排行星架CA2、P21排齿圈R21传至P1排行星架CA1,再由P1排太阳轮S1传至输出构件⑦,实现D5档。
(6)结合离合器C1、C2实现D6档
离合器C1、C2结合,使得P1排太阳轮S1、P2排太阳轮S2、P2排行星架CA2与输出构件⑦转速相同,此时P2排整体回转,各传动构件转速与输入转速相等,使得P21排齿圈R21传至P1排行星架CA1的转速与输入转速相等,进一步地P1排也整体回转。整个变速机构各传动构件转速均相等,传动比为1,实现D6档,D6档为直接档。
(7)结合制动器B2,离合器C2实现D7档
制动器B2结合,使得P12排齿圈R12转速为零,离合器C2结合,使得P2排行星架CA2、P1排太阳轮S1与输出构件⑦转速相同。动力由输入轴传入输入构件①,经由P22排齿圈R22、P2排行星架CA2、P21排齿圈R21传至P1排行星架CA1,再由P1排太阳轮S1传至输出构件⑦,实现D7档。
(8)结合制动器B3,离合器C2实现D8档
制动器B3结合,使得P21排齿圈R21转速为零,离合器工作状态与D7档相同。动力由输入轴传入输入构件①,经由P22排齿圈R22传至P2排行星架CA2,通过离合器C2的连接传至输出构件⑦,实现D8档。
(9)结合制动器B1,离合器C2实现D9档
制动器B1结合,使得P11排齿圈R11转速为零,离合器工作状态与D7档相同。动力由输入轴传入输入构件①,经由P22排齿圈R22、P2排行星架CA2、P21排齿圈R21传至P1排行星架CA1,再由P1排太阳轮S1传至输出构件⑦,实现D9档。
(10)结合制动器B1、B4,实现R档
制动器B2结合,使得P12排齿圈R12转速为零,制动器B4结合,使得P2排行星架CA2转速为零。动力由输入轴传入输入构件①,经由P22排齿圈R22、P22排行星轮X22、P2排行星轮X2、P21排齿圈R21传至P1排行星架CA1,再由P1排太阳轮S1传至输出构件⑦,实现R档。
表1为变速机构档位和传动比,此表描述了实现各个档位所需要结合的操纵件,同时给出了档位之间的阶比。
表1实现各档位的操纵件结合顺序及传动比
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明技术原理的前提下,还可以做出若干改进和变形,这些改进和变形也应视为本发明的保护范围。
- 三自由度八档复合行星传动机构
- 一种齿轮带轮复合式三自由度球面并联机构传动装置