一种绳状水洗机的提布轮换向驱动机构
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及织物水洗设备技术领域,具体涉及一种绳状水洗机的提布轮换向驱动机构。
背景技术
用于连续洗涤的水洗机可以达到更好的水洗效果,它包括至少两个水槽,织物通过输送装置依次进入各个水槽内逐次洗涤,将织物逐步洗涤干净,现在的水洗机对织物只进行横向的输送与洗涤,织物在水槽内的停留时间较短,水洗效果不佳。针对绳状织物的水洗过程中,由于织物呈绳状卷在一起,更加需要足够时间的浸洗和涮洗。
有一种针对绳状织物的水洗方式,通过在相邻的两个水槽之间设置织物输送装置,该织物输送装置能够交替地按照正反两个方向运行,使织物交替地堆积在两个水槽中;该织物输送装置向某一个方向运行,将织物累积堆置在其中一个水槽内,当另一水槽内的织物累积终止时,该织物输送装置需要反向运行,使织物能够交替在相邻两个水槽内累积。此种水洗方式的难点在于如何实现织物输送装置的自动换向,并保证不损伤织物,目前实现该目的的机构都比较复杂,生产成本高,灵敏度和稳定性难以保证。
发明内容
本发明的目的在于,提供一种绳状水洗机的提布轮换向驱动机构,以解决背景技术中提及的现有技术的不足。
为达成上述目的,本发明提供如下技术方案:一种绳状水洗机的提布轮换向驱动机构,包括水槽和设置于水槽端部上方的提布轮,所述提布轮能够交替地带动织物进入或离开水槽,使得织物能够累积在水槽内,所述水槽相对中部的上方设有可摆动的张力杆和与张力杆相联的传感器装置,将用于控制所述提布轮装置相对反向运行的控制信号对应于张力杆的摆动;所述水槽中织物的累积终止时在织物升高的过程中通过织物作用在所述张力杆上的力能够使张力杆摆动。
作为优选,所述张力杆包括摆动臂和沿水槽宽度方向横置的横杆,所述摆动臂能够绕其一端沿水槽长度方向的竖直平面摆动,所述横杆固定设置于所述摆动臂的自由端。
作为优选,所述横杆的长度略小于水槽的宽度。
作为优选,所述水槽上方纵向设有一支撑杆,所述支撑杆上设有一对张力杆固定板,所述张力杆的两个摆动臂可转动地设置于所述的一对张力杆固定板上。
作为优选,所述张力杆固定板上设有用于限制所述张力杆角度行程的限位杆。
作为优选,所述传感器装置包括感应力臂、磁感应头和设置于水槽上方预定位置并配合感应的磁性传感器,所述感应力臂的一端与张力杆固定连接并与张力杆同步转动,所述感应力臂的另一端与磁感应头固定连接。
作为优选,所述提布轮通过伺服电机驱动,所述磁性传感器与控制装置连接,所述控制装置与伺服电机连接。
本发明与现有技术相对比,其有益效果在于:本发明通过张力杆和传感器装置的联动实现提布轮装置的运行方向控制,其结构简单,有效利用了水槽的上部空间,并且传感方式灵敏、稳定。
附图说明
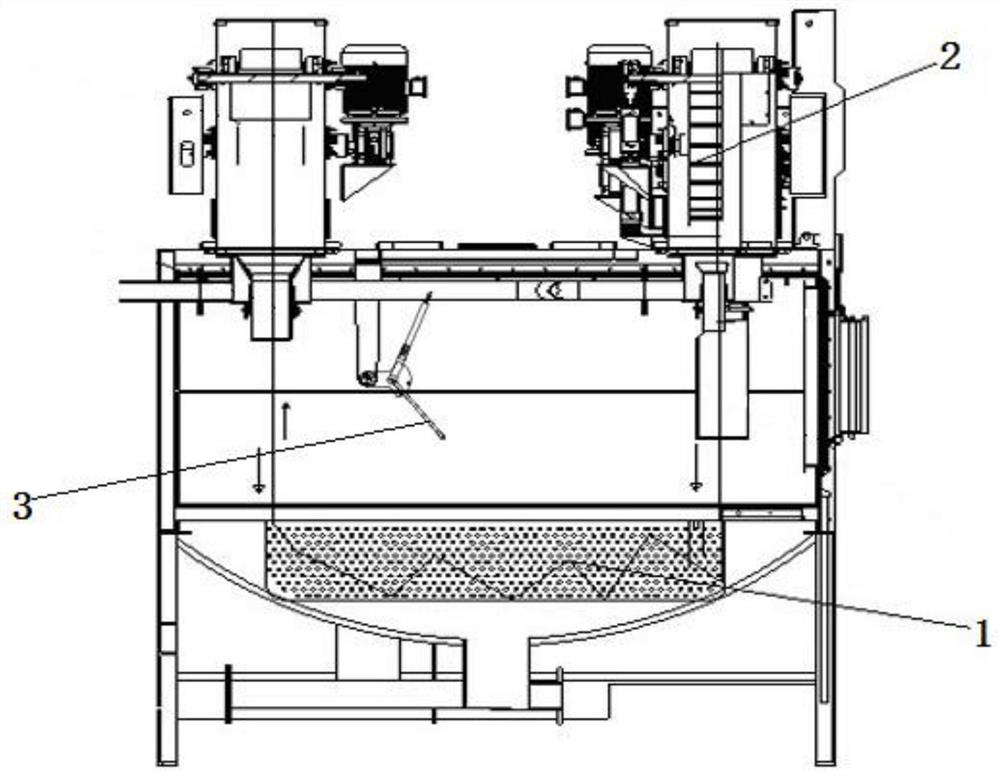
图1是本发明的整体结构示意图。
图2是本发明中张力杆的立体示意图。
图3是本发明中张力杆的侧面示意图。
图中:1、水槽;2、提布轮;3、张力杆;4、摆动臂;5、支撑杆;6、固定力臂;7、张力杆固定板;8、限位杆;9、感应力臂;10、磁感应头。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,下面通过实施例并结合附图,对本发明作进一步具体的说明。
实施例:一种绳状水洗机的提布轮换向驱动机构,如图1-3所示,包括相邻的两个水槽1和设置于两水槽之间的提布轮2,提布轮2能够带动织物在两水槽1间交替输送,使得织物能够交替地累积在两个水槽1中,从而使织物较长时间地堆置在水槽1内,延长洗涤时间,提高洗涤效果与洗涤效率。
上述结构中,水槽1内织物的上方设有能够在一定角度区间内摆动的张力杆3和与张力杆3相联的传感器装置,将用于控制提布轮2相对反向转动的控制信号对应于张力杆3的摆动,即通过张力杆3的摆动带动传感器装置发出控制信号,从而控制提布轮2相对反向转动。当某一水槽中织物的累积终止时,织物在被拉伸的同时会上升,在织物升高的过程中通过织物作用在张力杆3上的推力来带动张力杆3摆动。
具体地,水槽1的相对中部沿水槽1宽度方向设有一根支撑杆5,支撑杆5的两端分别通过固定力臂6固定设置于水洗机的两侧壁上,支撑杆5上设有一对张力杆固定板7,张力杆3可摆动地设置于一对张力杆固定板7之间,张力杆3整体呈U形,包括两个摆动臂4和一横杆,摆动臂4的一端可转动地设置于张力杆固定板7之间,横杆连接在两个摆动臂4的自由端之间,横杆沿水槽的宽度方向横置,其长度略小于水槽的宽度,确保织物在水槽内上升时能够接触到横杆。
张力杆固定板7上在张力杆3的两臂上下两侧分别设有用于限制张力杆3角度行程的限位杆8,使得张力杆3在一定角度区间内摆动,并且应当知道,张力杆3位于最低位置时其角度应偏离竖直方向。
传感器装置包括感应力臂9、磁感应头10和设置于水槽上方的机体上预定位置并与磁感应头10配合感应的磁性传感器(图中未示出),感应力臂9的一端与张力杆3的摆动臂固定连接并与张力杆3同步转动,感应力臂9的另一端与磁感应头10固定连接。磁性传感器连接有控制装置,控制装置与提布轮2的驱动装置相连,本实施例中提布轮2的驱动装置为伺服电机。
当某一水槽内的织物累积终止时,即该水槽内堆置的织物被提布轮2全部输送并堆置在相邻水槽内,此时该水槽内的织物将在提布轮2的拉动下上升,在上升过程中接触到张力杆3后给了张力杆3一个推力,促使张力杆3向上摆动一定角度(为保证灵敏度,该角度很小,例如不大于3°)后,磁感应头10同步摆动与磁性传感器发生配合感应,控制装置接收到磁性传感器的信号后,控制提布轮2反向运行,将相邻水槽内堆置的织物再反向输送至该水槽,以此类推,从而实现织物在相邻水槽间的交替输送。
上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
- 一种绳状水洗机的提布轮换向驱动机构
- 一种绳状水洗机的提布轮换向驱动机构