一种电动汽车防溜坡的控制方法、整车控制器及电动汽车
文献发布时间:2023-06-19 11:59:12
技术领域
本发明涉及电动汽车技术领域,特别涉及一种电动汽车防溜坡的控制方法、存储介质及电动汽车。
背景技术
电动汽车(BEV)是指以车载电源为动力,用电机驱动车轮行驶,符合道路交通、安全法规各项要求的车辆。由于对环境影响相对传统汽车较小,其前景被广泛看好。
而电动汽车在上坡行驶时,由于重力作用,汽车存在下滑趋势,特别是在坡道停车、起步时,经常由于出现溜坡现象而造成安全事故的发生。如申请号为CN201811460352.X的发明公开了一种电动汽车坡道驻坡、起步控制方法:
坡道驻坡为:1.1、MCU根据VCU发送的挡位信息、扭矩指令、驱动电机的转速控制驱动电机自动进入驻坡状态;1.2、EPB控制器接收判断MCU驻坡状态持续时间和电机温度过温预警信息;当MCU驻坡状态持续10s,EPB控制器控制EPB电机动作;当MCU进入驻坡状态并报出电机温度过温预警,EPB控制器控制EPB电机动作;1.3、MCU接收到EPB控制器动作完成状态后,逐步卸载驱动电机扭矩;
坡道起步防溜坡为:2.1、VCU判断行驶操作为爬坡时发送扭矩指令给MCU;2.2、MCU根据VCU指令执行扭矩输出;2.3、当执行扭矩大于EPB控制器中记录的加紧扭矩时,控制EPB电机解锁。
而上述技术存在以下缺点:
当车辆爬坡起步时,无法精准提供相应的扭矩使车辆能够稳定的起步,可能造成资源浪费。
发明内容
为此,需要提供一种电动汽车防溜坡的控制方法、存储介质及电动汽车,解决车辆爬坡起步时,无法精准提供相应的扭矩使车辆能够稳定的起步,可能造成资源浪费。
为实现上述目的,发明人提供了一种电动汽车防溜坡的控制方法,包括以下步骤:
当检测到电动汽车爬坡起步时,整车控制器通过坡度传感器采集路面的坡度信息;
将采集的路面的坡度信息与第一预设坡度进行比对;
当采集的路面的坡度信息小于第一预设坡度时,则正常控制车辆低速蠕动行驶;
当采集的路面的坡度信息大于第一预设坡度时,则根据预设的不同坡度对应的扭矩修正系数,控制电机输出更高的扭矩控制车辆低速蠕动行驶。
进一步优化,还包括以下步骤:
当检测到电动汽车爬坡时,整车控制器检测电机转速方向,并判断电机转速方向是否与车辆意图驱动方向一致;
若不一致,则引入PI调节控制,请求电机控制器MCU控制电机输出更大的扭矩控制车辆按照车辆意图驱动方向驱动。
进一步优化,还包括以下步骤:
当检测到电动汽车行驶过程中时,整车控制器通过坡度传感器采集路面的坡度信息;
当采集的路面的坡度信息大于第二预设坡度时,实时采集车辆的挡位信息、刹车信息及坡度信息;
根据采集的采集车辆的挡位信息、刹车信息及坡度信息判断车辆是否为爬坡工况;
若为爬坡工况,实时确定车辆的当前状态;
当车辆的当前车速为0、油门开度为0及刹车踩下时,则整车控制器请求EPB控制电机动作,并自动拉起手刹驻车。
进一步优化,所述步骤“自动拉起手刹驻车”之后还包括以下步骤:
当整车控制器识别到油门开度信号后,并检测到当前车辆的挡位信息并非空挡时,通过EPB解锁车辆电机。
进一步优化,所述步骤“当整车控制器识别到油门开度信号后,并检测到当前车辆的挡位信息并非空挡时,通过EPB解锁车辆电机”具体包括以下步骤:
当整车控制器通过EPB识别到油门开度信号后,并检测到当前车辆的挡位信息并非空挡时,判断车辆当前的油门开度是否大于预设开度值;
若大于预设开度值,则通过EPB解锁车辆电机。
还提供了另一个技术方案:一种整车控制器,包括存储介质,所述存储介质内存储有计算机程序,所述计算机程序被整车控制器运行时执行上述所述电动汽车防溜坡的控制方法。
还提供了另一个技术方案:一种电动汽车,所述电动汽车包括如上述所述整车控制器。
区别于现有技术,上述技术方案,当检测到电动汽车爬坡起步时,整车控制器通过坡度传感器进行采集路面的坡度信息;并将采集的坡度信息与第一预设坡度进行比对,当小于第一预设坡度时,则根据油门的开合度进行输出相应的扭矩控制车辆进行低速蠕动行驶,而当大于第一预设坡度时,则根据预设的不同坡度对应的扭矩修正系数,对油门开度对应的输出扭矩进行相应的修正,使得输出更高的扭矩控制车辆以低速蠕动行驶,可以精准为车辆提供相应的扭矩,使得电动汽车可以稳定起步,避免出现溜坡行为,以及避免资源的浪费。
附图说明
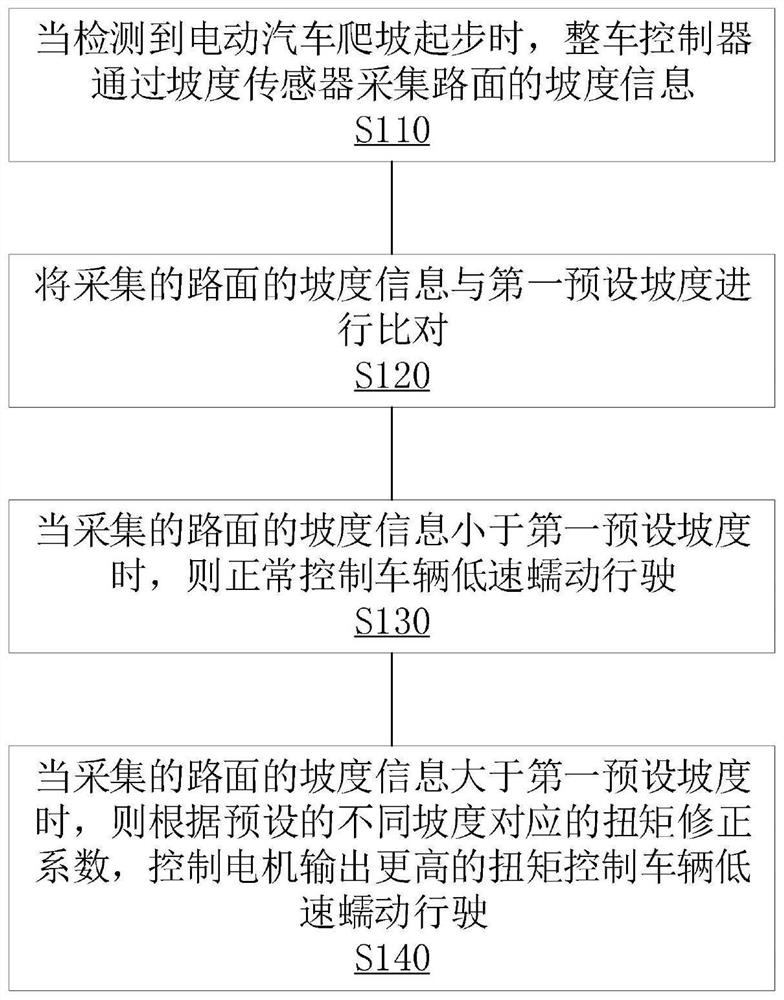
图1为具体实施方式所述电动汽车防溜坡的控制方法的一种流程示意图。
具体实施方式
为详细说明技术方案的技术内容、构造特征、所实现目的及效果,以下结合具体实施例并配合附图详予说明。
请参阅图1,本实施例提供了一种电动汽车防溜坡的控制方法,包括以下步骤:
步骤S110:当检测到电动汽车爬坡起步时,整车控制器通过坡度传感器采集路面的坡度信息;其中,当电动汽车接收到点火信息后,通过坡度传感器检测到的坡度信息大于0以及检测到油门开度信号后,则判断电动汽车准备爬坡起步,整车控制器VCU通过总线接收EPB内置的坡度传感器采集的坡度信息。
步骤S120:将采集的路面的坡度信息与第一预设坡度进行比对;
当采集的路面的坡度信息小于第一预设坡度时,则执行步骤S130:正常控制车辆低速蠕动行驶;当判断采集的路面坡度信息小于第一预设坡度时,表示车辆根据油门的开度值对应的扭矩进行起步,不易造成溜坡,则根据油门的开合度进行输出相应的扭矩控制车辆进行低速蠕动行驶。其中,低速蠕动车速通常设置为7KM/h,也可以根据实际需要设置相应的低速蠕动车速。
当采集的路面的坡度信息大于第一预设坡度时,则执行步骤S140:根据预设的不同坡度对应的扭矩修正系数,控制电机输出更高的扭矩控制车辆低速蠕动行驶。根据汽车动力学,不同坡度下,整车要维持不后溜所需的驱动力不同,根据不同的坡度引入不同的修正系数来控制在不同坡度时输出不同驱动力。
当检测到电动汽车爬坡起步时,整车控制器通过坡度传感器进行采集路面的坡度信息;并将采集的坡度信息与第一预设坡度进行比对,当小于第一预设坡度时,则根据油门的开合度进行输出相应的扭矩控制车辆进行低速蠕动行驶,而当大于第一预设坡度时,则根据预设的不同坡度对应的扭矩修正系数,对油门开度对应的输出扭矩进行相应的修正,使得输出更高的扭矩控制车辆以低速蠕动行驶,可以精准为车辆提供相应的扭矩,使得电动汽车可以稳定起步,避免出现溜坡行为,以及避免资源的浪费,同时通过分坡度进行防溜坡控制,控制更精细可靠。
在本实施例中,为了避免汽车在爬坡过程中出现溜坡现象,还包括以下步骤:
当检测到电动汽车爬坡时,整车控制器检测电机转速方向,并判断电机转速方向是否与车辆意图驱动方向一致;
若不一致,则引入PI调节控制,请求电机控制器MCU控制电机输出更大的扭矩控制车辆按照车辆意图驱动方向驱动。
当通过检测到路面的坡度信息大于零已经车速大于零时,则表示电动汽车为爬坡状态,整车控制器实时检测电动汽车的电机转速方向,并判断电机转速方向是否与车辆意图驱动方向一致,当不一致的时候,则引入PI调节控制,请求电机控制器MCU控制电机输出更大的扭矩控制车辆按照车辆意图驱动方向驱动,避免了电动汽车在爬坡行驶过程中出现溜坡现象,同时整车控制器一直监控电机输出扭矩值,使得电机输出的扭矩安全可控。其中,电机的转速方向为正时,表示车辆正在前进,转速方向为负时,表示车辆正在后退;当电机的转速方向为正时以及车辆的挡位为前进挡时,或者转速方向为负以及车辆的挡位为后退挡时,则表示电机转速方向与车辆意图驱动方向一致;当电机的转速方向为正时以及车辆的挡位为后退挡时,或者转速方向为负以及车辆的挡位为前进挡时,则表示电机转速方向与车辆意图驱动方向不一致。
在本实施例中,为了避免电动汽车在大坡度的情况下进行驻车时容易出现溜坡现象还包括以下步骤:
当检测到电动汽车行驶过程中时,整车控制器通过坡度传感器采集路面的坡度信息;
当采集的路面的坡度信息大于第二预设坡度时,实时采集车辆的挡位信息、刹车信息及坡度信息;
根据采集的采集车辆的挡位信息、刹车信息及坡度信息判断车辆是否为爬坡工况;
若为爬坡工况,实时确定车辆的当前状态;
当车辆的当前车速为0、油门开度为0及刹车踩下时,则整车控制器请求EPB控制电机动作,并自动拉起手刹驻车。
当检测到电动汽车在行驶时,实时监控车辆的运动状态,整车控制器通过坡度传感器采集路面的坡度信息,当坡度大于第二预设值时,其中第二预设值大于第一预设值,则表示车辆处于大坡度行驶,则实时采集车辆的挡位信息、刹车信息及坡度信息,并判断车辆是否为爬坡工况,如,采集的坡度信息为正时,表示车子的车头处于上坡,此次挡位挂到前进挡时,则表示车辆处于爬坡工况,而如果采集的坡度信息为正时,而挡位挂在后退档时,则表示车辆处于非爬坡工况;而采集的坡度信息为负时,表示车子的车头处于下坡,此次挡位挂到后退挡时,则表示车辆处于爬坡工况,而如果采集的坡度信息为负时,而挡位挂在前进挡时,则表示车辆处于非爬坡工况,而当车辆处于爬坡工况时,则实时判断车辆的当前状态,当车辆的当前车速为0、油门开度为0及刹车踩下时,则整车控制器请求EPB控制电机动作,并自动拉起手刹驻车,完成车辆自动驻车,驾驶员可以松开刹车,节省大坡度下的驻车电耗,提高整车经济性。而当驾驶员开始下次行驶时,所述步骤“自动拉起手刹驻车”之后还包括以下步骤:
当整车控制器识别到油门开度信号后,并检测到当前车辆的挡位信息并非空挡时,通过EPB解锁车辆电机。
当整车控制器通过油门传感器识别到油门开度信号后,及检测到当前车辆的挡位信息并非空挡时,则表示汽车要启动,则进行自动解锁,使得车辆可以起步,其中,所述步骤“当整车控制器识别到油门开度信号后,并检测到当前车辆的挡位信息并非空挡时,通过EPB解锁车辆电机”具体包括以下步骤:
当整车控制器识别到油门开度信号后,并检测到当前车辆的挡位信息并非空挡时,判断车辆当前的油门开度是否大于预设开度值;
若大于预设开度值,则通过EPB解锁车辆电机。
当油门开度大于预设开度值时,则解锁车辆电机,可以进一步避免车辆起步时由于动力不足而造成溜坡的现象。
另一个实施例中,一种整车控制器,包括存储介质,所述存储介质内存储有计算机程序,所述计算机程序被整车控制器运行时执行上述所述电动汽车防溜坡的控制方法。
当检测到电动汽车爬坡起步时,整车控制器通过坡度传感器进行采集路面的坡度信息;并将采集的坡度信息与第一预设坡度进行比对,当小于第一预设坡度时,则根据油门的开合度进行输出相应的扭矩控制车辆进行低速蠕动行驶,而当大于第一预设坡度时,则根据预设的不同坡度对应的扭矩修正系数,对油门开度对应的输出扭矩进行相应的修正,使得输出更高的扭矩控制车辆以低速蠕动行驶,可以精准为车辆提供相应的扭矩,使得电动汽车可以稳定起步,避免出现溜坡行为,以及避免资源的浪费,同时通过分坡度进行防溜坡控制,控制更精细可靠。
另一个实施例中,一种电动汽车,所述电动汽车包括如上述所述整车控制器。
当检测到电动汽车爬坡起步时,整车控制器通过坡度传感器进行采集路面的坡度信息;并将采集的坡度信息与第一预设坡度进行比对,当小于第一预设坡度时,则根据油门的开合度进行输出相应的扭矩控制车辆进行低速蠕动行驶,而当大于第一预设坡度时,则根据预设的不同坡度对应的扭矩修正系数,对油门开度对应的输出扭矩进行相应的修正,使得输出更高的扭矩控制车辆以低速蠕动行驶,可以精准为车辆提供相应的扭矩,使得电动汽车可以稳定起步,避免出现溜坡行为,以及避免资源的浪费,同时通过分坡度进行防溜坡控制,控制更精细可靠。
需要说明的是,尽管在本文中已经对上述各实施例进行了描述,但并非因此限制本发明的专利保护范围。因此,基于本发明的创新理念,对本文所述实施例进行的变更和修改,或利用本发明说明书及附图内容所作的等效结构或等效流程变换,直接或间接地将以上技术方案运用在其他相关的技术领域,均包括在本发明的专利保护范围之内。
- 一种电动汽车防溜坡的控制方法、整车控制器及电动汽车
- 一种基于电机控制器的电动汽车防溜坡控制方法和系统