星载激光通信方法
文献发布时间:2023-06-19 12:00:51
技术领域
本发明涉及卫星通信技术领域,尤其涉及一种星载激光通信方法。
背景技术
相干探测在接收灵敏度上存在优势,对于空间远距离通信链路这样的弱信号强度探测,相干探测比直接探测的激光通信体制在通信速率和探测灵敏度上获得较大提升。为了进一步提高探测灵敏度,目前主要采用分集接收技术在接收端使用多个光学天线接收光信号,当各支路接收信号相互独立时,将其适当合并,可以有效改善信道对空间通信系统性能的影响。
传统的星载相干激光通信分集技术为一发多收,在接收端采用分集接收技术。下面以一发四收BPSK调制为例进行说明其他一发多收和其他调制方式的情况可进行同样推导。在这种分集技术下,每一个接收支路接收到的光场表达式如公式(1)所示:
其中,
其中,R为光电探测器的响应系数。噪声经过合并后为
单路信噪比如公式(4)所示:
当各路噪声相同时获得最大合并增益,SNR
发明内容
针对传统的星载相干激光通信分集技术采用一发多收来提高接收信噪比,在星载激光通信场景中,由于载荷尺寸和重量的增加会造成卫星成本和制作难度的增加,根据本发明的一个方面,提供一种基于MIMO的星载激光通信方法,包括:
空时编码器对多个激光器发送信息序列进行空时分组编码;
信道估计器估计出信道振幅和相位特征;
合并器按照空时分组码对接收信号进行最大比合并,得到N×M合并增益,以在降低单个卫星携带载荷的尺寸和重量的情况下实现一发N×M收相干激光通信系统同样的合并增益,且保留相干通信体制。
可选的,在所述的星载激光通信方法中,还包括:
使纠错编码器的前端与发射端上位机相连;
使空时编码器的前端与所述纠错编码器的后端相连;
使相位调制器的前端与所述空时编码器的后端相连;
使激光器的前端与所述相位调制器的后端相连;
使望远镜接收来自所述激光器的入射光;
使干涉滤光片的前端与所述望远镜的后端相连;
使分光片将来自所述干涉滤光片的入射光分成两路;
使信道估计器接收一路来自分光片的入射光;
使合并器接收另一路来自分光片的入射光,且使所述信道估计器的后端与所述合并器的前端相连;
使本振激光器与所述合并器的前端相连;
使光电探测器的前端与所述合并器的后端相连;
使解调器的前端与所述光电探测器的后端相连;
使纠错译码器的前端与所述解调器的后端相连;以及
使接收端上位机与所述纠错编码器的后端相连。
可选的,在所述的星载激光通信方法中,所述空时编码器对M个激光器发送信息序列进行空时分组编码,其中M≥2;
所述相位调制器按照所述空时编码器产生的编码序列对所述激光器阵列进行空时编码调制。
可选的,在所述的星载激光通信方法中,所述信道估计器由光纤耦合器、平衡探测器以及本振激光器构成,其中:
所述本振激光器的输出端与所述光纤耦合器的前端相连;
所述光纤耦合器的后端与所述平衡探测器的输入端相连;
所述平衡探测器的输出端与所述本振激光器相连,以及
所述平衡探测器的输出端作为所述信道估计器的输出端。
可选的,在所述的星载激光通信方法中,所述合并器由相位调制器和光纤耦合器构成,其中:
入射光场进入到所述相位调制器的前端;
所述信道估计器的后端与所述相位调制器的前端相连,基于估计出的信道参数调制所述相位调制器;
所述相位调制器的输出端与所述本振激光器的输出端共同接入所述光纤耦合器的输入端;以及
所述光纤耦合器的输出端与所述合并器的输出端相连。
可选的,在所述的星载激光通信方法中,还包括:
发射端发送信道估计序列,该估计序列为发射端与接收端共享的已知序列F
2个光学接收天线接收信道估计序列,产生信道估计h
发射端上位机的信息序列d
空时编码器对纠错编码信息序列c
可选的,在所述的星载激光通信方法中,还包括:
调制器按照空时编码后的信息序列s
2个光信号经过信道后到达2个光学接收天线,信道对0号发射天线到0号接收天线的影响记为
将0号光学天线在t时刻和t+T时刻接收到的光场记为r
四个接收光场的表达式为:
r
r
其中n
可选的,在所述的星载激光通信方法中,还包括:
将接收到的光场r
将式(5)代入式(6)可得:
可选的,在所述的星载激光通信方法中,还包括:
经过最大比合并后的光场
其中,R为光电探测器的响应系数;噪声经过合并后为:
对于BPSK调制而言,合并后信噪比为:
当各路噪声相同时,SNR
可选的,在所述的星载激光通信方法中,还包括:
解调器对光电流信号Im进行解调,将解调后的信息送入纠错译码器;
纠错译码器对解调器送入的信息进行纠错译码,将译码后的信息传送给接收端上位机,完成通信。
本发明提供一种基于MIMO的星载激光通信方法,该系统依次由发射端上位机、纠错编码器、空时编码器、相位调制器、激光器、望远镜、干涉滤光片、分光片、信道估计器、本振激光器、合并器、光电探测器、解调器,纠错译码器、接收端上位机构成。本发明提供的该种基于MIMO的星载相干激光通信分集系统的空时编码器对多个激光器发送信息序列进行空时分组编码,信道估计器由光纤耦合器、平衡探测器构成,可以估计出信道振幅和相位特征,合并器由相位调制器和光耦合器构成,可以按照空时分组码对接收信号进行最大比合并。本发明提供的该种基于MIMO的星载相干激光通信分集系统,可以得到N×M合并增益。在降低单个卫星携带载荷的尺寸和重量的情况下实现一发N×M收相干激光通信系统同样的合并增益,且保留相干通信体制。
附图说明
为了进一步阐明本发明的各实施例的以上和其它优点和特征,将参考附图来呈现本发明的各实施例的更具体的描述。可以理解,这些附图只描绘本发明的典型实施例,因此将不被认为是对其范围的限制。在附图中,为了清楚明了,相同或相应的部件将用相同或类似的标记表示。
图1示出根据本发明的一个实施例形成的一种基于MIMO的星载相干激光通信分集系统示意图;
图2示出根据本发明的一个实施例形成的该种基于MIMO的星载相干激光通信分集系统的信道估计器示意图;
图3示出根据本发明的一个实施例形成的该种基于MIMO的星载相干激光通信分集系统的合并器示意图。
具体实施方式
在以下的描述中,参考各实施例对本发明进行描述。然而,本领域的技术人员将认识到可在没有一个或多个特定细节的情况下或者与其它替换和/或附加方法、材料或组件一起实施各实施例。在其它情形中,未示出或未详细描述公知的结构、材料或操作以免使本发明的各实施例的诸方面晦涩。类似地,为了解释的目的,阐述了特定数量、材料和配置,以便提供对本发明的实施例的全面理解。然而,本发明可在没有特定细节的情况下实施。此外,应理解附图中示出的各实施例是说明性表示且不一定按比例绘制。
在本说明书中,对“一个实施例”或“该实施例”的引用意味着结合该实施例描述的特定特征、结构或特性被包括在本发明的至少一个实施例中。在本说明书各处中出现的短语“在一个实施例中”并不一定全部指代同一实施例。
需要说明的是,本发明的实施例以特定顺序对方法步骤进行描述,然而这只是为了方便区分各步骤,而并不是限定各步骤的先后顺序,在本发明的不同实施例中,可根据方法的调节来调整各步骤的先后顺序。
本发明提供一种基于MIMO的星载相干激光通信分集系统,该系统依次由发射端上位机、纠错编码器、空时编码器、相位调制器、激光器、望远镜、干涉滤光片、分光片、信道估计器、本振激光器、合并器、光电探测器、解调器,纠错译码器、接收端上位机构成。本发明提供的该种基于MIMO的星载相干激光通信分集系统的空时编码器对多个激光器发送信息序列进行空时分组编码,信道估计器由光纤耦合器、平衡探测器构成,可以估计出信道振幅和相位特征,合并器由相位调制器和光耦合器构成,可以按照空时分组码对接收信号进行最大比合并。本发明提供的该种基于MIMO的星载相干激光通信分集系统,发射激光器数量为M,接收机数量为N,可以得到N×M合并增益。在降低单个卫星携带载荷的尺寸和重量的情况下实现一发N×M收相干激光通信系统同样的合并增益,且保留相干通信体制。
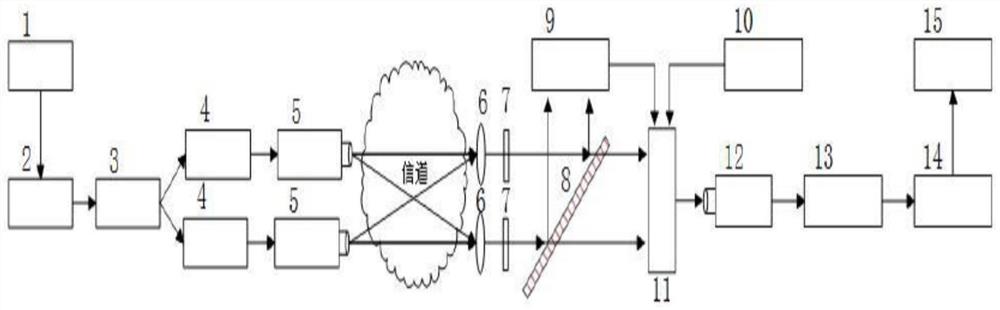
下面结合图1来详细介绍根据本发明的一个实施例的一种基于MIMO的星载相干激光通信分集系统。图1示出根据本发明的一个实施例形成的一种基于MIMO的星载相干激光通信分集系统示意图,如图1所示,该基于MIMO的星载相干激光通信分集系统进一步由发射端上位机1、纠错编码器2、空时编码器3、相位调制器4、激光器5、望远镜6、干涉滤光片7、分光片8、信道估计器9、本振激光器10、合并器11、光电探测器12、解调器13、纠错译码器14以及接收端上位机15构成。
其中,发射端上位机1与纠错编码器2的前端相连;纠错编码器2的后端与空时编码器3的前端相连;空时编码器3的后端与相位调制器4的前端相连;相位调制器4的后端与激光器5的前端相连。
接收端沿入射光方向依次是望远镜6,干涉滤光7、分光片8,分光片8;将光路分成两路,一路入射进信道估计器9,另一路入射进合并器11;信道估计器9的后端与合并器11的前端相连;本振激光器10与合并器11的前端相连;合并器11的后端与光电探测器12相连;光电探测器12的后端与解调器13的前端相连;解调器13的后端与纠错译码器14的前端相连;纠错编码器14的后端与接收端上位机15相连。
在本发明的一个具体实施例中,发射端上位机1的型号为HP100010cI,厂商为HP公司;纠错编码器2的型号为XC6SLX162CSG324I,厂商为Xilinx公司;空时编码器3的型号为TMS320C6415,厂商为TexasInstrument公司;相位调制器4的型号为LN27SFC,厂商为Thorlabs公司;激光器5的型号为SFL1550P,厂商为Thorlabs公司;望远镜6的型号为NBK7LA1238,厂商为Thorlabs公司;干涉滤光片7的型号为FL05155040,厂商为Thorlabs公司;分光片8的型号为BSW18,厂商为Thorlabs公司;本振激光器10的型号为SFL1550P,厂商为Thorlabs公司;光电探测器12的型号为9102B,厂商为ETenterprise公司;解调器13的型号为XC6SLX162CSG324I,厂商为Xilinx公司;纠错译码器14的型号为XC6SLX162CSG324I,厂商为Xilinx公司;接收端上位机15的型号为HP100010cI,厂商为HP公司。
下面结合图2来介绍本发明的一个实施例形成的该种基于MIMO的星载相干激光通信分集系统的信道估计器9。图2示出根据本发明的一个实施例形成的该种基于MIMO的星载相干激光通信分集系统的信道估计器示意图,如图2所示,该信道估计器9由光纤耦合器16、平衡探测器17以及本振激光器10构成。本振激光器10的输出端与光纤耦合器16的前端相连,光纤耦合器16的后端与平衡探测器17的输入端相连,平衡探测器17的输出端与本振激光器10相连,同时作为信道估计器9的输出端。
在本发明的一个具体实施例中,该信道估计器9中的光纤耦合器16的型号为PNQ1550HF,厂商为Thorlabs公司;平衡探测器17的型号为PDB210C,厂商为Thorlabs公司;本振激光器10的型号为SFL1550P,厂商为Thorlabs公司。
下面结合图3来介绍本发明的一个实施例形成的该种基于MIMO的星载相干激光通信分集系统的合并器11。图3示出根据本发明的一个实施例形成的该种基于MIMO的星载相干激光通信分集系统的合并器示意图,如图3所示,该合并器11由相位调制器18和光纤耦合器19构成。入射光场进入到相位调制器18的前端,信道估计器9与相位调制器18的前端相连,用估计出的信道参数调制相位调制器18;相位调制器18的输出端与本振激光器10的输出端共同接入光纤耦合器19的输入端;光纤耦合器19的输出端与合并器11的输出端相连。
在本发明的一个实施例中,相位调制器18的型号为LN27SFC,厂商为Thorlabs公司;光纤耦合器19的型号为PNQ1550HF,厂商为Thorlabs公司。
本发明的该种基于MIMO的星载相干激光通信分集系统的工作过程如下:
(1)发射端发送信道估计序列,该估计序列为发射端与接收端共享的已知序列F
(2)2个光学接收天线接收信道估计序列,产生信道估计h
(3)发射端上位机的信息序列d
(4)空时编码器对纠错编码信息序列c
表1空时编码发送序列
(5)调制器按照空时编码后的信息序列s
(6)2个光信号经过信道后到达2个光学接收天线,信道对0号发射天线到0号接收天线的影响记为
表2 2×2系统信道影响
(7)将0号光学天线在t时刻和t+T时刻接收到的光场记为r
表3 2×2系统不同时刻接收信号
四个接收光场的表达式为:
r
r
其中n
(8)将接收到的光场r
将式(5)代入式(6)可得:
(9)经过最大比合并后的光场
其中,R为光电探测器的响应系数。噪声经过合并后为:
对于BPSK调制而言,合并后信噪比为:
当各路噪声相同时,SNR
(10)解调器对光电流信号Im进行解调,将解调后的信息送入纠错译码器;
(11)纠错译码器对解调器送入的信息进行纠错译码,将译码后的信息传送给接收端上位机,完成通信。
基于本发明提供的该种基于MIMO的星载相干激光通信分集系统,该系统依次由发射端上位机、纠错编码器、空时编码器、相位调制器、激光器、望远镜、干涉滤光片、分光片、信道估计器、本振激光器、合并器、光电探测器、解调器,纠错译码器、接收端上位机构成。本发明提供的该种基于MIMO的星载相干激光通信分集系统的空时编码器对多个激光器发送信息序列进行空时分组编码,信道估计器由光纤耦合器、平衡探测器构成,可以估计出信道振幅和相位特征,合并器由相位调制器和光耦合器构成,可以按照空时分组码对接收信号进行最大比合并。本发明提供的该种基于MIMO的星载相干激光通信分集系统,可以得到N×M合并增益。在降低单个卫星携带载荷的尺寸和重量的情况下实现一发N×M收相干激光通信系统同样的合并增益,且保留相干通信体制。
尽管上文描述了本发明的各实施例,但是,应该理解,它们只是作为示例来呈现的,而不作为限制。对于相关领域的技术人员显而易见的是,可以对其做出各种组合、变型和改变而不背离本发明的精神和范围。因此,此处所公开的本发明的宽度和范围不应被上述所公开的示例性实施例所限制,而应当仅根据所附权利要求书及其等同替换来定义。
- 星载激光通信方法
- 一种星载激光近海岸地形探测激光雷达及探测方法