信息处理设备、信息处理方法和信息处理系统
文献发布时间:2023-06-19 12:00:51
技术领域
本发明涉及一种信息处理设备、信息处理方法和信息处理系统,其每一个都能够在移动体内部的显示器上显示移动体外部的图像。
背景技术
在现有技术中,已经提出将虚拟图像投影在公共汽车等的窗户上(例如,参见日本未审查专利申请公开第2008-108246号)。
发明内容
从车辆内部看到的车辆外部风景是真实世界,并且由地点和时间确定。通常,乘车旅行的人只是前往目的地,并且在旅行期间很少受到车外风景的刺激。因此,本发明旨在使得诸如汽车的移动体内部的人能够根据移动体的外部适当地受到刺激。
本发明的实施例的一个方案是通过包括控制单元的信息处理设备来实现的。控制单元获取要在移动体的内壁表面上的窗形显示器上显示的移动体的外部的视频,并且在获取的视频上叠加与移动体的位置相对应的图像以显示在窗形显示器上。本发明的实施例的另一方案是通过至少一台诸如信息处理设备的计算机执行的信息处理方法来实现的。本发明实施例的又一方案是通过一种包括该信息处理设备和信息发送装置的信息处理系统来实现的。
利用信息处理设备,可以根据移动体的外部适当地刺激移动体中的人。
附图说明
以下将参考附图描述本发明的示例性实施例的特征、优点以及技术和工业意义,其中,相同的附图标记表示相同的元件,并且其中:
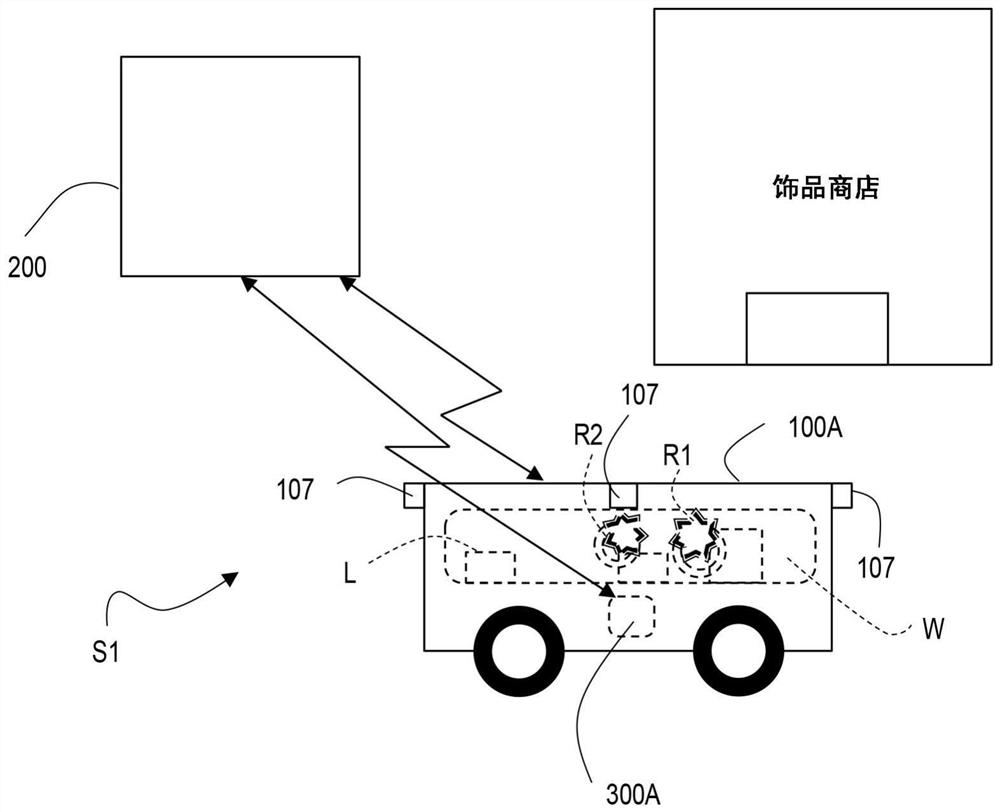
图1是根据本发明的第一实施例的视频显示系统的概念图;
图2是示意性地示出图1的系统的配置,特别示出了自主车辆的配置的框图;
图3是示意性地示出图1的系统的配置,特别示出了服务器装置的配置的框图;
图4是示意性地示出图1的系统的配置,特别示出了用户装置的配置的框图;
图5是图1的系统中从服务器装置到自主车辆的图像提供处理的流程图;
图6是图1的系统中的自主车辆中的图像显示处理的流程图;
图7是根据本发明的第二实施例的视频显示系统的概念图;并且
图8是图7的系统中的自主车辆中的图像显示处理的流程图。
具体实施方式
在下文中,将参考附图描述根据本发明实施例的信息处理设备、信息处理设备中的信息处理方法以及程序。
图1概念性地示出了根据本发明的第一实施例的视频显示系统S1(也简称为系统S1)。系统S1包括自主车辆100(100A、...)和服务器装置200。系统S1还包括用户装置300(300A、...)。
自主车辆100是被配置为提供由系统S1操作的视频显示服务的移动体的一个示例。服务器装置200是信息处理设备并且是网络N上的计算机。服务器装置200被配置为经由网络N与每个自主车辆100通信,并且经由网络N与自主车辆100的信息处理设备102协作。图1示出了多个自主车辆100(100A、...)之中的自主车辆100A。自主车辆100的数量不受限制,并且可以是任何数量。
服务器装置200可以经由网络N与其他服务器装置通信。服务器装置200被配置为经由网络N与每个自主车辆100通信,并且还经由网络N与每个用户装置300通信。
用户装置300被配置为经由网络N与服务器装置200通信。此外,用户装置300被配置为经由网络N与自主车辆100通信。在图1中,示出了多个用户装置300(300A、...)之中的用户装置300A。用户装置的数量不受限制,并且可以是任何数量。
自主车辆100也被称为电动车辆(EV)托板。自主车辆100是能够自动驾驶和无人驾驶并且具有各种尺寸的移动体。例如,可以使用各种尺寸的自主车辆100,例如,从仅一个人可以搭乘的小型车辆到数十人可以搭乘的大型车辆的范围。
自主车辆100具有用于控制自身的控制功能和通信功能。自主车辆除了可以通过与网络N上的服务器装置协作而单独由自主车辆100执行的处理之外,自主车辆100还可以向用户提供由网络N上的服务器装置附加的功能和服务。另外,自主车辆100不一定是无人驾驶车辆。例如,销售人员、服务人员或安保人员可以搭乘车辆。例如,当由自主车辆100提供的服务是饮食服务时,厨师或服务员可以搭乘车辆,而当由自主车辆100提供的服务是幼儿保育服务时,幼儿园教师可以搭乘车辆。此外,自主车辆100可以不一定是能够进行完全的自动行驶的车辆。例如,根据情况,可以是其中有人驾驶或辅助驾驶的车辆。在第一实施例中,将自主车辆100用作移动体。但是,系统S1中的移动体可能包括无法自动行驶的车辆,即需要驾驶员操作的车辆。在第一实施例中,自主车辆100A被配置成使得当激活预定的安全装置时,禁止自动行驶并且仅驾驶员可以驾驶车辆。
如上所述,自主车辆100被配置为经由网络N与用户装置300(300A、...)通信。用户装置300接受来自用户的输入和与这样的输入等效的操作,不仅可以经由网络N与服务器装置200通信,还可以经由网络N与自主车辆100通信。
在此,服务器装置200主要是向自主车辆100发出服务命令的装置。例如,服务器装置200向自主车辆100发送包括关于想要搭乘车辆的人(例如想要服务的用户)何时何地搭乘车辆和从该车辆下车的行驶计划的服务命令。
下面将详细描述图1的系统S1中的各个组件。图2是示意性地示出包括自主车辆100、服务器装置200和用户装置300的系统S1的配置的框图,特别是示出自主车辆100A的配置的图。在图2中,示出了自主车辆100A的配置作为自主车辆100的一个示例。其他自主车辆100(100B、...)等具有与自主车辆100A相同的配置。
图2中的自主车辆100A设置有信息处理设备102,并且包括基本执行其功能的控制单元104。自主车辆100A可以基于从服务器装置200获取的服务命令来行驶。特别地,自主车辆100A在检测车辆的周围环境的同时,基于经由网络N获取的服务命令以适当的方式行驶。自主车辆100A可以在行驶时向各种用户提供各种服务。
自主车辆100A还包括传感器106、位置信息获取单元108、驱动单元110、通信单元112和存储单元114。自主车辆100A利用从电池供应的电力进行操作。
传感器106是检测车辆的周围环境的单元。传感器106通常包括立体照相机、激光扫描仪、LIDAR(光检测和测距,或激光成像检测和测距)、雷达等。由传感器106获取的信息被发送到控制单元104。传感器106包括使本车辆能够执行自动行驶的传感器。传感器106还包括设置在自主车辆100A的车身上的照相机107。例如,照相机107可以是使用图像传感器的图像拍摄装置,诸如电荷耦合装置(CCD)、金属氧化物半导体(MOS)或互补金属氧化物半导体(CMOS)。代替来自照相机107的图像,可以使用来自车载图像记录装置的图像。在本实施例中,在车身上的多个点设置有多个照相机107。具体地,如图1所示,照相机107可以分别安装在车身的前侧、后侧、左侧和右侧。可能存在仅使用设置在车身上的一个照相机107(例如能够拍摄360度的照相机)的情况。
位置信息获取单元108是获取车辆的当前位置的单元,其通常包括全球定位系统(GPS)。由位置信息获取单元108获取的信息被发送到控制单元104。GPS接收器作为卫星信号接收器从多个GPS卫星接收信号。每个GPS卫星都是绕地球轨道运行的人造卫星。卫星导航系统(即导航卫星系统(NSS))不限于GPS。可以基于来自各种卫星导航系统的信号来检测位置信息。NSS不仅限于全球导航卫星系统,还可以包括准天顶卫星系统,例如与GPS集成在一起的欧洲的“伽利略(Galileo)”或日本的“准天顶(Michibiki)”。
控制单元104是基于从传感器106、位置信息获取单元108等获取的信息来控制自主车辆100A的计算机。控制单元104是控制单元的一个示例,该控制单元从服务器装置200接收服务命令并且控制自主车辆100A(移动体)的行驶以及各种用户的乘车/下车。
控制单元104包括CPU和主存储单元,并且通过程序执行信息处理。CPU也称为处理器。控制单元104的主存储单元是主存储装置的一个示例。控制单元104中的CPU执行部署在主存储单元中以便可执行的计算机程序,并提供各种功能。控制单元104中的主存储单元存储由CPU执行的计算机程序和/或数据。控制单元104中的主存储单元是动态随机存取存储器(DRAM)、静态随机存取存储器(SRAM)、只读存储器(ROM)等。
控制单元104连接到存储单元114。存储单元114是所谓的外部存储单元,其用作辅助控制单元104的主存储单元的存储区域,并存储由控制单元104的CPU执行的计算机程序和/或数据。存储单元114是硬盘驱动器、固态驱动器(SSD)等。
控制单元104包括信息获取单元1041、计划生成单元1042、环境检测单元1043、任务控制单元1044、图像处理单元1045、视频接收单元1046和叠加处理单元1047作为功能模块。每个功能模块通过控制单元104(即CPU)执行存储在主存储单元和/或存储单元114中的程序来实现。
信息获取单元1041从服务器装置200获取例如服务命令的信息。服务命令可以包括关于希望使用由自主车辆100A提供的服务的用户或希望搭乘自主车辆100A的人的乘车位置(用户搭乘车辆的地方)、下车位置(用户从车辆下车的地方)、乘车时间和下车时间的信息。此外,服务命令可以包括这样的用户的用户信息(例如,用户ID或与该用户相关联的用户装置300的终端信息)。信息获取单元1041有定期地或不定期地获取关于本车辆的信息(例如,乘车状态),并且将这样的信息存储在存储单元114的本车辆信息数据库1141中。信息获取单元1041还从用户装置300获取信息。当自主车辆100A中的用户U的用户装置300是用户装置300A时,信息获取单元1041可以从用户装置300A获取对于用户装置300A唯一的用户ID。
计划生成单元1042基于从服务器装置200获取的服务命令,特别是基于该服务命令中包括的行驶计划的信息,来生成本车辆的服务计划。此外,由计划生成单元1042生成的服务计划被发送到下面将描述的任务控制单元1044。在本实施例中,服务计划是限定自主车辆100A行驶所沿的路线和自主车辆100A在该路线的一部分或全部上执行的处理的数据。服务计划中包含的数据示例可能包括以下内容。
(1)将本车辆行驶所沿的路线表示为道路链接的集合的数据
例如,可以参考存储在存储单元114中的地图数据,基于服务命令中包括的行驶计划的信息,基于给定的出发地和目的地,自动地生成本车辆行驶所沿的路线。可替代地,可以使用外部服务来生成路线。
(2)表示本车辆在路线上的某个地点要执行的处理的数据
本车辆在路线上要执行的处理例如是但不限于“用户乘车”、“用户下车”和“提供的服务”。
环境检测单元1043基于传感器106获取的数据来检测车辆周围的环境。检测目标包括例如但不限于车道的数量和位置、在本车辆附近的车辆的数量和位置、在本车辆附近的障碍物(行人、自行车、结构体、建筑物等)的数量和位置、道路结构和路标。可以使用任何检测目标,只要其对于自动行驶是必要的即可。此外,环境检测单元1043可以跟踪检测到的物体。例如,可以从在前一步检测到的物体的先前坐标与物体的当前坐标之间的差获得物体的相对速度。由环境检测单元1043检测到的与环境有关的数据(以下称为环境数据)被发送到任务控制单元1044。
任务控制单元1044基于计划生成单元1042生成的服务计划、环境检测单元1043生成的环境数据以及位置信息获取单元108获取的本车辆的位置信息,控制作为移动体的本车辆的操作(行驶)。例如,本车辆被引导沿着预定路线行驶,使得障碍物不进入以本车辆为中心的预定安全区域。作为使车辆自动行驶的方法,可以采用公知的方法。任务控制单元1044还基于计划生成单元1042生成的服务计划来执行除行驶之外的任务。任务的示例包括用户乘车和下车以及发出收据。
图像处理单元1045处理经由信息获取单元1041从例如服务器装置200获取的图像(即,图像数据)。图像处理单元1045将获取的图像数据存储在存储单元114的图像数据库1142中。所获取的图像数据与位置信息相关联并且被存储在图像数据库1142中,使得可以基于位置信息来搜索和提取图像数据。存储单元114可以预先存储多条图像数据。在这种情况下,图像处理单元1045可以基于从服务器装置200获取的关于图像的信息(例如,与位置相对应的图像的关联列表),将图像数据与位置信息相关联,使得它们一起被存储。关于图像的信息也可以存储在图像数据库1142中。图像数据库1142可以包括从服务器装置200获取的图像数据和先前存储在存储单元114中的图像数据。此外,在本实施例中,图像数据被存储在图像数据库1142中,使得可以根据用户的特征来搜索和提取图像数据。用户的特征可以包括例如性别、年龄、爱好和偏好。例如,当用户的特征包括类别“孩子”时,图像数据库1142被构造为使得可以提取落入类别“孩子”内的图像数据。
与自主车辆的位置相对应的图像或关于图像的信息(以下称为图像)可以与诸如商店的设施或诸如购物区、政府办公室或地方政府办公室的组织有关。
图像处理单元1045可以同时从服务器装置200获取与服务命令的行驶计划有关的图像,或者可以随着自主车辆100A移动而获取与位置信息相对应的图像。随着自主车辆100A移动,如下所述,服务器装置200可以从自主车辆100获取诸如自主车辆100的位置信息的信息,并将与该位置相对应的图像提供给自主车辆100。随着自主车辆100的移动而执行的提供图像的处理可以自动地执行或基于来自自主车辆100的请求命令来执行。因此,由于对应于自主车辆100A的位置的图像例如是随着自主车辆100A移动而获取的,可以减少用于在存储单元114中存储图像的存储容量。
视频接收单元1046获取要在自主车辆100A的内壁表面上的窗形显示器(以下称为显示器)W上显示的风景的视频。由照相机107拍摄的自主车辆100A外部的风景的视频实时地显示在显示器W上。在本实施例中不透明的显示器W设置在自主车辆100A的内壁表面上,以用作窗户。如果显示器W是窗户,则视频接收单元1046接收将在车辆中看到的风景的图像作为数据。显示器W是电子窗口,并且数字地显示例如视频或视频和图像的组合。显示器W可以被配置为向车辆的外部打开/关闭。在这种情况下,显示器W在关闭时可以气密地密封在车辆内部。
叠加处理单元1047执行以下处理:在由视频接收单元1046接收的视频上叠加与作为移动体的自主车辆100A的位置相对应的图像,并将其显示在显示器W上。例如,当自主车辆100A行驶在许多玩具商店所在的街道上时,可以在显示器W上显示的视频上重叠并显示用于为玩具做广告的图像。通过在窗形显示器W上的真实视频上显示与自主车辆100A的位置相对应的图像,可以介绍自主车辆100A正行驶所在的区域,或者可以为该区域内具有吸引力的产品或服务做广告。可以通过基于位置信息搜索图像数据库1142来提取叠加图像。然而,可以从服务器装置200直接获取叠加图像,并且将叠加图像叠加在显示器W的风景上。此外,当不满足用于在视频上叠加图像的预定条件时,叠加处理单元1047禁止在显示器W的视频上叠加与位置相对应的图像。此处,预定条件被定义为当预定的安全装置不运行时。然而,预定条件不限于此。例如,当自主车辆100A未进行自动行驶时,可以确定不满足用于在视频上叠加图像的预定条件。
驱动单元110是被配置为基于任务控制单元1044生成的命令允许自主车辆100A行驶的单元。驱动单元110的示例包括用于驱动车轮的电动机、逆变器、制动器、转向机构和二次电池。
通信单元112具有被配置为允许自主车辆100A访问网络N的通信单元。在本实施例中,自主车辆100A可以经由网络N与其他装置(例如,服务器装置200和用户装置300A)进行通信。通信单元112可以进一步包括用于在自主车辆100A(本车辆)和其他自主车辆100(100B、...)之间进行车辆间通信的通信单元。
接下来,将描述服务器装置200。服务器装置200是为多个自主车辆100中的每一个提供关于服务的信息(诸如关于各种服务命令的信息)的装置。
如图3所示,服务器装置200是信息处理设备,并且包括通信单元202、控制单元204和存储单元206。通信单元202与通信单元112相同,并且具有用于将服务器装置200连接到网络N的通信功能。服务器装置200的通信单元202是用于经由网络N与自主车辆100和用户装置300进行通信的通信接口。控制单元204包括CPU和主存储单元,并且类似于控制单元104,通过程序执行信息处理。该CPU也是处理器,并且控制单元204的主存储单元也是主存储装置的一个示例。控制单元204中的CPU执行部署在主存储单元中以便可执行的计算机程序,并提供各种功能。控制单元204中的主存储单元存储由CPU执行的计算机程序和/或数据。控制单元204中的主存储单元是DRAM、SRAM、ROM等。
控制单元204连接到存储单元206。存储单元206是外部存储单元,其用作辅助控制单元204的主存储单元的存储区域,并存储由控制单元204的CPU执行的计算机程序和/或数据。存储单元206是硬盘驱动器、SSD等。
控制单元204是被配置为控制服务器装置200的单元。如图3所示,控制单元204包括信息获取单元2041、车辆管理单元2042、图像管理单元2043和信息提供单元2044作为功能模块。这些功能模块中的每一个通过由控制单元204的CPU执行存储在主存储单元和/或存储单元206中的程序来实现。
信息获取单元2041从自主车辆100和用户装置300获取各种信息。所获取的信息可以被发送到例如车辆管理单元2042。此外,信息获取单元2041从自主车辆100周期性地获取位置信息、本车辆信息数据库1141的信息等,并且将这些信息发送给车辆管理单元2042。此外,信息获取单元2041获取与诸如各种商店的设施或组织有关的诸如图像数据的图像等,并将图像发送到图像管理单元2043。
车辆管理单元2042管理来自被管理的多个自主车辆100的信息。具体地,车辆管理单元2042经由信息获取单元2041从多个自主车辆100接收诸如与自主车辆100有关的数据的信息,并且以预定的间隔将该信息存储在存储单元206的车辆信息数据库2061中。位置信息和车辆信息被用作关于自主车辆100的信息。车辆信息的示例包括标识符、用途/类型、关于待机地点(车库或销售处)的信息、门的类型、自主车辆100的车身尺寸、行李厢尺寸、装载容量、充满电时可行驶的距离、当前可行驶的距离、当前状态等。但是,车辆信息不限于此。当前状态包括诸如用户乘车状态和提供的服务状态的信息。
图像管理单元2043将经由信息获取单元2041获取的图像等(例如,图像数据)存储在存储单元206的综合图像数据库2062中。存储所获取的图像数据,使得可以基于位置信息搜索图像数据。综合图像数据库2062和图像数据库1142可以相同,但是在本实施例中是不同的。这里,综合图像数据库2062存储管理区域(即,整个区域)的图像数据,但是在本实施例中,图像数据库1142仅存储该区域的一部分的图像数据。
信息提供单元2044根据预定程序向每个自主车辆100提供关于各种服务命令的信息。基于由信息获取单元2041获取的信息,生成与用户装置300相关联的用户何时搭乘自主车辆100的时间表,并且生成用于自主车辆100的服务命令。信息提供单元2044可以参考存储单元206中的地图信息数据库以生成服务命令。信息提供单元2044还针对每个自主车辆100从综合图像数据库2062提取适合于自主车辆100的图像,并将该图像发送到自主车辆100。所提供的图像与自主车辆100可以基于服务命令行驶的区域有关。图像被单独地或与关于自主车辆100的服务命令的信息一起提供给自主车辆100。
接下来,下面将描述用户装置300。用户装置300的示例包括移动终端、智能电话和个人计算机。作为示例,图4所示的用户装置300A具有通信单元302、控制单元304和存储单元306。用户装置300A的通信单元302和存储单元306分别与服务器装置200的通信单元202和存储单元206相同。此外,用户装置300A包括显示单元308和操作单元310。显示单元308可以例如是液晶显示器或电致发光面板。操作单元310的示例可以包括键盘和指示设备。更具体地,在本实施例中,操作单元310包括触摸面板,并且基本上与显示单元308集成在一起。
与服务器装置200的控制单元204相似,控制单元304包括CPU和主存储单元。控制单元304的CPU执行存储在存储单元306中的应用程序(以下称为应用)3061。应用3061是用于访问从网络浏览器或服务器装置200分发的信息的应用程序。应用3061具有GUI,接受用户的输入(例如,访问),并且经由网络N将该输入发送给自主车辆100或服务器装置200。用户可以经由用户装置300确认自主车辆100的服务时间表信息并输入用户希望使用的自主车辆100的服务。此输入从用户装置300A被发送到服务器装置200,但是可以被发送到自主车辆100。
此外,在图2、图3和图4中,自主车辆100、服务器装置200和用户装置300通过同一网络N连接。然而,该连接可以由多个网络实现。例如,将自主车辆100连接到服务器装置200的网络可以不同于将服务器装置200连接到用户装置300的网络。
以下将描述具有上述配置的系统S1中的处理。将参考图5来描述从服务器装置200向自主车辆100A提供图像等(例如,图像数据)的处理。
服务器装置200的信息提供单元2044为各个自主车辆100生成服务命令(步骤S501)。信息提供单元2044基于针对各个自主车辆100的服务命令的行驶计划的信息来识别自主车辆100可以行驶的区域(步骤S503)。
服务器装置200的信息提供单元2044基于关于位置(即指定区域)的信息来搜索存储在存储单元206中的综合图像数据库2062,并提取与区域相关的图像等(例如图像数据)(步骤S505)。信息提供单元2044将所提取的图像数据与服务命令一起发送(即提供)给自主车辆100(步骤S507)。
另一方面,当将服务命令发送到自主车辆100时,服务器装置200使用户装置300能够通过应用3061浏览或搜索例如自主车辆100的计划行驶路线和计划行驶时间。当信息获取单元2041从用户装置300接收到请求时,服务器装置200的信息提供单元2044将指示用户装置300的请求的信息(以下称为期望信息)发送给对应的自主车辆100。所发送的期望信息可以包括乘车位置、下车位置和/或期望的乘车时间。期望信息可以包括用户的特征信息。通过基于诸如用户装置300的用户ID的用户信息来搜索存储单元206的用户信息数据库2063,可以提取与用户装置300相关联的用户的性别、年龄和/或偏好。所提取的用户的特征信息可以被提供给自主车辆100,或者诸如适合于用户特征的图像数据的图像等可以被提取并提供给自主车辆100。
将参照图6描述自主车辆100中的图像显示处理。以预定时间间隔重复图6的流程图中的例程。由照相机107拍摄的视频被处理以在各个自主车辆100中实时地显示在显示器W上。在下文中将作为示例描述自主车辆100A中的处理。
自主车辆100A的叠加处理单元1047判定是否满足预定条件(步骤S601)。所述预定条件是预定的安全装置不运行。当用户按下紧急按钮或检测到与计划行驶路线在预定范围内的偏差时,预定的安全装置运行。当不满足预定条件时(步骤S601中为“否”),叠加处理单元1047禁止在显示器W的视频上叠加与自主车辆100A的位置相对应的图像(步骤S603)。因此,由照相机107拍摄的视频实时地连续显示在显示器W上。因此,例程结束。
另一方面,当满足预定条件时(步骤S601为“是”),叠加处理单元1047获取位置信息(步骤S605)。位置信息由位置信息获取单元108获取。随着自主车辆100的移动,获取位置信息。叠加处理单元1047基于该位置信息来搜索存储在存储单元114中的图像数据库1142。因此,当无法提取与对应于该位置的设施或组织有关的图像数据时,即,当不能获取图像数据时(步骤S607中为“否”),将照相机107拍摄的视频实时地连续显示在显示器W上(步骤S603)。因此,例程结束。在步骤S607中,可以判定要获取关于上述图像的信息。
当满足预定条件时(步骤S601中为“是”),图像处理单元1045可以获取位置信息(步骤S605),并将对图像的请求命令发送至服务器装置200。图像处理单元1045可以从服务器装置200获取与当时的自主车辆100A的位置相对应的图像(步骤S607中为“是”),并将该图像提供给叠加处理单元1047。
当叠加处理单元1047获取与自主车辆100A的位置相对应的图像数据时(步骤S607为“是”),叠加处理单元1047通过视频接收单元1046获取视频(步骤S609)。这是为了进行处理以使所获取的图像数据的图像被显示为叠加在显示器W上显示的视频上。叠加处理单元1047执行以下处理:在所获取的车辆外部的真实视频上叠加与该位置相对应的图像并且将其显示在显示器W上(步骤S611)。在图1中,由于自主车辆位于存在很多饰品商店的区域,所以在显示器W上显示表示戒指的图像R1和R2以及车辆外部风景的视频L。在图1中,由于显示器W在车辆内部,所以显示器W、视频和图像由虚线表示。
如上所述,根据第一实施例,与自主车辆100的位置相对应的图像被叠加在自主车辆100的显示器W上显示的车辆外部的视频上。因此,通过自主车辆100A的信息处理设备102的控制单元104执行的处理,可以根据自主车辆100A的外部适当地进行刺激。
将参照图7和图8描述第二实施例。下面,将在第二实施例中说明与第一实施例的不同点,并省略相同的说明。
除了第一实施例的视频显示系统S1的配置之外,第二实施例的视频显示系统S2还包括设置在预定区域中的信息发送装置D。信息发送装置D的数量不限于一个,并且可以是任何数量。图7示出了信息发送装置D的一个示例。自主车辆100的控制单元104和信息发送装置D执行作为信息处理系统的一个示例的处理。然而,信息处理系统可以进一步包括服务器装置200。此外,自主车辆100的控制单元104和服务器装置200可以执行作为信息处理系统的一个示例的处理。
信息发送装置D发送用于推广的图像数据(以下称为发送的图像数据),例如对位于预定区域的特定店铺或特定设施进行宣传。信息发送装置D发送的信息不限于图像,也可以是与上述图像有关的信息。通信单元112被配置为使得自主车辆100的信息获取单元1041可以从信息发送装置D获取所发送的图像数据。自主车辆100的图像处理单元1045对通过信息获取单元1041从信息发送装置D获取的图像等(即,图像数据)进行处理。即,图像处理单元1045将已获取的发送的图像数据存储在存储单元114的图像数据库1142中。在图7的示例中,信息发送装置D与第一钻石商店DS相关联,并且被安装在第一钻石商店DS的店铺中。
信息发送装置D可以是例如无线局域网(LAN)的接入点。在根据第一实施例的服务器装置200中,CPU执行安装在主存储单元中的网络服务器程序等,并通过无线LAN的接入点发送各种类型的信息。但是,服务器装置200可以是信息处理设备,例如为每个区域提供的个人计算机。
信息发送装置D可以具有多个接入点。服务器装置200具有各个接入点的标识信息、各个接入点的位置信息以及指示各个接入点覆盖的范围的信息。位置信息可以包括例如纬度和经度。例如,各个接入点所覆盖的范围是指以接入点的位置为中心的半径。因此,从各个接入点发送的信息可以是与各个接入点的位置相对应的信息。信息发送装置D可以是移动电话网络的基站。信息发送装置D可以使用诸如专用短程通信(DSRC)的通信装置。信息发送装置D可以是通信系统的终端,其使用包括多个
将参考图8描述根据第二实施例的自主车辆100中的自主车辆100A中的图像显示处理。在假定图像已经由参照图5描述的服务器装置200提供的情况下进行以下描述。
图8的流程图对应于图6的流程图,并且,步骤S801、S803以及步骤S807至S813分别对应于图6的步骤S601至S611。
在图8的流程图中,当满足预定条件时(步骤S801中为“是”),自主车辆100A的控制单元104的叠加处理单元1047判定图像处理单元1045是否已经获取了所发送的图像数据。当图像处理单元1045可以获取发送的图像数据时,类似于上述图像数据,图像处理单元1045将所发送的图像数据存储在图像数据库1142中。图像处理单元1045将指示已经获取了所发送的图像数据的信号(以下称为获取信号)发送至叠加处理单元1047。所发送的图像数据包括广告信息、用于向成年男性做广告的图像数据和用于向成年女性做广告的图像数据以及关于用户的年龄和性别的限制信息。即,所发送的图像数据的广告信息根据用户的特征而改变。例如,通过基于来自用户装置300A的用户ID与服务器装置200进行通信,自主车辆100A可以指定搭乘车辆的用户U是成人(例如18岁以上)并且是女性。当接收到获取的信号时,叠加处理单元1047基于用户的特征来搜索图像数据库1142。因此,当可以获取与用户特征匹配或不依赖于用户特征的所发送的图像数据时(步骤S805、S811为“是”),叠加处理单元1047使处理进行到步骤S813。叠加处理单元1047将已经获取的所发送的图像数据与获取的视频一起显示在显示器W上(步骤S813)。由于搭乘自主车辆100A的用户U是成年女性,因此根据用户的特征,用于向成年女性做广告的图像与视频一起显示在显示器W上。
已获取的发送的图像数据包括关联的第一钻石商店DS的广告信息。特别地,已获取的所发送的图像数据包括“第一商店”,其是指示第一钻石商店DS的标题P、女性的戒指的图像R1和男性的领带针的图像。如上所述,由于用户U是成年女性,因此在显示器W上显示“第一商店”和用于女性的戒指的图像R1作为向成年女性做广告的图像(步骤S813),这在图7中例示。
另一方面,例如,当自主车辆100A中的用户是小学生时,叠加处理单元1047不能获取与作为小学生的用户的特征相匹配的传输的图像数据(在步骤S805为“否”)。因此,叠加处理单元1047获取位置信息(步骤S807)。当可以获取基于位置信息的图像数据时(步骤S809中为“是”),创建叠加显示(步骤S811和S813)。
如上所述,在根据第二实施例的视频显示系统S2中,将从位于特定预定区域中的信息发送装置D发送的图像以及基于位置信息的图像用作与自主车辆100A的位置相对应的图像。信息发送装置D可以发送适合于各个店铺或设施的信息。因此,可以灵活地切换或设定要叠加并显示在显示器W的视频上的图像。此外,由于从信息发送装置D发送的图像包括广告信息,因此可以有效地对店铺或设施进行推广和宣传。由于广告信息根据用户的特征而改变,因此可以进一步有效地对店铺或设施进行推广和宣传。
广告信息也可以被包括在基于位置信息提取的图像数据中。如基于第二实施例所描述的,广告信息可以根据用户的特征而改变。
在上述第一实施例和第二实施例中,接收视频和叠加图像的处理由自主车辆100的信息处理设备102的控制单元104执行。然而,这些处理可以由服务器装置200执行。在这种情况下,服务器装置200执行在经由自主车辆100的视频接收单元1046获取(即接收)的视频上叠加图像的处理(图6或图8的处理)。服务器装置200将叠加有图像的视频发送到自主车辆100的信息处理设备102。因此,已经获取信息的控制单元104的叠加处理单元1047可以简单地停止在显示器W上显示照相机107的视频并显示从服务器装置200获取的叠加有图像的视频。此外,接收视频和叠加图像的处理由自主车辆100的信息处理设备和服务器装置200执行,它们分担角色。
上述实施例仅仅是示例,并且可以在不脱离本发明的范围的范围内以适当的修改来实现本发明。除非发生技术矛盾,否则可以自由地组合和实施本发明中描述的处理和/或单元。
此外,被描述为由单个装置执行的处理可以由多个装置以分担的方式执行。例如,服务器装置200(信息处理设备)和/或自主车辆100的信息处理设备102不一定是单个计算机,并且可以被配置为包括多个计算机的系统。可替代地,被描述为由不同装置执行的处理可以由单个装置执行。在计算机系统中,可以灵活地改变用于实现各个功能的硬件配置(例如,服务器配置)。
本发明还可以通过在计算机中提供用于执行实施例中描述的功能的计算机程序,并通过计算机中包括的一个以上处理器来读取并执行该程序来实现。这样的计算机程序可以通过可连接到计算机系统总线的非暂时性计算机可读存储介质提供给计算机,或者可以经由网络提供给计算机。非暂时性计算机可读存储介质的示例包括随机盘(例如磁盘(
- 细胞观察信息处理系统、细胞观察信息处理方法、细胞观察信息处理程序、细胞观察信息处理系统具有的记录部和细胞观察信息处理系统具有的装置
- 信息处理系统、信息处理方法、信息处理设备、信息处理设备控制方法、信息处理终端、信息处理终端控制方法、信息存储介质以及程序