一种对称式双侧驱动竖直升降波浪浮标检定装置
文献发布时间:2023-06-19 12:00:51
技术领域
本发明涉及检定领域,特别是涉及一种对称式双侧驱动竖直升降波浪浮标检定装置。
背景技术
波浪是海洋水文观测的基本要素之一。波浪浮标是目前对波浪进行长期、定时、定点观测的主要设备之一,其系漂浮于海面,跟踪波浪的轨迹运动。它可测量海浪的波高、波周期,有的还可测量波向。对波浪浮标的测量结果进行计量检定,保证测量值的准确可靠,是保障波浪观测有效性的重要措施。
目前国内外计量或科研机构发展了在实验室里检定波浪浮标的计量装置。有的是在拖曳水槽中造波,但这种检定方式投入大,且由于受水槽尺寸限制,造出波浪的波高较小;且大部分的检定方式还是利用室内机械装置,模拟海洋中水质点的简单波动(正弦波),其中旋转式正弦模拟检定装置由于原理明确、波浪特征值(主要是波高及波周期)的复现模拟方式接近海浪理论要求,被广泛采用。
旋转式正弦模拟检定装置一般由环形旋转桁架、电机驱动调速与制动部分、信号测控部分组成。波浪浮标安装在环形旋转桁架上,配重加载在桁架旋转中心轴的另一侧,二者相对中心轴形成的力矩相等,使检定装置达到平衡。波浪浮标在环形旋转桁架的位置固定后,波高即为固定位置至中心轴距离的两倍,波周期即为随桁架旋转一周的时间。同时,为了准确计量波浪浮标测量值,旋转式正弦模拟检定装置需加装水平保持机构,以使波浪浮标能在随之旋转时始终保持状态竖直、正面向上。
但是,利用旋转式正弦模拟检定装置检定波浪浮标时,浮标安装固定后,其位置在旋转过程中不能改变,即波高不可随时调整,因为配重在旋转过程中不能随之调整平衡。如果桁架旋转中心轴两侧发生重量失衡,会发生严重的安全事故。其次,旋转式正弦模拟检定装置只能模拟竖直方向上的规则的、标准的正弦波,但实海况下波浪并不是规则的正弦波,每一个波的波高和波周期都会随时间发生变化,波浪是随机的。这种形式的检定装置不能满足考察波浪浮标对随机波高和波周期的测量性能的要求。此外,旋转式正弦模拟检定装置功能相对单一,只能用于计量加速度计式波浪浮标,不能满足其他声学、光学原理的波浪测量仪或传感器的校准。
发明内容
本发明的目的是设计一种对称双侧驱动的竖直升降式波浪浮标检定装置,用于计量检定波浪浮标的波高和波周期测量性能,该鉴定装置既可以模拟输出竖直方向上的标准的、规则的正弦波,也可模拟输出给定的、不规则的正弦波。对于在负载设计范围内的波浪浮标,整个波浪模拟过程中均不需调整配重,且波浪浮标可时刻保持竖直向上姿态。由于采用对称式双侧驱动结构,不存在负载不均的现象,装置平稳运行。本发明除可用于计量检测加速度计式波浪浮标,还可计量检测部分量程较小的声学、光学原理的波浪测量仪或传感器。
本发明提供了一种对称式双侧驱动竖直升降波浪浮标检定装置,其包括:主框架,所述主框架包括主体立柱,所述主体立柱为左右对称的结构,左侧主体立柱与右侧主体立柱间隔预定距离设置;电机驱动带动系统,所述电机驱动带动系统包括第一电机驱动带动系统和第二电机驱动带动系统,所述第一电机驱动带动系统与左侧主体立柱配合设置,所述第二电机驱动带动系统与右侧主体立柱配合设置;波浪浮标卡具系统,所述波浪浮标卡具系统包括第一卡具滑台架、第二卡具滑台架和波浪浮标卡具;位移测控限位系统,所述位移测控限位系统对所述波浪浮标卡具系统的移动位置进行控制。
其中,进一步包括有底盘,在所述底盘的下部安装有四个福马轮。
其中,进一步包括线缆槽矩形管,所述线缆槽矩形管位于所述左侧主体立柱和右侧主体立柱的顶部。
其中,所述位移测控限位系统连接到PLC控制柜和上位机PC。
其中,在所述主体立柱的外侧设置扶手架进行辅助固定。
其中,所述位移测控限位系统包括第一上限位机械开关、第一下限位机械开关、下限位挡块、位移/位置传感器。
本发明的检定装置可模拟标准的、规则的正弦波,也可以模拟给定的、不规则的正弦波,在载重极限内,整个波浪模拟过程中,装置都是平衡和运行稳定的,波高和波周期都可随时调整并设置,不需要旋转式正弦模拟检定装置的停机调整配重之类的操作。本发明通过控制电机转速即可实现波高和波周期两个要素的同时测控,精确可控。本发明的波浪浮标在计量检定过程中,可一直保持竖直向上的姿态,直接在竖直方向上模拟输出正弦波,不必像旋转式正弦模拟检定装置那样加装水平保持机构。
附图说明
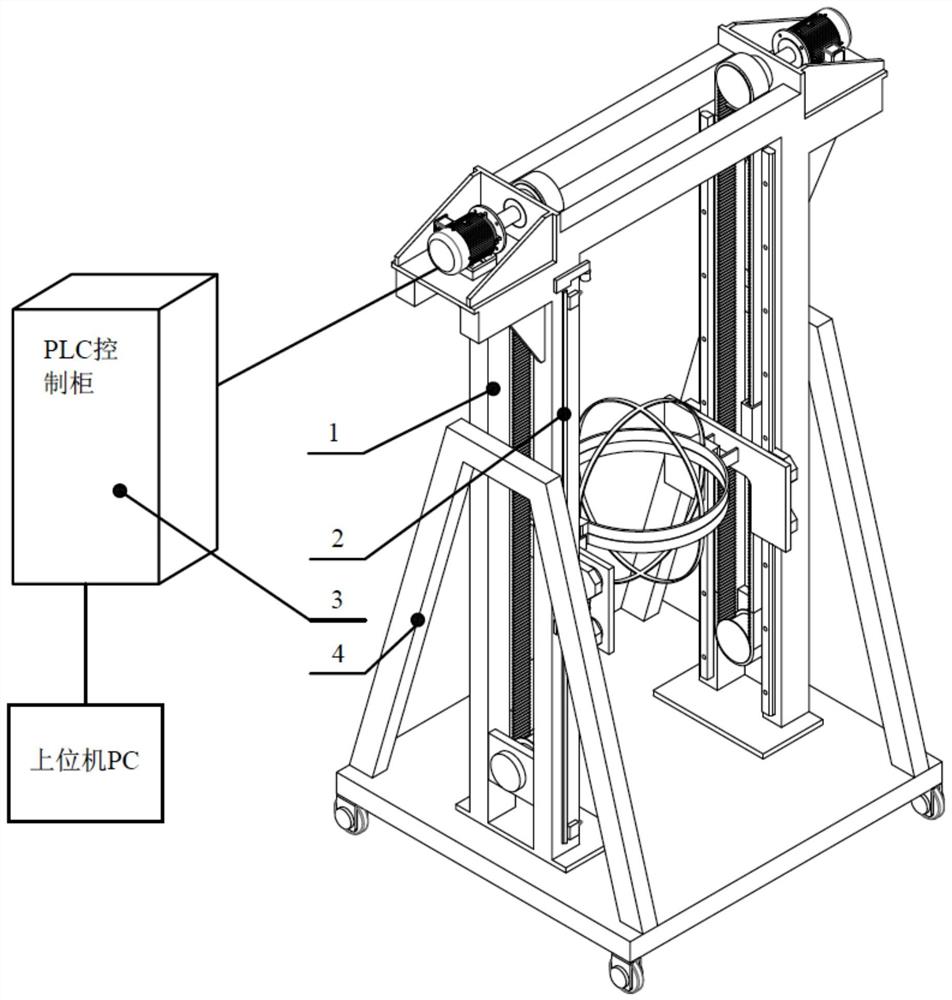
图1为本发明的对称式双侧驱动的竖直升降波浪浮标检定装置的正面整体结构示意图;
图2为本发明的对称式双侧驱动的竖直升降波浪浮标检定装置的侧面整体结构示意图;
图3为本发明的对称式双侧驱动的竖直升降波浪浮标检定装置的局部放大结构示意图。
具体实施方式
为了便于理解本发明,下面结合附图对本发明的实施例进行说明,本领域技术人员应当理解,下述的说明只是为了便于对发明进行解释,而不作为对其范围的具体限定。
本发明提供了一种对称式双侧驱动的竖直升降波浪浮标检定装置,如图1所示,所述检定装置包括:
主框架,所述主框架包括主体立柱1,所述主体立柱1为左右对称的结构,左侧主体立柱与右侧主体立柱间隔预定距离设置;
底盘11,在所述底盘11的下部安装有四个福马轮10,所述四个福马轮10对所述底盘进行支撑;所述主框架设置在所述底盘11上,所述主框架框位于所述底盘11的上表面;所说左侧主体立柱和右侧主体立柱通过连接部件,安装在所述底盘11上,进一步的为了提高所述左侧主体立柱和右侧主体立柱与底盘结合的稳定性,在所述左侧主体立柱的外侧设置扶手架4进行辅助固定,所述扶手架包括左扶手架和右扶手架,左侧扶手架与左侧主体立柱相配合固定,所述右侧扶手架位于所述右侧主体立柱的外侧,所述右侧扶手架与所述右侧主体立柱相配合固定。
线缆槽矩形管17,所述线缆槽矩形管17位于所述左侧主体立柱和右侧主体立柱的顶部,通过所述线缆槽矩形管17将所述左侧主体立柱和右侧主体立柱的顶部实现连接,所述线缆槽矩形管17可以通过固定连接部件实现与所述左侧主体立柱顶部和右侧主体立柱顶部的连接,;进一步的优选,所述线缆槽矩形管17与所述左侧主体立柱顶部和右侧主体立柱顶部为一体化形成。
电机驱动带动系统,所述电机驱动带动系统包括第一电机驱动带动系统和第二电机驱动带动系统。所述第一电机驱动带动系统包括第一电机、第一齿形带、第一同步带主动轮和第一同步带从动轮;第二电机驱动带动系统包括第二电机、第二齿形带、第二同步带主动轮和第二同步带从动轮。
所述第一电机驱动带动系统与左侧主体立柱配合设置,所述第二电机驱动带动系统与右侧主体立柱配合设置。
在所述左侧主体立柱的内侧设置第一直线导轨,所述右侧主体立柱的内侧设置第二直线导轨,所述第一直线导轨和第二直线导轨位置相对,在所述第一直线导轨的上方设置有第一同步带主动轮19,在所述第一直线导轨的下方设置有第一同步带从动轮12,在靠近所述第一同步带主动轮的附件设置有电机,所述第一电机用于对所述同步带主动轮进行驱动。第一齿形带13,所述齿形带13套接在所述第一同步带主动轮19和所述第一同步带从动轮12上;在所述第二直线导轨的上方设置有第二同步带主动轮,在所述第二直线导轨的下方设置有第二同步带从动轮,在靠近所述第二同步带主动轮的附件设置有第二电机16,所述第二电机16用于对所述第二同步带主动轮进行驱动。第二齿形带,所述第二齿形带套接在所述第二同步带主动轮和所述第二同步带从动轮上。
所述第一齿形带、第一同步带主动轮和第一同步带从动轮形成在所述第一直线导轨的内部空间中,所述第二齿形带、第二同步带主动轮和第二同步带从动轮形成在所述第二直线导轨的内部空间中。所述第一电机和第二电机优选为相同型号规格的电机,所述第一电机和第二电机分别安装在左侧的立体立柱和右侧的主体立柱的最上端两侧。所述第一同步带主动轮与第一同步带从动轮保持在同一竖直方位,在所述第一同步带主动轮与第一同步带的外侧安装一圈第一齿形带,当第一电机驱动所述第一同步带主动轮进行转动,所述第一同步带主动轮带动所述第一齿形带,进而带动所述第一同步从动轮。所述第二同步带主动轮与第二同步带从动轮保持在同一竖直方位,在所述第二同步带主动轮与第二同步带的外侧安装一圈第二齿形带,当第二电机驱动所述第二同步带主动轮进行转动,所述第二同步带主动轮带动所述第二齿形带,进而带动所述第二同步从动轮。所述电机驱动带动系统是双套的,平行安装在主框架两侧,呈对称结构。
波浪浮标卡具系统,所述波浪浮标卡具系统包括第一卡具滑台架、第二卡具滑台架14和波浪浮标卡具15,所述第一卡具滑台架和第二卡具滑台架14与所述波浪标卡具15相连接,第一卡具滑台架和第二卡具滑台架14呈双侧对称。所述第一卡具滑台具有夹紧结构,所述夹紧结构架夹紧所述第一直线导轨中的第一齿形带,所述第一卡具滑台架通过螺母结构与所述波浪浮标卡具15的一侧连接;所述第二卡具滑台架具有夹紧结构,所述夹紧结构架夹紧所述第二直线导轨中的第二齿形带,所述第二卡具滑台架通过螺母结构与所述波浪浮标卡具15的另一侧连接。
所述第一卡具滑台架的一侧具有夹紧结构,所述夹紧结构与所述第一直线导轨中的环形第一齿形带中的一个位置进行固定,在所述夹紧结构的两侧还有第一配合结构和第二配合结构,如图3的放大图中所显示的,所述第一配合结构和第二配合结构与所述第一直线导轨的两条轨道相配合,从而所述第一卡具滑台架设置在所述第一直线导轨上,通过所述第一齿形带的运动,可以实现沿着第一直线导轨的上升或下降。
所述第二卡具滑台架的一侧具有夹紧结构,所述夹紧结构与所述第二直线导轨中的环形第二齿形带中的一个位置进行固定,在所述夹紧结构的两侧还有第三配合结构和第四配合结构,如图3的放大图中所显示的,所述第三配合结构和第四配合结构与所述第二直线导轨的两条轨道相配合,从而所述第二卡具滑台架设置在所述第二直线导轨上,通过所述第二齿形带的运动,可以实现沿着第二直线导轨的上升或下降。
所述第一卡具滑台架、第二卡具滑台架通过张紧滚轮和轴承,分别与所述第一直线导轨、第二直线导轨配合固定,在第一、第二齿形带的同步带动下沿所述第一、第二直线导轨上下移动。
进一步的设置位移测控限位系统,所述位移测控限位系统对所述波浪浮标卡具系统的移动位置进行控制,所述位移测控限位系统包括第一上限位机械开关18、第一下限位机械开关8、下限位挡块7、位移/位置传感器2。所述位移/位置传感器2优选为于磁致伸缩位移传感器,磁环或其他形式传感器探头,所述位移/位置传感器2与第一卡具滑台架安装固定,感应测量磁环或其他形式传感器探头距离测量起始点的位移。当所述第一卡具滑台架运动到上、下限位机械开关时,触发断路,电机停止转动,第一齿形带和第二齿形带停止传动,所述第一卡具滑台架和所述第二卡具滑台架停止移动。所述位移/位置传感器设置在主框架的一侧,也可以设置在主框架的两侧。
进一步的所述位移测控限位系统连接到PLC控制柜和上位机PC。
本发明中的第一电机和第二电机通过驱动轴分别连接第一、第二同步带主动轮,有效位移的最下方是第一、第二同步带从动轮,主动轮和从动轮这两轮之间挂有第一、第二齿形带。第一、第二齿形带同步运动形成双侧同步带。双侧电机带动同步带上下运动,进而带动第一、第二卡具滑台架以及波浪浮标卡具15运动。
在所述上位机PC置入预定波高(上下位移)和波周期(从中间起始点开始向上运动到波峰,再向下运动到波谷,再回到中间起始点的时间),即可使检定装置不间断或定时段运动,在竖直方向上模拟出给定曲线的正弦波。
本发明中检定装置可检定波高的最大值由主框架的高度、位移测控限位系统的测量范围决定。
本发明的立体立柱内侧安装有直线导轨,用于固定和限制波浪浮标卡具系统,使之沿直线导轨上下运动。主框架不存在滑轮、弹簧等易变形、易损坏的部件,因此结构坚固,不易损。根据给定波浪浮标的载重极限,待模拟的波高和波周期的范围,计算装置承受的最大加速度和最大运行速度,确定装置整体重量、电机转速和扭矩。可以装载小于载重极限的波浪浮标,在整个波浪模拟过程中,装置都是平衡和运行稳定的,波高和波周期都可随时调整设置,不需要旋转式正弦模拟检定装置的停机调整配重之类的操作。
本发明可以模拟标准的、规则的正弦波,也可以模拟给定的、不规则的正弦波,在载重极限内,整个波浪模拟过程中,装置都是平衡和运行稳定的,波高和波周期都可随时调整并设置,不需要旋转式正弦模拟检定装置的停机调整配重之类的操作。本发明通过控制电机转速即可实现波高和波周期两个要素的同时测控,原理明确,精确可控。本发明的波浪浮标在计量检定过程中,可一直保持竖直向上的姿态。本装置直接在竖直方向上模拟输出正弦波,不必像旋转式正弦模拟检定装置那样加装水平保持机构。
本发明的波浪浮标卡具形状不限,可以是球抱形,便于锁住波浪浮标;也可以是平板形,便于固定体积较小的波浪浮标传感器或其他原理类型的波浪测量仪。
当装置用于计量检测其他原理类型(主要是声学或光学)的波浪测量仪时,在装置底盘铺上吸声材料或符合要求的反射材料,减小装置的机械结构对信号反射回收带来的噪声;将波浪测量仪安装在波浪浮标卡具正中间位置,声学或光学信号向下方打。
可以理解的是,虽然本发明已以较佳实施例披露如上,然而上述实施例并非用以限定本发明。对于任何熟悉本领域的技术人员而言,在不脱离本发明技术方案范围情况下,都可利用上述揭示的技术内容对本发明技术方案作出许多可能的变动和修饰,或修改为等同变化的等效实施例。因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所做的任何简单修改、等同变化及修饰,均仍属于本发明技术方案保护的范围内。
- 一种对称式双侧驱动竖直升降波浪浮标检定装置
- 一种对称式双侧驱动竖直升降波浪浮标检定装置