臂架系统及起重机
文献发布时间:2023-06-19 12:02:28
技术领域
本发明涉及工程机械领域,尤其涉及一种臂架系统及起重机。
背景技术
随着集群化城市的不断建设,全地面起重机的小空间、大高度的应用越来越受到客户和市场的青睐。相关技术中,全地面起重机的臂架只能实现一级变幅,在特定工况下,与建筑物边缘存在“抗杆”的问题,导致变幅副臂无法继续向前变幅,也就无法满足多种吊装作业要求。
发明内容
本发明的一些实施例提出一种臂架系统及起重机,用于缓解无法满足多种吊装作业需求的问题。
本发明的一些实施例提供了一种臂架系统,其包括:
主臂;以及
副臂,与所述主臂可转动地连接,所述副臂包括第一架体、第二架体和连接组件,所述第一架体和所述第二架体沿所述副臂的长度延伸方向依次设置,所述第一架体与所述第二架体临近的一侧包括第一部以及与所述第一部相对的第二部,所述第一架体的第一部与所述第二架体可转动地连接,所述第一架体的第二部与所述连接组件可转动地连接,所述连接组件设于所述第二架体。
在一些实施例中,所述连接组件包括:
第一连接件,设于所述第二架体;以及
第二连接件,与所述第一连接件可移动地连接,所述第二连接件与所述第一架体可转动地连接。
在一些实施例中,所述副臂还包括接头,所述接头设于所述第一架体的第二部,所述接头包括第一挡板和第二挡板,所述第一挡板和所述第二挡板分别对应位于所述副臂长度延伸方向的两侧,所述第二连接件的端部设于所述第一挡板与所述第二挡板之间,且与所述接头可转动地连接。
在一些实施例中,所述接头还包括第三挡板,所述第三挡板设于所述第一挡板与所述第二挡板之间,所述第二连接件的端部包括第一连接部和第二连接部,所述第一连接部设于所述第一挡板与所述第三挡板之间,所述第二连接部设于所述第二挡板与所述第三挡板之间。
在一些实施例中,在所述第一架体和所述第二架体位于同一直线时,所述第一连接件的端部与所述第三挡板抵接。
在一些实施例中,所述副臂还包括接头,所述接头设于所述第一架体的第二部,所述第二连接件通过所述接头与所述第一架体可转动地连接,在所述第一架体和所述第二架体位于同一直线时,所述第一连接件的端部与所述接头的部分部位抵接。
在一些实施例中,所述接头包括第一挡板和第二挡板,所述第一挡板和所述第二挡板分别对应位于所述副臂长度延伸方向的两侧,在所述第一架体和所述第二架体位于同一直线时,所述第一连接件的端部位于所述第一挡板与所述第二挡板之间。
在一些实施例中,所述接头还包括第三挡板,所述第三挡板位于所述第一挡板和所述第二挡板之间,在所述第一架体和所述第二架体位于同一直线时,所述第一连接件的端部与所述第三挡板抵接。
在一些实施例中,所述副臂还包括销轴,所述第一连接件设有沿所述副臂的长度方向延伸的条形孔,所述第二连接件包括第一板、第二板和第三板,所述第一板和所述第二板分别位于所述第一连接件的沿所述副臂的长度方向延伸的两侧,所述第三板连接所述第一板和所述第二板,所述第一板和所述第二板上沿所述副臂的长度延伸方向均间隔设有多个销孔,所述销轴被配置为可选择地穿过所述第一板上的其中一个销孔、所述条形孔和所述第二板上的其中一个销孔。
在一些实施例中,所述副臂还包括销轴,所述第一连接件设有沿所述副臂的长度方向延伸的条形孔,所述第二连接件包括管件,所述管件套设在所述第一连接件上,所述管件沿所述副臂的长度方向设有多个销孔,所述销轴被配置为可选择地穿过所述管件上的其中一个销孔和所述条形孔。
在一些实施例中,所述副臂还包括接头,所述接头设于所述第一架体的第二部,所述第二连接件包括管件,所述管件包括第三连接部和第四连接部,所述第三连接部和所述第四连接部分别设于所述接头的两侧,且与所述接头可转动地连接。
在一些实施例中,所述第二架体被配置为在其自身重力的作用下相对于所述第一架体向下转动。
本发明的一些实施例提供了一种起重机,其包括上述的臂架系统。
在一些实施例中,起重机还包括第一变幅机构和第二变幅机构,所述第一变幅机构连接于所述副臂,所述第一变幅机构被配置为实现所述副臂相对于所述主臂的转动,所述第二变幅机构连接于所述第二架体,所述第二变幅机构被配置为实现所述第二架体相对于所述第一架体的转动。
基于上述技术方案,本发明至少具有以下有益效果:
在一些实施例中,副臂相对于主臂可转动地设置,可实现一级变幅;第二架体相对于第一架体可转动,可实现二级变幅,通过调整副臂与主臂之间的转动角度,以及调整第二架体和第一架体之间的转动角度,能够满足多种不同吊装作业要求。
附图说明
此处所说明的附图用来提供对本发明的进一步理解,构成本申请的一部分,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
图1为根据本发明一些实施例提供的起重机的示意图;
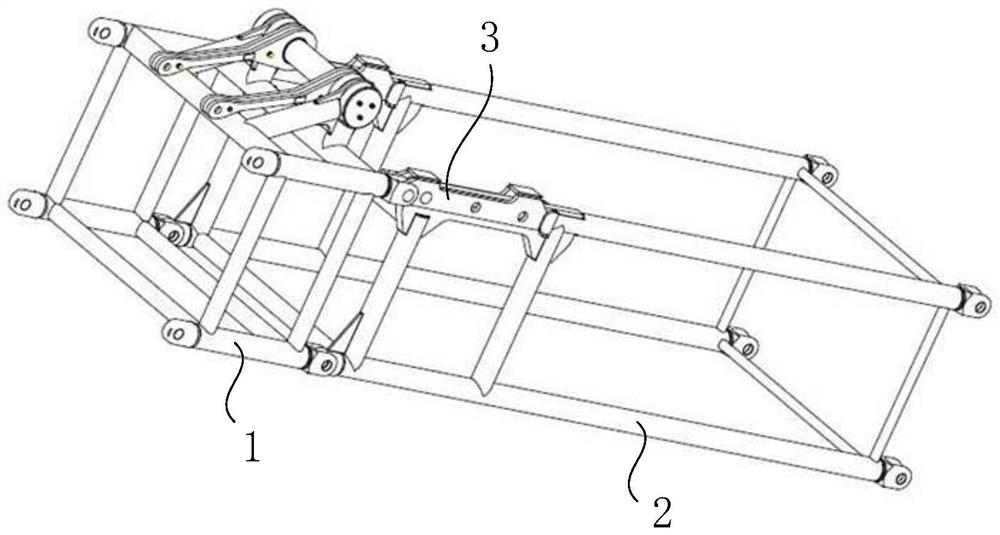
图2为根据本发明一些实施例提供的臂架系统的第一支架与第二支架在同一直线的示意图;
图3为根据本发明一些实施例提供的连接组件的拆分状态的示意图;
图4为根据本发明一些实施例提供的连接组件与接头连接部位的局部放大示意图;
图5为根据本发明一些实施例提供的臂架系统的第一支架与第二支架相对转动的示意图;
图6为根据本发明另一些实施例提供的臂架系统的第一支架与第二支架在同一直线的示意图。
附图中标号:
100-主臂;200-副臂;300-第一变幅机构;400-第二变幅机构;
1-第一架体;
2-第二架体;
3-连接组件;31-第一连接件;311-条形孔;32-第二连接件;321-第一连接部;322-第二连接部;323-第一板;324-第二板;325-第三板;326-销孔;33-管件;331-第三连接部;332-第四连接部;
4-接头;41-第一挡板;42-第二挡板;43-第三挡板;
5-销轴。
具体实施方式
下面将结合本发明实施例中的附图,对实施例中的技术方案进行清楚、完整地描述。显然,所描述的实施例仅仅是本发明的一部分实施例,而不是全部的实施例。基于本发明的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明保护范围的限制。
如图1所示,一些实施例提供了一种臂架系统,其包括主臂100和副臂200。其中,副臂200与主臂100可转动地连接。
如图2所示,副臂200包括第一架体1、第二架体2和连接组件3。第一架体1和第二架体2沿副臂200的长度延伸方向依次设置。第一架体1与第二架体2临近的一侧包括第一部以及与第一部相对的第二部。第一架体1的第一部与第二架体2可转动地连接,第一架体1的第二部与连接组件3可转动地连接,连接组件3设于第二架体2。
此处的第一架体1的第一部为如图3所示方位的第一架体1的上部,此处的第一架体1的第二部为如图3所示方位的第一架体的下部。对应的,第一架体1的第一部与第二架体2的第一部转动连接,第一架体1的第二部与第二架体2的第二部通过连接组件3转动连接。
可选地,在图3所示的实施例中,第一架体1的第一部与第二架体2之间设有两个铰接位置,也就是通过两个铰接轴连接。第一架体1的第二部与第二架体2之间通过两个连接组件3连接。
由于副臂200相对于主臂100可转动地设置,因此,副臂200可实现一级变幅。由于第一架体1的第一部与第二架体2可转动地设置,第一架体1的第二部通过连接组件3与第二架体2可转动地连接,因此,第二架体2相对于第一架体1可转动,因此,副臂200可实现二级变幅。本实施例中,臂架系统的副臂200具有二级变幅功能,且变幅结构简单、重量轻,可承受较大拉压及弯矩。
通过第二架体2和第一架体1的相对转动,实现副臂200的二级变幅,在有限空间吊装作业时,通过第二架体2和第一架体1的转动角度,避开建筑物与副臂200的“抗杆”现象,拓展了起重机的作业工况范围。
如图1和图2所示,起臂时,副臂200的臂头未离开地面,第二架体2和第一架体1在同一直线上,其状态如图2所示,可承受较大压力及弯矩。
如图5所示,起臂后,在第二架体2和其前端臂架的重力作用下,第二架体2相对于第一架体1转动,通过连接组件3,第二架体2的第二部远离第一架体1的第二部。在如图5所示的方位中,第二架体2相对于第一架体1顺时针旋转至选定工况状态后,可进行后续的吊装作业。
如图3所示,在一些实施例中,连接组件3包括第一连接件31和第二连接件32。
第一连接件31设于第二架体2。第二连接件32与第一连接件31可移动地连接,第二连接件32与第一架体1可转动地连接。
如图5所示,起臂后,第一连接件31随第二架体2相对于第一架体1转动,由于第二连接件32连接第一架体1,第二连接件32与第一连接件31之间产生相对移动,以实现工况所需的多角度变幅。第二架体2相对于第一架体1沿着预定轨迹旋转,可实现抗弯矩状态和工况所需状态的自由切换,既可承受拉力,又可承受一定的压力及弯矩。
如图4所示,在一些实施例中,副臂200还包括接头4,接头4设于第一架体1的第二部,接头4包括第一挡板41和第二挡板42,第一挡板41和第二挡板42分别对应位于副臂200长度延伸方向的两侧,第二连接件32的端部设于第一挡板41与第二挡板42之间,且与接头4可转动地连接。
第二连接件32的端部设于第一挡板41与第二挡板42之间,通过第一挡板41与第二挡板42的配合,既限制了第二连接件32与第一连接件31之间相对运动过程中可能产生的侧向位移,又可承受一定的侧向载荷。
在一些实施例中,接头4还包括第三挡板43,第三挡板43设于第一挡板41和第二挡板42之间,第二连接件32的端部包括第一连接部321和第二连接部322,第一连接部321设于第一挡板41与第三挡板43之间,第二连接部322设于第二挡板42与第三挡板43之间。
第二连接件32的端部伸入到接头4内,通过第一挡板41、第三挡板43与第二挡板42的配合,既限制了第二连接件32与第一连接件31之间相对运动过程中可能产生的侧向位移,又可承受一定的侧向载荷,同时承受较大压力及弯矩承载需求。
在一些实施例中,在第一架体1和第二架体2位于同一直线时,第一连接件31的端部与第三挡板43抵接。
在副臂200起臂时,第二架体2相对于第一架体1转动,且旋转至第二架体2上的第一连接件31与第一架体1上的第三挡板43接触,此时,在第一架体1和第二架体2位于同一直线,可承受较大压力和弯矩。副臂200的臂头离开地面后,第二架体2相对于第一架体1转动至工况所需角度进行吊装作业。本公开实施例提供的臂架系统既适用于狭窄空间,又可满足拉力承载需求。
在一些实施例中,副臂200还包括接头4,接头4设于第一架体1的第二部,第二连接件32通过接头4与第一架体1可转动地连接,在第一架体1和第二架体2位于同一直线时,第一连接件31的端部与接头4的部分部位抵接。连接组件3的第一连接件31可直接抵到第一架体1的接头4处,可承受较大压力及弯矩。
在一些实施例中,接头4包括第一挡板41和第二挡板42,第一挡板41和第二挡板42分别对应位于副臂200长度延伸方向的两侧,在第一架体1和第二架体2位于同一直线时,第一连接件31的端部位于第一挡板41与第二挡板42之间。第二连接件32的端部伸入到接头4内,通过第一挡板41与第二挡板42的配合,既限制了第二连接件32与第一连接件31之间相对运动过程中可能产生的侧向位移,又可承受一定的侧向载荷,同时承受较大压力及弯矩承载需求。
在一些实施例中,接头4还包括第三挡板43,第三挡板43位于第一挡板41和第二挡板42之间,在第一架体1和第二架体2位于同一直线时,第一连接件31的端部与第三挡板43抵接。连接组件3的第一连接件31可直接抵到第一架体1的接头4处,可承受较大压力及弯矩。
在一些实施例中,如图3所示,副臂200还包括销轴5,第一连接件31设有沿副臂200的长度方向延伸的条形孔311,第二连接件32包括第一板323、第二板324和第三板325,第一板323和第二板324分别位于第一连接件31的沿副臂200的长度方向延伸的两侧,第三板325连接第一板323和第二板324,第一板323和第二板324上沿副臂200的长度延伸方向均间隔设有多个销孔326,销轴5被配置为可选择地穿过第一板323上的其中一个销孔326、条形孔311和第二板324上的其中一个销孔326。
第一板323和第二板324上沿副臂200的长度延伸方向均间隔设有多个销孔326,第一板323上的销孔326与第二板324上的销孔326一一对齐。在实际使用过程中,可以根据需要变幅的幅度,在多个销孔326中选择第一板323上的一个销孔326和第二板324上的一个销孔326,将销轴5依次穿过第一板323上的销孔326、第一连接件31上的条形孔311,以及第二板324上的销孔326,通过销轴5对第二连接件32相对于第一连接件31的相对移动进行限位和导向。
例如:如图3所示,第一板323和第二板324上均间隔设有三个销轴孔326,在第二连接件32装配至第一连接件31上后,可通过销轴5选择销孔326中的其中一个插入,如图3中所示,销轴5插入的销孔326与第二连接件32上的铰接孔邻近。
在一些实施例中,副臂200还包括销轴5,第一连接件31设有沿副臂200的长度方向延伸的条形孔311,第二连接件32包括管件33,管件33套设在第一连接件31上,管件33沿副臂200的长度方向设有多个销孔326,销轴5被配置为可选择地穿过管件33上的其中一个销孔326和条形孔311,通过销轴5对管件33相对于第一连接件31的相对移动进行限位和导向。
如图6所示,在一些实施例中,副臂200还包括接头4,接头4设于第一架体1的第二部,第二连接件32包括管件33,管件33包括第三连接部331和第四连接部332,第三连接部331和第四连接部332分别设于接头4的两侧,且与接头4可转动地连接。
在一些实施例中,第二架体2被配置为在其自身重力的作用下相对于第一架体1向下转动。
在一些实施例中,无论选择何种变幅角度工况,起臂时,第一连接件31随第二架体2相对于第一架体1转动,由于第二连接件32连接第一架体1,第二连接件32与第一连接件31之间产生相对移动,归位到抗弯矩状态,例如:第一架体1和第二架体2位于同一直线,(第一连接件31的端部与第三挡板43抵接);起臂后,第二架体2在其自身重力的作用下相对于第一架体1向下转动,自动滑动到工况所需状态;第二连接件32的端部设于第一挡板41与第二挡板42之间,通过第一挡板41与第二挡板42的配合,既限制了第二连接件32与第一连接件31之间相对运动过程中可能产生的侧向位移,也提高了第二连接件32承受侧向载荷的能力。
如图1所示,一些实施例提供了一种起重机,其包括上述的臂架系统。
起重机包括具有二级变幅的臂架系统,在高楼作业时,具有防扛杆的效果,起臂前先选定工况,但无论选用何种角度的变幅工况进行吊装作业,在臂头未离开地面阶段,二级变幅结构都会自动归位到统一的抗压力及弯矩结构状态,例如:第一架体1和第二架体2位于同一直线,且位于副臂200的长度延伸方向,离开地面后再缓慢切换到选定工况所需的角度,以便进行后续的吊装作业。
第一架体1和第二架体2通过连接组件3连接,既能够实现二级变幅,又能够承受压力和弯矩,但在正常吊装作业时,连接组件3还可以承受相应的拉力。
在一些实施例中,起重机还包括第一变幅机构300和第二变幅机构400,第一变幅机构300连接于副臂200,第一变幅机构300被配置为实现副臂200相对于主臂100的转动,实现副臂200的一级变幅,第二变幅机构400连接于第二架体2,第二变幅机构400被配置为实现第二架体2相对于第一架体1的转动,实现副臂200的二级变幅。
在一些实施例中,起重机通过第一变幅机构300带动臂架一级变幅,再通过第二变幅机构400带动副臂200二级变幅,在起升高度高、幅度较大,但起重量要求不高的工况下,可有效避免吊重作业时的“抗杆”问题,大大拓展了工作范围。
在一些实施例中,副臂200的第一架体1和第二架体2不仅可相对转动进行二级变幅,适用于狭窄空间,还可以自动归位到抗弯矩状态,承受较大压力和弯矩。同时,当第一架体1和第二架体2位于同一直线,也就是第一架体1和第二架体2之间的夹角为0°时,本公开提供的臂架系统可整体切换到常规的只有一级变幅臂架系统的工况。
变幅机构,通过钢丝绳、拉板或油缸实现铰点转动,带动整个臂架实现目标角度变幅,以满足所需工况吊装作业。
可选地,第一变幅机构300包括卷扬。
可选地,第二变幅机构400包括拉板或油缸。
可选地,起重机包括全地面起重机。
在一些实施例中,起重机的臂架系统具有二级变幅功能,能够实现起落臂与工作状态的切换。
基于上述本发明的各实施例,在没有明确否定的情况下,其中一个实施例的技术特征可以有益地与其他一个或多个实施例相互结合。
在本发明的描述中,需要理解的是,使用“第一”、“第二”、“第三”等词语来限定零部件,仅仅是为了便于对上述零部件进行区别,如没有另行声明,上述词语并没有特殊含义,因此不能理解为对本发明保护范围的限制。
最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制;尽管参照较佳实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者对部分技术特征进行等同替换;而不脱离本发明技术方案的精神,其均应涵盖在本发明请求保护的技术方案范围当中。
- 一种起重机臂架系统及起重机
- 起重机臂架系统及起重机