一种无轨胶轮车的控制方法和系统
文献发布时间:2023-06-19 12:02:28
技术领域
本发明涉及无轨胶轮车控制领域,特别是涉及一种无轨胶轮车的控制方法和系统。
背景技术
增程式电动汽车在纯电动汽车的基础上配备增程器。最开始增程式电动汽车主要目的就是解决电动汽车续航里程的焦虑问题,但这种增程式电动汽车的动力电池比能量较小,体积和重量较大,使得车辆油耗偏高。随着技术进步,增程式电动汽车的电力系统整体优化,主要体现在:发动机能量优化;动力电池组比能量优化。
增程式电动汽车的使用一方面能够实现部分工况的纯电动行驶,用来满足人们的行驶需求,与纯电动汽车相比,电池容量更小,从而有效减轻汽车重量,且降低整车成本;当增程式电动汽车电池电量降低到设定最小阈值时会自动开启增程器,在增加续航里程的同时还能够延长动力电池的使用寿命;增程式电动汽车在增程器开启后根据驾驶工况的需求功率,调整发动机的输出功率,使其工作在高效率和低污染排放区间,达到较好的经济性能且降低污染。拥有众多优点的增程式电动汽车已经成为现阶段汽车行业重点研究方向。
在煤矿行业中,纯电动无轨胶轮车已成规模应用,煤矿井下防爆无轨胶轮车具有无污染排放、结构简单、维修使用方便、无需消声装置、维修费用少等优点。但其由于防爆要求的限制,电池容量不足,进而导致整车续航里程过小。因此有人提出一款具有复合电源系统的纯电动无轨胶轮车,复合电源系统由超级电容、防爆锂电池、能源管理模块和充电系统组成。以防爆锂电池作为主能源,保证车辆行驶的续航里程,超级电容作为辅助能源,在锂电池电量不足时给蓄锂电池充电,优化汽车启停性能,延长电池寿命,但超级电容能量密度小,成本高等问题也限制了超级电容在整车中的应用。
并且现有的防爆电动无轨胶轮车,在使用过程中,逐渐出现了以下问题:在防爆要求的限制下,电池箱结构设计沉重,为保证乘员和运输物品的空间,只能尽可能缩减电池数量,因而导致整车续驶里程不足,需要频繁充电,增加了调度难度。还有,因为续驶里程不足,为了满足工作需要,电池经常处于深充深放状态,使用环境进一步恶化,造成电池使用寿命的缩减,同时也导致了电池一致性和安全性能的降低,直接给煤矿安全生产带来重大安全隐患。
因此,如何在使电池长期处于浅充浅放的工作区间的同时,能够控制发动机工作在高效、污染小的区间成为本领域亟待解决的技术问题。
发明内容
为解决现有技术中存在的上述问题,本发明提供了一种无轨胶轮车的控制方法和系统。
为实现上述目的,本发明提供了如下方案:
一种无轨胶轮车的控制方法,包括:
获取预设功率和无轨胶轮车的电机需求功率;
根据所述预设功率和所述电机需求功率确定所述无轨胶轮车的行驶工况;所述行驶工况包括:进入副平硐路段工况、驶出采区运输下山路段工况、运输大巷路段工况、工作面运输顺槽工况、驶出副平硐路段工况和驶入采区运输下山路段工况;
获取无轨胶轮车的制动强度、电池的荷电状态和电池的最大功率;
基于确定的所述行驶工况,根据所述制动强度、所述荷电状态和所述最大功率确定制动模式和整车动力模式;所述制动模式包括:混合制动模式、电机制动模式、机械制动模式;整车动力模式包括:第一增程模式、第二增程模式和纯电模式。
优选地,所述根据所述预设功率和所述电机需求功率确定所述无轨胶轮车的行驶工况,具体包括:
判断所述预设功率是否小于所述电机需求功率,得到第一判断结果;
当所述第一判断结果为所述预设功率小于所述电机需求功率时,判定所述行驶工况为进入副平硐路段工况或驶出采区运输下山路段工况;
当所述第一判断结果为所述预设功率大于等于所述电机需求功率时,判断所述预设功率是否等于所述电机需求功率,得到第二判断结果;
当所述第二判断结果为所述预设功率等于所述电机需求功率时,判定所述行驶工况为运输大巷路段工况或工作面运输顺槽工况;
当所述第二判断结果为所述预设功率不等于所述电机需求功率时,判定所述行驶工况为驶出副平硐路段工况或驶入采区运输下山路段工况。
优选地,所述基于确定的所述行驶工况,根据所述制动强度、所述荷电状态和所述最大功率确定制动模式和整车动力模式,具体包括:
获取第一电荷状态预设值、第二电荷状态预设值、第三电荷状态预设值和制动强度预设值;
当所述行驶工况为进入副平硐路段工况或驶出采区运输下山路段工况时,判断所述电荷状态是否小于等于所述第一电荷状态预设值,得到第三判断结果;
当所述第三判断结果为所述电荷状态小于等于所述第一电荷状态预设值时,判断所述自动强度是否小于等于所述制动强度预设值,得到第四判断结果;
当所述第四判断结果为所述自动强度小于等于所述制动强度预设值时,确定无轨胶轮车的制动模式为电机制动模式;
当所述第四判断结果为所述自动强度大于所述制动强度预设值时,确定无轨胶轮车的制动模式为混合制动模式;
当所述第三判断结果为所述电荷状态大于所述第一电荷状态预设值时,确定无轨胶轮车的制动模式为机械制动模式;
当所述行驶工况为运输大巷路段工况或工作面运输顺槽工况时,判断所述电荷状态是否小于等于所述第二电荷状态预设值,得到第五判断结果;
当所述第五判断结果为所述电荷状态小于等于所述第二电荷状态预设值时,判断所述电荷状态是否小于等于所述第三电荷状态预设值,得到第六判断结果;
当所述第六判断结果为所述电荷状态小于等于所述第三电荷状态预设值时,确定无轨胶轮车的整车动力模式为第二增程模式;
当所述第六判断结果为所述电荷状态大于所述第三电荷状态预设值时,确定无轨胶轮车的整车动力模式为第一增程模式;
当所述第五判断结果为所述电荷状态大于所述第二电荷状态预设值时,确定无轨胶轮车的整车动力模式为纯电模式;
当所述行驶工况为驶出副平硐路段工况或驶入采区运输下山路段工况时,判断所述电机需求功率是否大于等于所述电池的最大功率,得到第七判断结果;
当所述第七判断结果为所述电机需求功率大于等于所述电池的最大功率时,判断所述电荷状态是否小于等于所述第二电荷状态预设值,得到第八判断结果;
当所述第八判断结果为所述电荷状态小于等于所述第二电荷状态预设值时,确定无轨胶轮车的整车动力模式为第一增程模式;
当所述第八判断结果为所述电荷状态大于所述第二电荷状态预设值时,确定无轨胶轮车的整车动力模式为纯电模式;
当所述第七判断结果为所述电机需求功率小于所述电池的最大功率时,判断所述电荷状态是否小于所述第三电荷状态预设值,得到第九判断结果;
当所述第九判断结果为所述电荷状态小于所述第三电荷状态预设值时,确定无轨胶轮车的整车动力模式为第二增程模式;
当所述第九判断结果为所述电荷状态大于等于所述第三电荷状态预设值时,确定无轨胶轮车的整车动力模式为第一增程模式。
优选地,所述当所述第六判断结果为所述电荷状态小于等于所述第三电荷状态预设值时,确定无轨胶轮车的整车动力模式为第二增程模式,之后还包括:
实时判断所述电荷状态是否大于等于所述第二电荷状态预设值,得到第十判断结果;
当所述第十判断结果为所述电荷状态大于等于所述第二电荷状态预设值时,将无轨胶轮车的整车动力模式切换为纯电模式;
当所述第十判断结果为所述电荷状态小于所述第二电荷状态预设值时,保持无轨胶轮车的整车动力模式为第二增程模式。
根据本发明提供的具体实施例,本发明公开了以下技术效果:
本发明提供的无轨胶轮车的控制方法,在采用获取的预设功率和电机需求功率确定无轨胶轮车的行驶工况后,基于确定的行驶工况,根据获取的制动强度、荷电状态和最大功率确定制动模式和整车动力模式,以能够在使电池长期处于浅充浅放的工作区间的同时,控制发动机工作在高效、污染小的区间。
对应于上述提供的无轨胶轮车的控制方法,本发明还提供了以下方案:
一种无轨胶轮车的控制系统,包括:
第一获取模块,用于获取预设功率和无轨胶轮车的电机需求功率;
行驶工况确定模块,用于根据所述预设功率和所述电机需求功率确定所述无轨胶轮车的行驶工况;所述行驶工况包括:进入副平硐路段工况、驶出采区运输下山路段工况、运输大巷路段工况、工作面运输顺槽工况、驶出副平硐路段工况和驶入采区运输下山路段工况;
第二获取模块,用于获取无轨胶轮车的制动强度、电池的荷电状态和电池的最大功率;
制动模式确定模块,用于基于确定的所述行驶工况,根据所述制动强度、所述荷电状态和所述最大功率确定制动模式和整车动力模式;所述制动模式包括:混合制动模式、电机制动模式、机械制动模式;整车动力模式包括:第一增程模式、第二增程模式和纯电模式。
优选地,所述行驶工况确定模块包括:
第一判断单元,用于判断所述预设功率是否小于所述电机需求功率,得到第一判断结果;
第一行驶工况确定单元,用于当所述第一判断结果为所述预设功率小于所述电机需求功率时,判定所述行驶工况为进入副平硐路段工况或驶出采区运输下山路段工况;
第二判断单元,用于当所述第一判断结果为所述预设功率大于等于所述电机需求功率时,判断所述预设功率是否等于所述电机需求功率,得到第二判断结果;
第二行驶工况确定单元,用于当所述第二判断结果为所述预设功率等于所述电机需求功率时,判定所述行驶工况为运输大巷路段工况或工作面运输顺槽工况;
第三行驶工况确定单元,用于当所述第二判断结果为所述预设功率不等于所述电机需求功率时,判定所述行驶工况为驶出副平硐路段工况或驶入采区运输下山路段工况。
优选地,所述制动模式确定模块包括:
获取单元,用于获取第一电荷状态预设值、第二电荷状态预设值、第三电荷状态预设值和制动强度预设值;
第三判断单元,用于当所述行驶工况为进入副平硐路段工况或驶出采区运输下山路段工况时,判断所述电荷状态是否小于等于所述第一电荷状态预设值,得到第三判断结果;
第四判断单元,用于当所述第三判断结果为所述电荷状态小于等于所述第一电荷状态预设值时,判断所述自动强度是否小于等于所述制动强度预设值,得到第四判断结果;
第一制动模式确定单元,用于当所述第四判断结果为所述自动强度小于等于所述制动强度预设值时,确定无轨胶轮车的制动模式为电机制动模式;
第二制动模式确定单元,用于当所述第四判断结果为所述自动强度大于所述制动强度预设值时,确定无轨胶轮车的制动模式为混合制动模式;
第三制动模式确定单元,用于当所述第三判断结果为所述电荷状态大于所述第一电荷状态预设值时,确定无轨胶轮车的制动模式为机械制动模式;
第五判断单元,用于当所述行驶工况为运输大巷路段工况或工作面运输顺槽工况时,判断所述电荷状态是否小于等于所述第二电荷状态预设值,得到第五判断结果;
第六判断单元,用于当所述第五判断结果为所述电荷状态小于等于所述第二电荷状态预设值时,判断所述电荷状态是否小于等于所述第三电荷状态预设值,得到第六判断结果;
第四制动模式确定单元,用于当所述第六判断结果为所述电荷状态小于等于所述第三电荷状态预设值时,确定无轨胶轮车的整车动力模式为第二增程模式;
第五制动模式确定单元,用于当所述第六判断结果为所述电荷状态大于所述第三电荷状态预设值时,确定无轨胶轮车的整车动力模式为第一增程模式;
第六制动模式确定单元,用于当所述第五判断结果为所述电荷状态大于所述第二电荷状态预设值时,确定无轨胶轮车的整车动力模式为纯电模式;
第七判断单元,用于当所述行驶工况为驶出副平硐路段工况或驶入采区运输下山路段工况时,判断所述电机需求功率是否大于等于所述电池的最大功率,得到第七判断结果;
第八判断单元,用于当所述第七判断结果为所述电机需求功率大于等于所述电池的最大功率时,判断所述电荷状态是否小于等于所述第二电荷状态预设值,得到第八判断结果;
第七制动模式确定单元,用于当所述第八判断结果为所述电荷状态小于等于所述第二电荷状态预设值时,确定无轨胶轮车的整车动力模式为第一增程模式;
第八制动模式确定单元,用于当所述第八判断结果为所述电荷状态大于所述第二电荷状态预设值时,确定无轨胶轮车的整车动力模式为纯电模式;
第九判断单元,用于当所述第七判断结果为所述电机需求功率小于所述电池的最大功率时,判断所述电荷状态是否小于所述第三电荷状态预设值,得到第九判断结果;
第十制动模式确定单元,用于当所述第九判断结果为所述电荷状态小于所述第三电荷状态预设值时,确定无轨胶轮车的整车动力模式为第二增程模式;
第十一制动模式确定单元,用于当所述第九判断结果为所述电荷状态大于等于所述第三电荷状态预设值时,确定无轨胶轮车的整车动力模式为第一增程模式。
优选地,所述制动模式确定模块还包括:
第十判断单元,用于实时判断所述电荷状态是否大于等于所述第二电荷状态预设值,得到第十判断结果;
制动模式切换单元,用于当所述第十判断结果为所述电荷状态大于等于所述第二电荷状态预设值时,将无轨胶轮车的整车动力模式切换为纯电模式;
制动模式保持单元,用于当所述第十判断结果为所述电荷状态小于所述第二电荷状态预设值时,保持无轨胶轮车的整车动力模式为第二增程模式。
因本发明提供的无轨胶轮车的控制系统达到的技术效果与上述提供的无轨胶轮车的控制方法达到的技术效果相同,故在此不再进行赘述。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其他的附图。
图1为本发明提供的无轨胶轮车的控制方法的流程图;
图2为本发明实施例提供的无轨胶轮车的工作路线图;
图3为本发明实施例提供的无轨胶轮车的行驶工况图;
图4为本发明实施例提供的无轨胶轮车的控制方法的具体实施例流程图;
图5为本发明提供的无轨胶轮车的控制系统的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
本发明的目的是提供一种无轨胶轮车的控制方法和系统,以能够在使电池长期处于浅充浅放的工作区间的同时,控制发动机工作在高效、污染小的区间。
为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
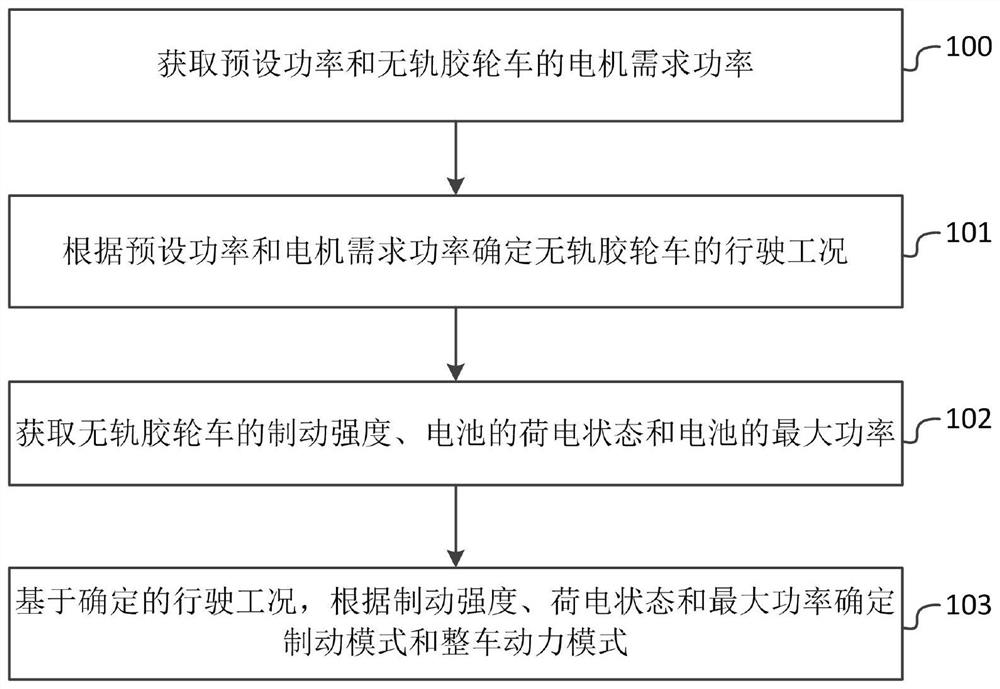
如图1所示,本发明提供的一种无轨胶轮车的控制方法,包括:
步骤100:获取预设功率和无轨胶轮车的电机需求功率。
步骤101:根据预设功率和电机需求功率确定无轨胶轮车的行驶工况。行驶工况包括:进入副平硐路段工况、驶出采区运输下山路段工况、运输大巷路段工况、工作面运输顺槽工况、驶出副平硐路段工况和驶入采区运输下山路段工况。
步骤102:获取无轨胶轮车的制动强度、电池的荷电状态和电池的最大功率。
步骤103:基于确定的行驶工况,根据制动强度、荷电状态和最大功率确定制动模式和整车动力模式。制动模式包括:混合制动模式、电机制动模式、机械制动模式。整车动力模式包括:第一增程模式、第二增程模式和纯电模式。
其中,为了对行驶工况进行精确划分,上述步骤101根据预设功率和电机需求功率确定无轨胶轮车的行驶工况的过程具体包括:
判断预设功率是否小于电机需求功率,得到第一判断结果。
当第一判断结果为预设功率小于电机需求功率时,判定行驶工况为进入副平硐路段工况或驶出采区运输下山路段工况。
当第一判断结果为预设功率大于等于电机需求功率时,判断预设功率是否等于电机需求功率,得到第二判断结果。
当第二判断结果为预设功率等于电机需求功率时,判定行驶工况为运输大巷路段工况或工作面运输顺槽工况。
当第二判断结果为预设功率不等于电机需求功率时,判定行驶工况为驶出副平硐路段工况或驶入采区运输下山路段工况。
进一步为了在使电池长期处于浅充浅放的工作区间的同时,控制发动机工作在高效、污染小的区间,上述步骤103基于确定的行驶工况,根据制动强度、荷电状态和最大功率确定制动模式和整车动力模式的过程具体包括:
获取第一电荷状态预设值、第二电荷状态预设值、第三电荷状态预设值和制动强度预设值。
当行驶工况为进入副平硐路段工况或驶出采区运输下山路段工况时,判断电荷状态是否小于等于第一电荷状态预设值,得到第三判断结果。
当第三判断结果为电荷状态小于等于第一电荷状态预设值时,判断自动强度是否小于等于制动强度预设值,得到第四判断结果。
当第四判断结果为自动强度小于等于制动强度预设值时,确定无轨胶轮车的制动模式为电机制动模式。
当第四判断结果为自动强度大于制动强度预设值时,确定无轨胶轮车的制动模式为混合制动模式。
当第三判断结果为电荷状态大于第一电荷状态预设值时,确定无轨胶轮车的制动模式为机械制动模式。
当行驶工况为运输大巷路段工况或工作面运输顺槽工况时,判断电荷状态是否小于等于第二电荷状态预设值,得到第五判断结果。
当第五判断结果为电荷状态小于等于第二电荷状态预设值时,判断电荷状态是否小于等于第三电荷状态预设值,得到第六判断结果。
当第六判断结果为电荷状态小于等于第三电荷状态预设值时,确定无轨胶轮车的整车动力模式为第二增程模式。
当第六判断结果为电荷状态大于第三电荷状态预设值时,确定无轨胶轮车的整车动力模式为第一增程模式。
当第五判断结果为电荷状态大于第二电荷状态预设值时,确定无轨胶轮车的整车动力模式为纯电模式。
当行驶工况为驶出副平硐路段工况或驶入采区运输下山路段工况时,判断电机需求功率是否大于等于电池的最大功率,得到第七判断结果。
当第七判断结果为电机需求功率大于等于电池的最大功率时,判断电荷状态是否小于等于第二电荷状态预设值,得到第八判断结果。
当第八判断结果为电荷状态小于等于第二电荷状态预设值时,确定无轨胶轮车的整车动力模式为第一增程模式。
当第八判断结果为电荷状态大于第二电荷状态预设值时,确定无轨胶轮车的整车动力模式为纯电模式。
当第七判断结果为电机需求功率小于电池的最大功率时,判断电荷状态是否小于第三电荷状态预设值,得到第九判断结果。
当第九判断结果为电荷状态小于第三电荷状态预设值时,确定无轨胶轮车的整车动力模式为第二增程模式。
当第九判断结果为电荷状态大于等于第三电荷状态预设值时,确定无轨胶轮车的整车动力模式为第一增程模式。
此外,为了进一步提高对无轨胶轮车制动模式的确定效果,在当第六判断结果为电荷状态小于等于第三电荷状态预设值时,确定无轨胶轮车的整车动力模式为第二增程模式之后,本发明提供的无轨胶轮车的控制方法还优选包括:
实时判断电荷状态是否大于等于第二电荷状态预设值,得到第十判断结果。
当第十判断结果为电荷状态大于等于第二电荷状态预设值时,将无轨胶轮车的整车动力模式切换为纯电模式。
当第十判断结果为电荷状态小于第二电荷状态预设值时,保持无轨胶轮车的整车动力模式为第二增程模式。
下面以井下增程式电动防爆无轨胶轮车为例对上述提供的控制方法的具体实施方式进行说明,在实际应用过程中,本发明提供的控制方法还适用于其他类型的混动无轨胶轮车。
如图2所示,井下增程式电动防爆无轨胶轮车的日常工作路线为:从坡角为-5°的副平硐进入,通过平顺的运输大巷,进入坡角为+15°的采区运输路段,此路段坡度较陡,无轨胶轮车所需功率较大,最后到达工作面运输顺槽,完成人员或设备的装卸后原路返回。
根据图2中无轨胶轮车的工作路线,设计如图3所示的增程式电动防爆无轨胶轮车行驶工况图。由于增程式电动防爆无轨胶轮车重量过大,所以限制其在井下行驶速度最大为40km/h。在副平硐路段和运输大巷保持40km/h的速度,行驶到采区运输上山段,坡度较陡,保持10km/h的爬坡速度,到达工作面运输顺槽后继续以20km/h的速度行驶,完成装卸任务后保持20km/h的速度原路返回,通过采区运输、运输大巷,到达副平硐后,保持30km/h的爬坡速度,完成一个行驶工况。针对此种工况,实施控制方法的具体流程如图4所示,以达到控制目标。
首先对图4中部分模块和参数进行解释:
纯电模式:该模式下,动力电池组作为唯一驱动车辆行驶的装置,增程式在该状态下处于关闭状态不进行工作。
第一增程模式(图4中增程模式1):此种模式下,动力电池组和增程器同时为驱动电机提供电能,增程器工作在特定高效区间。
第二增程模式(图4中增程模式2):此种模式下,电池组电量过低,电池继续放电会损坏电池,影响电池使用寿命。此种模式主要由增程器为驱动电机提供动力,同时为动力电池组充电。
机械制动:整车需求制动功率全部由机械制动功率提供,电机再生制动功率为零。
电机制动:整车需求制动功率全部由电机再生制动功率提供,机械制动功率为零。
混合制动:整车需求制动功率部分由机械制动功率提供,部分由电机再生制动功率提供。
电池SOC:电池荷电状态,其数值上定义为电池剩余容量占电池容量的比例。
Z:制动强度,本发明中假设驱动电机最大制动强度为0.2。
P
P
P
此控制方法主要根据增程式电动防爆无轨胶轮车实际行驶工况进行设计,主要根据工况条件的不同分为三个部分:副平硐(入)或采区运输上山(出)、运输大巷或工作面运输顺槽、副平硐(出)或采区运输上山(入)。控制方法将整车制动模式(或动力系统模式)分为:纯电模式、第一增程模式、第二增程模式、机械制动、电机制动和混合制动。
基于以上设置,如图4所示,具体实施该控制方法的步骤为:
步骤1:获取电机需求功率P
若判定工况路段在副平硐(入)或采取运输下山(出),跳转至步骤2。若判定工况路段在运输大巷或工作面运输顺槽,跳转至步骤3。若判定工况路段在副平硐(出)或采取运输下山(入),跳转至步骤4。
具体判定过程:若P
步骤2:获取实时电池SOC和制动强度Z判断整车制动模式。
由步骤1判定整车在副平硐(入)或采区运输上山(出)工况段,获取实时电池SOC值和制动强度Z,通过与设定的SOC限定值和电机最大制动强度值相比较,确定整车的制动模式,进而输出整车制动模式。
具体判定过程:此过程设定SOC限制最大值为0.9(即第一电荷状态预设值)。若SOC>0.9,则说明电池电量足够,此时不需进行能量回收,切换至机械制动模式。若SOC≤0.9,且Z≤0.2(即制动强度预设值),则说明电池可进行充电,且电机的制动强度足以满足整车需求,此条件下切换至电机制动模式。若SOC≤0.9,且Z>0.2,则说明电池可进行充电,但电机制动强度不足以满足整车需求,此时需要电机进行能量回收给动力电池充电,且仅仅依靠电机制动不足以满足整车的制动要求,因此切换至混合制动模式。
步骤3:获取实时电池SOC判断整车动力模式。
由步骤1判定整车在运输大巷或工作面运输顺槽工况段,获取实时电池SOC值,通过获取的SOC值与设定的SOC限定值相比较,确定整车动力模式,进而输出整车动力模式。
具体判定过程:此过程设定SOC限定值为0.5(第二电荷状态预设值)和0.3(第三电荷状态预设值)。若SOC>0.5,说明动力电池电量足够,则无轨胶轮车动力模式切换至纯电模式。若0.3≤SOC≤0.5,说明动力电池电量虽然不充足但没有到达最低限定值,动力电池停止工作且无需充电,此时增程器提供电机需求功率,切换至增程模式1。若SOC<0.3,说明电池电量小于最小限定值,此时需增程器提供电机需求功率的同时给动力电池充电,切换至增程模式2,充电至满足电池SOC≥0.5的条件下,切换至纯电模式。
步骤4:获取实时电池SOC和电机需求功率Preq判断整车动力模式。
由步骤1判定整车在副平硐(出)或采区运输上山(入)工况段,获取实时电池SOC值和电机需求功率P
具体判定过程:此过程设定SOC限定值为0.5和0.3。若P
基于以上具体实施过程,能够得到,本发明提供的无轨胶轮车的控制方法相对于现有技术具有以下优点:
1、相比传统防爆无轨胶轮车的单一能量管理策略,本发明提供的控制方法能够控制增程器中的发动机工作在高效率和低排放区间,节约能源的同时,大大降低了污染排放,优化了井下工作环境。
2、相对于纯电动防爆无轨胶轮车的单动力源的限制,本发明提供的控制方法能够控制动力电池组浅充浅放,在提高其续航里程的同时提高电池组寿命,维持动力电池组一致性和安全性能,避免电池安全问题给煤矿生产带来隐患。
3、相对于复合电源系统的纯电动防爆无轨胶轮车的多动力源能量管理策略,本发明提供的控制方法更具有针对性,更适用于井下工况。
此外,对应于上述提供的无轨胶轮车的控制方法,本发明还提供了一种无轨胶轮车的控制系统,如图5所示,该控制系统包括:第一获取模块51、行驶工况确定模块52、第二获取模块53和制动模式确定模块54。
其中,第一获取模块51用于获取预设功率和无轨胶轮车的电机需求功率。
行驶工况确定模块52用于根据预设功率和电机需求功率确定无轨胶轮车的行驶工况。行驶工况包括:进入副平硐路段工况、驶出采区运输下山路段工况、运输大巷路段工况、工作面运输顺槽工况、驶出副平硐路段工况和驶入采区运输下山路段工况。
第二获取模块53用于获取无轨胶轮车的制动强度、电池的荷电状态和电池的最大功率。
制动模式确定模块54用于基于确定的行驶工况,根据制动强度、荷电状态和最大功率确定制动模式和整车动力模式。制动模式包括:混合制动模式、电机制动模式、机械制动模式。整车动力模式包括:第一增程模式、第二增程模式和纯电模式。
进一步,上述行驶工况确定模块52优选包括:第一判断单元、第一行驶工况确定单元、第二判断单元、第二行驶工况确定单元和第三行驶工况确定单元。
其中,第一判断单元用于判断预设功率是否小于电机需求功率,得到第一判断结果。
第一行驶工况确定单元用于当第一判断结果为预设功率小于电机需求功率时,判定行驶工况为进入副平硐路段工况或驶出采区运输下山路段工况。
第二判断单元用于当第一判断结果为预设功率大于等于电机需求功率时,判断预设功率是否等于电机需求功率,得到第二判断结果。
第二行驶工况确定单元用于当第二判断结果为预设功率等于电机需求功率时,判定行驶工况为运输大巷路段工况或工作面运输顺槽工况。
第三行驶工况确定单元用于当第二判断结果为预设功率不等于电机需求功率时,判定行驶工况为驶出副平硐路段工况或驶入采区运输下山路段工况。
进一步,上述制动模式确定模块54优选包括:获取单元、第三判断单元、第四判断单元、第一制动模式确定单元、第二制动模式确定单元、第三制动模式确定单元、第五判断单元、第六判断单元、第四制动模式确定单元、第五制动模式确定单元、第六制动模式确定单元、第七判断单元、第八判断单元、第七制动模式确定单元、第八制动模式确定单元、第九判断单元、第十制动模式确定单元和第十一制动模式确定单元。
其中,获取单元用于获取第一电荷状态预设值、第二电荷状态预设值、第三电荷状态预设值和制动强度预设值。
第三判断单元用于当行驶工况为进入副平硐路段工况或驶出采区运输下山路段工况时,判断电荷状态是否小于等于第一电荷状态预设值,得到第三判断结果。
第四判断单元用于当第三判断结果为电荷状态小于等于第一电荷状态预设值时,判断自动强度是否小于等于制动强度预设值,得到第四判断结果。
第一制动模式确定单元用于当第四判断结果为自动强度小于等于制动强度预设值时,确定无轨胶轮车的制动模式为电机制动模式。
第二制动模式确定单元用于当第四判断结果为自动强度大于制动强度预设值时,确定无轨胶轮车的制动模式为混合制动模式。
第三制动模式确定单元用于当第三判断结果为电荷状态大于第一电荷状态预设值时,确定无轨胶轮车的制动模式为机械制动模式。
第五判断单元用于当行驶工况为运输大巷路段工况或工作面运输顺槽工况时,判断电荷状态是否小于等于第二电荷状态预设值,得到第五判断结果。
第六判断单元用于当第五判断结果为电荷状态小于等于第二电荷状态预设值时,判断电荷状态是否小于等于第三电荷状态预设值,得到第六判断结果。
第四制动模式确定单元用于当第六判断结果为电荷状态小于等于第三电荷状态预设值时,确定无轨胶轮车的整车动力模式为第二增程模式。
第五制动模式确定单元用于当第六判断结果为电荷状态大于第三电荷状态预设值时,确定无轨胶轮车的整车动力模式为第一增程模式。
第六制动模式确定单元用于当第五判断结果为电荷状态大于第二电荷状态预设值时确定无轨胶轮车的整车动力模式为纯电模式。
第七判断单元用于当行驶工况为驶出副平硐路段工况或驶入采区运输下山路段工况时,判断电机需求功率是否大于等于电池的最大功率,得到第七判断结果。
第八判断单元用于当第七判断结果为电机需求功率大于等于电池的最大功率时,判断电荷状态是否小于等于第二电荷状态预设值,得到第八判断结果。
第七制动模式确定单元用于当第八判断结果为电荷状态小于等于第二电荷状态预设值时,确定无轨胶轮车的整车动力模式为第一增程模式。
第八制动模式确定单元用于当第八判断结果为电荷状态大于第二电荷状态预设值时,确定无轨胶轮车的整车动力模式为纯电模式。
第九判断单元用于当第七判断结果为电机需求功率小于电池的最大功率时,判断电荷状态是否小于第三电荷状态预设值,得到第九判断结果。
第十制动模式确定单元用于当第九判断结果为电荷状态小于第三电荷状态预设值时,确定无轨胶轮车的整车动力模式为第二增程模式。
第十一制动模式确定单元用于当第九判断结果为电荷状态大于等于第三电荷状态预设值时,确定无轨胶轮车的整车动力模式为第一增程模式。
进一步,上述制动模式确定模块54还可以包括:第十判断单元、制动模式切换单元和制动模式保持单元。
其中,第十判断单元用于实时判断电荷状态是否大于等于第二电荷状态预设值,得到第十判断结果。
制动模式切换单元用于当第十判断结果为电荷状态大于等于第二电荷状态预设值时,将无轨胶轮车的整车动力模式切换为纯电模式。
制动模式保持单元用于当第十判断结果为电荷状态小于第二电荷状态预设值时,保持无轨胶轮车的整车动力模式为第二增程模式。
本说明书中各个实施例采用递进的方式描述,每个实施例重点说明的都是与其他实施例的不同之处,各个实施例之间相同相似部分互相参见即可。对于实施例公开的系统而言,由于其与实施例公开的方法相对应,所以描述的比较简单,相关之处参见方法部分说明即可。
本文中应用了具体个例对本发明的原理及实施方式进行了阐述,以上实施例的说明只是用于帮助理解本发明的方法及其核心思想;同时,对于本领域的一般技术人员,依据本发明的思想,在具体实施方式及应用范围上均会有改变之处。综上所述,本说明书内容不应理解为对本发明的限制。
- 无轨胶轮车智能车载系统、井下车辆调度系统和控制方法
- 一种无轨胶轮车的控制方法和系统