一种用于水下作业训练的大型机械臂
文献发布时间:2023-06-19 12:02:28
技术领域
本发明属于特种机器人技术领域,尤其涉及一种用于水下作业训练的大型机械臂。
背景技术
水下机械臂是特种环境机器人的一类,在水下训练、潜水作业、深海探测中有所应用。水下环境的特殊性对多自由度的机械臂带来诸多的挑战,譬如如何克服运动过程中水的阻力,如何高实现可靠的流体密封,如何在长期服役中实现防锈防腐蚀,如果实现水下高安全性等。
目前,美国航天航天局(NASA)在其中性浮力实验室(NBL)建造了全尺寸的空间机械臂(SSMS和SSRMS)的水下机械臂,用于空间机械臂的试验和训练任务,采用了水压驱动的方式。俄罗斯加加林中心水槽配置了2自由度水下机械臂,用于航天员水下失重模拟环境作为训练,采用了手动人力操控的驱动方式。目前应用于水下探测、抓取作业的水下机械臂多为展开长度不超过5米的小型机械臂系统。据目前公开资料来看,国内还没有相关单位开展展开长度超过10米水下大型机械臂的研制。
发明内容
本发明的技术解决问题:克服现有技术的不足,提供一种用于水下作业训练的大型机械臂,主要应用于中性浮力失重模拟环境中的空间机械臂作业训练,可支持空间机械臂水下试验模拟验证、水下训练、水下作业,并可在水下环境可靠、安全、长期运行,具备高冗余度和良好的密封性。
为了解决上述技术问题,本发明公开了一种用于水下作业训练的大型机械臂,包括:水下基座、多个关节结构、臂杆结构Ⅰ、臂杆结构Ⅱ和末端执行器;其中,多个关节结构,包括:肩回转关节、肩俯仰关节、肘俯仰关节、腕俯仰关节、腕偏航关节和腕回转关节;
肩回转关节、肩俯仰关节、臂杆结构Ⅰ、肘俯仰关节、臂杆结构Ⅱ、腕俯仰关节、腕偏航关节、腕回转关节和末端执行器依次连接;其中,肩回转关节竖直安装在水下基座上,肩回转关节与肩俯仰关节正交设置,肩俯仰关节与臂杆结构Ⅰ正交设置,臂杆结构Ⅰ与肘俯仰关节正交设置,肘俯仰关节与臂杆结构Ⅱ正交设置,臂杆结构Ⅱ与腕俯仰关节正交设置,腕俯仰关节与腕偏航关节正交设置,腕偏航关节与腕回转关节正交设置,腕回转关节与末端执行器同轴设置。
在上述用于水下作业训练的大型机械臂中,还包括:肩部相机;其中,肩部相机通过支架安装在水下基座上。
在上述用于水下作业训练的大型机械臂中,还包括:肘部相机;其中,肘部相机螺接安装在肘俯仰关节侧面。
在上述用于水下作业训练的大型机械臂中,还包括:腕部相机和末端避障传感器;其中,腕部相机和末端避障传感器螺接安装在末端执行器上。
在上述用于水下作业训练的大型机械臂中,各关节结构的传动结构相同,包括:直流无刷伺服电机、直角行星减速器、齿轮Ⅰ、齿轮Ⅱ、减速器、绝对位置传感器、输出轴、下框盖、角接触球轴承、下框体、上框体、上框盖、控制器、中空轴、中框体、动密封结构Ⅰ和电连接器;其中,齿轮Ⅰ的直径小于齿轮Ⅱ的直径;
直流无刷伺服电机集成旋变及抱闸,直流无刷伺服电机与直角行星减速器连接,再通过齿轮Ⅰ和齿轮Ⅱ将旋转运动传到减速器的输入端;减速器的输出端将旋转运动传到输出轴;输出轴与中框体之间由一对角接触球轴承支撑,并通过下框盖与下框体形成一体结构;下框体与上框体之通过动密封结构Ⅰ连接;输出轴与中空轴连接,绝对位置传感器固定在中空轴上;控制器安装在关节输入端的上框盖上,电连接器安装在下框盖上,控制器与电连接器之间的电缆通过中空轴连接;其中,绝对位置传感器用于对关节结构的旋转角度和位置数据进行采集。
在上述用于水下作业训练的大型机械臂中,动密封结构Ⅰ,包括:静套、动套、动密封圈Ⅰ、动密封圈Ⅱ、静密封圈Ⅰ和静密封圈Ⅱ;
静套安装在中框体上,动套安装在下框体上;其中,静套与中框体之间设置有静密封圈Ⅰ,动套与下框体之间设置有静密封圈Ⅱ;
静套与动套嵌套安装,形成密封圈槽体和油槽;动密封圈Ⅰ和动密封圈Ⅱ位于密封圈槽体内、油槽左右两侧。
在上述用于水下作业训练的大型机械臂中,肘俯仰关节,包括:肘关节外壳、动密封结构Ⅱ、浮力外壳Ⅰ、机械限位挡块和传动结构;
传动结构位于肘关节外壳内;
肘俯仰关节的输入输出旋转界面布置有动密封结构Ⅱ和机械限位挡块;
浮力外壳Ⅰ外形与肘关节外壳相匹配,包裹在肘关节外壳外侧,实现肘俯仰关节的独立中性浮力配平状态。
在上述用于水下作业训练的大型机械臂中,腕俯仰关节、腕偏航关节和腕回转关节之间通过法兰连接,腕俯仰关节、腕偏航关节和腕回转关节的壳体外侧包裹有浮力外壳Ⅱ,实现腕俯仰关节、腕偏航关节和腕回转关节在水中处于中性浮力配平状态。
在上述用于水下作业训练的大型机械臂中,臂杆结构Ⅰ和臂杆结构Ⅱ的结构相同,包括:臂杆杆体、浮力外壳Ⅲ、输入法兰和输出法兰;
臂杆杆体上开设有多个通孔,水通过多个通孔进入臂杆杆体内部;浮力外壳Ⅲ包裹在臂杆杆体外侧,在水中处于中性浮力配平状态;输入法兰和输出法兰分别设置在臂杆杆体两端,用于与相应的关节结构螺接。
在上述用于水下作业训练的大型机械臂中,肘部相机,包括:云台、相机和照明灯;其中,云台、相机和照明灯安装在肘俯仰关节侧面。
本发明具有以下优点:
(1)本发明公开了一种用于水下作业训练的大型机械臂,配置肩、肘、腕三种关节结构,关节结构传动比大、刚度高、设计紧凑;在自身惯量大、运动水阻大、末端负载大的工况下,可实现大力矩稳定运动;在展开长度较长、长细比较大的情况下,结构变形量小,末端精度高。
(2)本发明公开了一种用于水下作业训练的大型机械臂,臂杆结构、肘关节、腕关节采用部件独立中性浮力配平方案使机械臂本体在水下达到重力与浮力平衡,实现失重环境的模拟。且浮力材料与结构功能一体化设计,即浮力材料外壳与本体结构融洽贴合,使得达到配平的同时不影响机械臂的正常运动。
(3)本发明公开了一种用于水下作业训练的大型机械臂,在运动部件的旋转界面设置了多重相互冗余的动密封结构,可实现水下环境中可靠的运动密封。
(4)本发明公开了一种用于水下作业训练的大型机械臂,与水接触的主体外壳采用了钛合金,可保证长期在水下工作不发生腐蚀和生锈。
附图说明
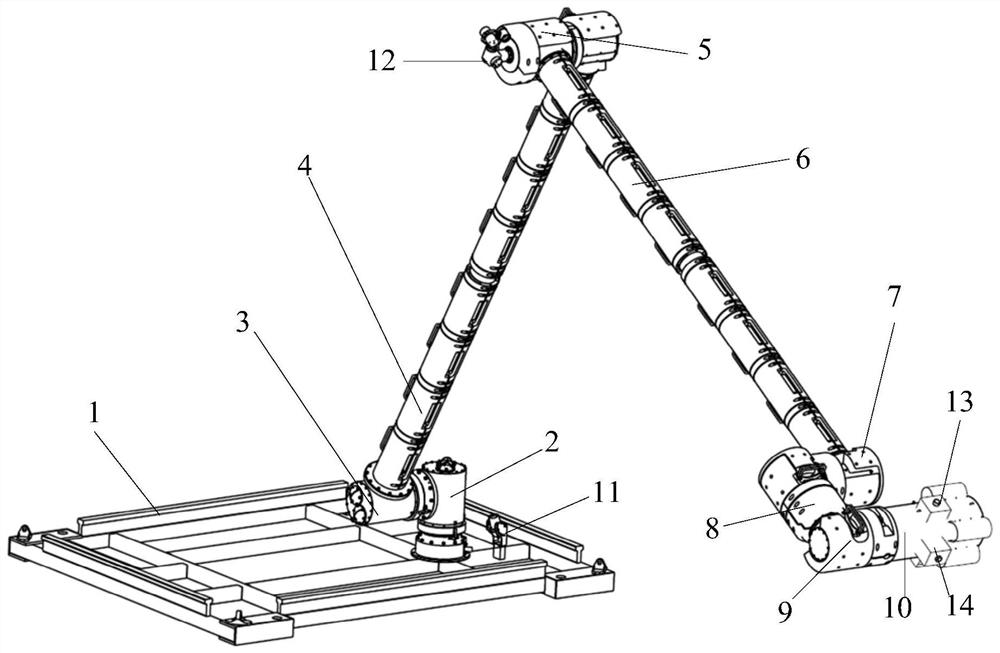
图1是本发明实施例中一种用于水下作业训练的大型机械臂的结构示意图;
图2是本发明实施例中一种关节结构的结构示意图;
图3是本发明实施例中一种动密封结构的结构示意图;
图4是本发明实施例中一种肘俯仰关节的结构示意图;
图5是本发明实施例中一种腕俯仰关节、腕偏航关节和腕回转关节的连接示意图;
图6是本发明实施例中一种臂杆结构的结构示意图。
具体实施方式
为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明公开的实施方式作进一步详细描述。
本发明公开了一种用于水下作业训练的大型机械臂,采用“2肩+1肘+3腕”配置方案,肩部设置肩回转关节和肩俯仰关节,肘部设置肘俯仰关节,腕部依次设置腕俯仰关节、腕偏航关节和腕回转关节;各关节采用偏置结构,可满足大运动范围要求;各关节采用模块化设计,即肩回转关节和肩俯仰关节采用相同结构模式,肘俯仰关节采用一种结构模式,腕俯仰关节、腕偏航关节和腕回转关节采用相同结构模式。进一步的,设置两个臂杆结构用来连接与支撑肩部关节与肘部关节以及腕部关节,实现机电连接以组成完整的机械臂。
如图1,该用于水下作业训练的大型机械臂,包括:水下基座1、多个关节结构、臂杆结构Ⅰ4、臂杆结构Ⅱ6和末端执行器10。其中,多个关节结构分别为:肩回转关节2、肩俯仰关节3、肘俯仰关节5、腕俯仰关节7、腕偏航关节8和腕回转关节9。
在本实施例中,肩回转关节2、肩俯仰关节3、臂杆结构Ⅰ4、肘俯仰关节5、臂杆结构Ⅱ6、腕俯仰关节7、腕偏航关节8、腕回转关节9和末端执行器10依次连接。其中,肩回转关节2竖直安装在水下基座1上,肩回转关节2与肩俯仰关节3正交设置,肩俯仰关节3与臂杆结构Ⅰ4正交设置,臂杆结构Ⅰ4与肘俯仰关节5正交设置,肘俯仰关节5与臂杆结构Ⅱ6正交设置,臂杆结构Ⅱ6与腕俯仰关节7正交设置,腕俯仰关节7与腕偏航关节8正交设置,腕偏航关节8与腕回转关节9正交设置,腕回转关节9与末端执行器10同轴设置。
在本实施例中,该用于水下作业训练的大型机械臂还包括:肩部相机11、肘部相机12、腕部相机13和末端避障传感器14。其中,肩部相机11通过支架安装在水下基座1上,肘部相机12螺接安装在肘俯仰关节5侧面,腕部相机13安装在末端执行器10上,各相机具有视频监视功能。末端避障传感器14螺接安装在末端执行器10上,可用于机械臂与操作对象及水池环境的末端距离检测和报警。
在本实施例中,各关节结构(如,肩回转关节2、肩俯仰关节3、肘俯仰关节5、腕俯仰关节7、腕偏航关节8和腕回转关节9)均包含有一传动结构,且传动结构的具体结构形式基本一致。
如图2,传动结构具体可以包括:直流无刷伺服电机101、直角行星减速器102、齿轮Ⅰ103、齿轮Ⅱ104、减速器105、绝对位置传感器106、输出轴107、下框盖108、角接触球轴承109、下框体110、上框体111、上框盖112、控制器113、中空轴114、中框体115、动密封结构Ⅰ116和电连接器117。其中,齿轮Ⅰ103的直径小于齿轮Ⅱ104的直径;直流无刷伺服电机101集成旋变及抱闸,直流无刷伺服电机101与直角行星减速器102连接,再通过齿轮Ⅰ103和齿轮Ⅱ104将旋转运动传到减速器105的输入端;减速器105的输出端将旋转运动传到输出轴107;输出轴107与中框体115之间由一对角接触球轴承109支撑,并通过下框盖108与下框体110形成一体结构;下框体110与上框体111之通过动密封结构Ⅰ116连接;输出轴107与中空轴114连接,绝对位置传感器106固定在中空轴114上;控制器113安装在关节输入端的上框盖112上,电连接器117安装在下框盖108上,控制器113与电连接器117之间的电缆通过中空轴114连接。其中,绝对位置传感器106用于对关节结构的旋转角度和位置数据进行采集。
进一步的,如图3,动密封结构Ⅰ116具体可以包括:静套501、动套502、动密封圈Ⅰ5031、动密封圈Ⅱ5032、静密封圈Ⅰ5081和静密封圈Ⅱ5082。其中,静套501安装在中框体115上,动套502安装在下框体110上;静套501与中框体115之间设置有静密封圈Ⅰ5081,动套502与下框体110之间设置有静密封圈Ⅱ5082;静套501与动套502嵌套安装,形成密封圈槽体和油槽504;动密封圈Ⅰ5031和动密封圈Ⅱ5032位于密封圈槽体内、油槽504左右两侧。其中,动密封结构内部的两道动密封子结构具有相互冗余的作用。
在本实施例中,该用于水下作业训练的大型机械臂包含了关节等回转运动的部组件,并且在关节内部还有电机、旋转编码器、关节控制器等电子元器件,关节的密封性能直接决定了水下机械臂的可靠性和安全性。因此,在肩关节、肘关节、腕关节的旋转界面均设置了结构形式类似的动密封结构。
优选的,如图4,肘俯仰关节5具体可以包括:肘关节外壳201、动密封结构Ⅱ202、浮力外壳Ⅰ203、机械限位挡块204和前述的传动结构。其中,传动结构位于肘关节外壳201内;肘俯仰关节5的输入输出旋转界面布置有动密封结构Ⅱ202和机械限位挡块204;浮力外壳Ⅰ203外形与肘关节外壳201相匹配,包裹在肘关节外壳201外侧,实现肘俯仰关节5的独立中性浮力配平状态。
进一步的,肘部相机12具体可以包括:云台205、相机206和照明灯207;其中,云台205、相机206和照明灯207安装在肘俯仰关节5侧面。
在本实施例中,如图5,腕俯仰关节7、腕偏航关节8和腕回转关节9之间通过法兰连接,腕俯仰关节7、腕偏航关节8和腕回转关节9的壳体外侧包裹有浮力外壳Ⅱ404,可实现腕俯仰关节7、腕偏航关节8和腕回转关节9在水中处于中性浮力配平状态。
在本实施例中,如图6,臂杆结构Ⅰ4与臂杆结构Ⅱ6的结构相同,均包括:臂杆杆体301、浮力外壳Ⅲ302、输入法兰303和输出法兰304。其中,臂杆杆体301上开设有多个通孔,水通过多个通孔进入臂杆杆体301内部;浮力外壳Ⅲ302包裹在臂杆杆体301外侧,在水中处于中性浮力配平状态;输入法兰303和输出法兰304分别设置在臂杆杆体301两端,用于与相应的关节结构螺接。可见,臂杆结构在水中处于中性浮力配平状态,为降低臂杆结构的质量并满足浮力配平要求,采用开孔配平方案,水可以进入臂杆杆体内部,臂杆杆体外包裹浮力外壳达到中性浮力配平状态。臂杆杆体可采用钛合金制备得到,钛合金具有良好耐蚀性,可保证臂杆结构长期在水下工作不发生腐蚀和生锈。浮力外壳可采用泡沫浮力材料,具备低密度、低吸水率等特点。
本发明虽然已以较佳实施例公开如上,但其并不是用来限定本发明,任何本领域技术人员在不脱离本发明的精神和范围内,都可以利用上述揭示的方法和技术内容对本发明技术方案做出可能的变动和修改,因此,凡是未脱离本发明技术方案的内容,依据本发明的技术实质对以上实施例所作的任何简单修改、等同变化及修饰,均属于本发明技术方案的保护范围。
本发明说明书中未作详细描述的内容属于本领域专业技术人员的公知技术。
- 一种用于水下作业训练的大型机械臂
- 一种用于浅水水下作业的长距离机械臂装置