三相永磁同步电机的初始位置辨识方法
文献发布时间:2023-06-19 12:02:28
技术领域
本发明涉及永磁同步电机控制领域,具体涉及一种电机的初始位置辨识的方法。
背景技术
无速度或无位置传感器的永磁同步电机是当前永磁同步电机研究的一个热点,也是永磁同步电机驱动系统的发展趋势之一,具有潜在的竞争优势。但是,无速度或位置传感器的三相永磁同步电机和无刷直流电机的初始位置辨识一直是学术界和工业界的难点。
总体来说,现有技术中对电机初始位置的判断方法主要分为两类:第一类是在启动的瞬间,注入脉冲序列,根据永磁电机的磁路饱和特性以及交直轴的磁阻不一致,而辨识电机的初始位置;例如中国专利文献CN110932636A公开了一种永磁同步电机初始位置辨识方法及系统,所述方法包括在电流闭环模式下,设定目标参数,根据目标参数,进行正向震荡角度辨识和负向震荡角度辨识,分别得到第一脉冲数组和第二脉冲数组,对第一脉冲数组和第二脉冲数组进行合理性检验以及均值回归算法计算,得到电机零位初始位置,对电机零位初始位置进行检测;虽然注入脉冲序列的优点是辨识时间短也比较准确,但辨识的整个过程中电机必须静止不动,少许的扰动都会影响最终的位置准确性,特别是磁场极性(N/S极的判断)本身是磁路饱和来进行的,非常受电机扰动的干扰而做出误判,而且辨识过程中会有一个明显的噪音,注入脉冲系列本身容易对电机位置产生移动。
第二类是高频注入的方案,根据电机的阻抗特性在高频时把电阻的影响越来越小,电机的电感特性差异会显得很突出;高频注入的优势是可以在线辨识,但辨识时间长,效率低,精度差而且会产生高频噪音,启动力矩也小,注入的信号中很大部分注定用来辨识位置,而无法做功。
此外,也有一些利用反电势进行检测的方法,例如中国专利文献CN101425769A公开了快速检测无位置传感器三相永磁同步电机转子位置的方法,采用三相反电势之间归一化方法,通过对归一化后绝对值最小相反电势值插值比较确定最接近的点对应转子位置曲线中的转子位置;但这种方法比较需要启动电机,已经不是三相永磁同步电机的初始位置辨识范畴了。
发明内容
本发明的目的是提供一种三相永磁同步电机的初始位置辨识方法,通过三相反电势信号的反馈,判断电机的初始位置,解决背景技术中的问题,填补现有技术的空白。
为了实现上述目的,本发明提供以下以技术方案:
三相永磁同步电机的初始位置辨识方法,所述三相永磁同步电机的三相的至少一相连接反电势检测电路,通过反电势检测电路的反馈值判断三相永磁同步电机的转动角度,从而辨识其初始位置。
进一步地,所述三相永磁同步电机的开关电路包括六个IGBT/MOSFET管、至少一个反电势检测电路和至少一个电容。
进一步地,所述永磁同步电机启动时,所述开关电路的六个IGBT/MOSFET管必须为关闭状态。
进一步地,所述反电势检测电路连接在每相的其中一个IGBT/MOSFET管和分压电阻两端。
进一步地,所述反电势检测电路包括两个分压电阻,反电势检测电路的反馈端设置在两个分压电阻之间,分别为反电势反馈端ea、反电势反馈端eb和反电势反馈端ec,分别对应所述永磁同步电机的a相、b相和c相。
当永磁同步电机启动,IGBT/MOSFET管必须为关闭状态时,导体切割磁力线必将产生电势e,
e=blv;
其中,b是磁场强度,l是导线长度,v是导线切割磁力线的速度。
由于续流二极管的存在,反电势反馈端ea、反电势反馈端eb和反电势反馈端ec的值为负数时将会被续流二极管强行拉至反电势零点。
进一步地,所述初始位置辨识方法为:根据反电势反馈端ea、反电势反馈端eb和反电势反馈端ec中的任一反馈端反馈的反电势过反电势零点和反电势最大值点的所转动的角度判断初始位置。
进一步地,根据反电势反馈端ea、反电势反馈端eb和反电势反馈端ec的反电势过反电势零点顺序,判断所述永磁同步电机的初始转向。
进一步地,如果反电势反馈端所反馈的反电势按照同样逻辑先经过反电势零点或反电势最大值点的顺序为ea、eb、ec,则所述永磁同步电机的转向为a→b→c;
如果是反电势反馈端所反馈的反电势按照同样逻辑先经过反电势零点或反电势最大值点的顺序为ea、ec、eb,则所述永磁同步电机的转向为a→c→b。
本发明的有益效果如下:(1)本发明通过开关关闭时检测反电势,可以迅速有效地找到电机的准确位置,可以完全克服目前业界常规注入脉冲或高频信号带来的种种弊端。(2)本发明只需要任一相就可以判断转子位置,只需要两相就可以迅速判断电机的转向及位置,但三相检测实现起来更简单更快捷。
附图说明
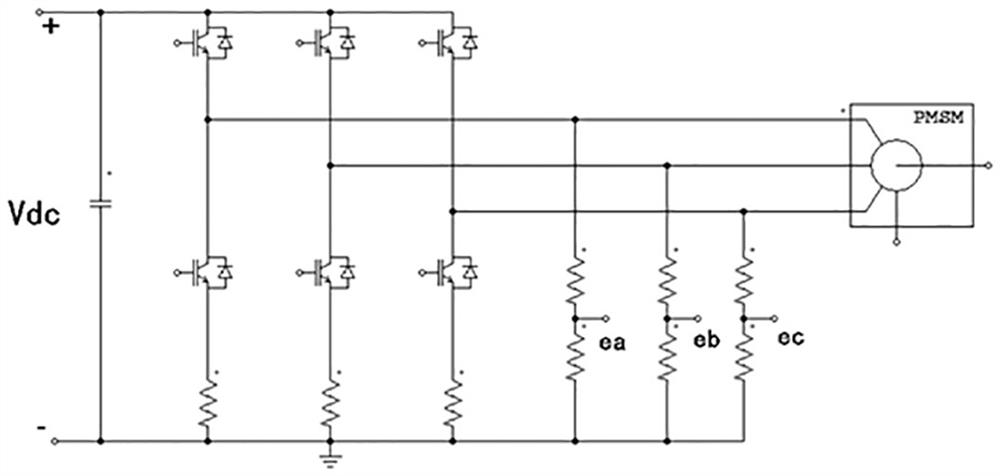
图1是本发明的开关电路与永磁同步电机三相连接图。
图2是发明具体实施例的反电势信号直接接入MCU芯片的反电势波形图。
具体实施方式
以下结合附图对本发明的具体实施方式做详细描述,应当指出的是,实施例只是对发明的具体阐述,不应视为对发明的限定,实施例的目的是为了让本领域技术人员更好地理解和再现本发明的技术方案,本发明的保护范围仍应当以权利要求书所限定的范围为准。
如图1所示,图中PMSM表示永磁同步电机。
本发明提供一种永磁同步电机的初始位置辨识方法,所述方法在所述三相永磁同步电机的三相位中的至少一相连接反电势检测电路,通过反电势检测电路的反馈值判断三相永磁同步电机的转动角度,从而辨识其初始位置。在一些优选的方案中,可以在三相都分别连接一个反电势检测电路,每个反电势检测电路均配置一个反电势反馈端,从该端可以接收到反电势检测电路的反馈值。
如图1所示,所述三相永磁同步电机的外围开关电路包括六个IGBT/MOSFET管、至少一个反电势检测电路和至少一个电容。
所述反电势检测电路连接在每相的其中一个IGBT/MOSFET管和分压电阻两端,所述反电势检测电路包括至少两个分压电阻,反电势检测电路的反馈端设置在两个分压电阻之间,分别为反电势反馈端ea、反电势反馈端eb和反电势反馈端ec,分别对应所述永磁同步电机的a相、b相和c相。
当永磁同步电机启动,IGBT/MOSFET管必须为关闭状态时,导体切割磁力线必将产生电势e,
e=blv;
其中,b是磁场强度,l是导线长度,v是导线切割磁力线的速度。
由于续流二极管的存在,反电势反馈端ea、反电势反馈端eb和反电势反馈端ec的反电势值为负数时将会被续流二极管强行拉至反电势零点。
所述初始位置辨识方法为:设所述永磁同步电机三相中的a相所 在的初始位置为反电势零点参考点θ
由物理知识可知,当导体与磁力线垂直呈90°时,才会产生最大 的电势e=blv,因此,根据任意反电势反馈端所反馈的反电势过反电 势最大值点所对应的转动角度θ
根据反电势反馈端ea、反电势反馈端eb和反电势反馈端ec的反电势过反电势零点顺序,判断所述永磁同步电机的转向,具体判断方法为:
如果是反电势反馈端ea和反电势反馈端eb的反电势先经过反电势零点,则所述永磁同步电机的转向为a→b→c;
如果是反电势反馈端ea和反电势反馈端ec的反电势先经过反电势零点,则所述永磁同步电机的转向为a→c→b。
如图2所示为一个具体的实施例中所采集到的反电势的波形图, 其中,横坐标表示转动角度,纵坐标表示反电势的值,在图2所示的 实施例中,反电势反馈端eb的值过反电势零点和反电势最大值点, 分别是E点和F点,其中F点时转子位置正对着b相,也即 θ
图2所示实施例中的E点,三相永磁同步电机的转子初始位置(转 子角度)为60°/300°方向。
图2为反电势信号直接接入MCU芯片,有些应用条件下反电势信号会接入运算放大器,运算放大器本身有偏置,这种情况下,图2波形会有区别。
综上,则永磁同步电机的初始位置在永磁同步电机三相中的a相 转向c相的30°方向。
此外,本发明的上述方法也同样适用于无刷直流电机(BLDC)。
尽管已描述了本申请的优选实施例,但本领域内的技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本申请范围的所有变更和修改。
- 三相永磁同步电机的初始位置辨识方法
- 一种永磁同步电机转子初始位置辨识方法