一种大气湍流下的光斑中心滑动加权质心定位方法
文献发布时间:2023-06-19 12:02:28
技术领域
本发明属于无线光通信光束自动捕获、定位及跟踪技术所需的光斑图像分析处理领域,具体涉及一种大气湍流下的光斑中心滑动加权质心定位方法。
背景技术
光斑中心定位是指激光光斑能量中心位置的精确定位技术,它是一项光学测量中常用的关键技术,广泛应用于激光通信、目标跟踪、武器系统、激光雷达、激光测距领域;大气激光通信中,激光经过湍流的大气后会发生光束漂移、扩展和光强起伏等现象,导致接收端探测到不同程度的畸变光斑,而快速、精确定位成像光斑的中心,是激光通信的关键技术之一,激光光斑定位准确性以及精度直接决定了通信质量以及链路的稳定性。
传统的光斑定位方法
发明内容
本发明的目的是提出一种大气湍流下的光斑中心滑动加权质心定位方法,这种定位方法对受湍流环境下的畸变光斑图像定位稳定性高,定位效果好。
本发明所采用的技术方案是,一种大气湍流下的光斑中心滑动加权质心定位方法,具体按照以下步骤实施:
步骤1:将CCD采集到的光斑图像逐帧保存并进行归一化处理,逐帧读入图像后开始叠加图像处理,生成每帧当前图像A的当前帧参考图像B;
步骤2:对当前图像A进行预处理;
步骤3:使用非线性权重质心法对当前帧图像A进行粗定位,得到当前帧图像A的粗定位点(x
步骤4:将上一帧图像的当前帧参考图像B
步骤5:由向量r对由步骤3得到的粗定位点(x
本发明的特征还在于,
步骤1具体按照以下步骤实施:
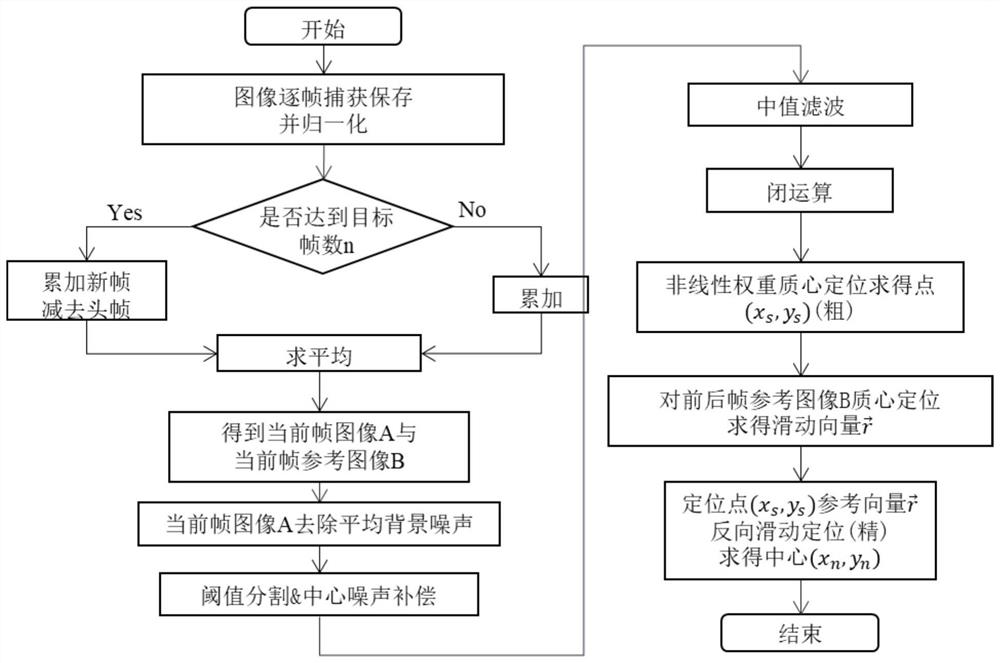
将CCD采集到的光斑图像逐帧保存并进行归一化处理,逐帧读入图像,开始叠加图像,设置叠加图像的帧数上限值为n;当叠加帧数没达到n帧时,依次读入当前帧图像A逐帧叠加后求像素灰度平均值,生成当前帧参考图像B,当帧数达到n帧时,减去头帧,加上当前新帧图像后再求平均,逐次类推,生成每一张当前帧图像A的当前帧参考图像B,具体处理流程见图1。
步骤2具体按照以下步骤实施:
步骤2.1,对当前帧参考图像B求得阈值为V
其中,M
由式(3)求得R
阈值V
步骤2.2,去背景操作:对当前帧图像A减去由当前帧参考图像B得到的平均背景噪声大小k,II
II
由公式(4)得到的当前帧图像A的去背景图像,由公式(5)求得当前帧图像A去背景后图像的阈值V
其中,M
由式(7)求得R
然后进行阈值分割处理、同时对光斑中心进行噪声补偿处理,保留光斑中心有效灰度信息II
然后再进行中值滤波,最后进行闭运算处理,得到预处理后的当前帧图像A。
步骤3中,使用非线性权重质心定位算法得到当前帧图像的粗定位点(x
式中,x
步骤4中,当前帧参考图像B
其中,g
当前帧参考图像B
其中,g
根据公式(10)及公式(11)得到光斑整体移动向量r,r=(x
步骤5中,精定位点(x
本发明的有益效果是:本发明方法通过对畸变的光斑图像利用非线性权重质心定位算法
附图说明
图1是本发明一种大气湍流下的光斑中心滑动加权质心定位方法的流程图;
图2是本发明实施例中举例当前帧图像A;
图3是本发明实施例中举例当前帧参考图像B;
图4是本发明实施例中举例当前帧参考图像B取阈值后图像;
图5是本发明实施例中举例当前帧图像A预处理后图像;
图6是本发明实施例中举例上一帧参考图像B
图7是本发明实施例举例当前帧参考图像B
图8是本发明实施例举例当前帧图像A预处理后定位图像;
图9是滑动加权质心定位算法下10KM光斑图像间定位间距;
图10是非线性权重质心定位算法下10KM光斑图像间定位间距;
图11是质心定位算法下10KM光斑图像间定位间距;
图12是形心定位算法下10KM光斑图像间定位间距;
图13是滑动加权质心定位算法下10KM光斑图像取掩膜内像素强度;
图14是非线性权重质心定位算法下10KM光斑图像取掩膜内像素强度;
图15是质心定位算法下10KM光斑图像取掩膜内像素强度;
图16是形心定位算法下10KM光斑图像取掩膜内像素强度。
具体实施方式
下面结合附图和具体实施方式对本发明进行详细说明。
本发明一种大气湍流下的光斑中心滑动加权质心定位方法,具体按照以下步骤实施:
步骤1:将CCD采集到的光斑图像逐帧保存并进行归一化处理,逐帧读入图像后开始叠加图像处理,生成每帧当前图像A的当前帧参考图像B;步骤1具体按照以下步骤实施:
将CCD采集到的光斑图像逐帧保存并进行归一化处理,逐帧读入图像,开始叠加图像,设置叠加图像的帧数上限值为n(此处令n取10);当叠加帧数没达到n帧时,依次读入当前帧图像A逐帧叠加后求像素灰度平均值,生成当前帧参考图像B,当帧数达到n帧时,减去头帧,加上当前新帧图像后再求平均,逐次类推,生成每一张当前帧图像A的当前帧参考图像B,具体处理流程见图1。
步骤2:对当前图像A进行预处理;
步骤2具体按照以下步骤实施:
步骤2.1,对当前帧参考图像B求得阈值为V
其中,M
由式(3)求得R
阈值V
步骤2.2,去背景操作:对当前帧图像A减去由当前帧参考图像B得到的平均背景噪声大小k,II
II
由公式(4)得到的当前帧图像A的去背景图像,由公式(5)求得当前帧图像A去背景后图像的阈值V
其中,M
由式(7)求得R
然后进行阈值分割处理、同时对光斑中心进行噪声补偿处理,保留光斑中心有效灰度信息II
然后再进行中值滤波,最后进行闭运算处理,得到预处理后的当前帧图像A。
步骤3:使用非线性权重质心法对当前帧图像A进行粗定位,得到当前帧图像A的粗定位点(x
步骤3中,使用非线性权重质心定位算法得到当前帧图像的粗定位点(x
式中,x
步骤4:每个当前帧图像A对应一个当前帧参考图像B,将上一帧图像的当前帧参考图像B
步骤4中,当前帧参考图像B
其中,g
当前帧参考图像B
其中,g
根据公式(10)及公式(11)得到光斑整体移动向量r,r=(x
步骤5:由向量r对由步骤3得到的粗定位点(x
实施例
实验条件下获得的10KM的光斑图像500张,每张例如图2所示为500×600像素,将图像逐帧保存并进行归一化处理,逐帧读入图像,开始叠加图像,设置叠加帧数上限值n=10,当帧数没达到10帧时,每帧图像逐帧叠加后,对图像灰度值求平均生成当前帧参考图像B,当帧数达到10帧时,减去头帧,加上当前新帧图像灰度值后,求像素灰度平均值,逐次类推,生成每帧图像的当前帧参考图像B,如图3所示,具体处理流程见图1,此处当前帧图像A见图2表示,当前帧图像A的当前帧参考图像B见图3表示;
对当前帧参考图像B取阈值,阈值以下为默认为平均背景噪声,求阈值公式见式(1),阈值分割后图像如图4所示,对当前帧图像A减去平均噪声,见公式(4),然后求阈值,同时对光斑中心进行噪声补偿处理,处理原理见公式(8),然后对图像中值滤波,最后进行闭运算处理,预处理后得到图5所示图像;
使用非线性权重质心法对当前帧图像A进行粗定位,非线性权重质心定位算法见公式(9),此处p=2,得到当前帧图像的粗定位点(313.7,162.8);
每个当前帧图像A对应一个参考图像B,将上一帧图像参考图像B
步骤五:由步骤三得到的定位点(313.7,162.8),由向量r=(2.6,-3.9)对定位点(313.7,162.8)进行反向补偿,得到精定位点(313.7-2.6,162.8+3.9),即得到最终定位点(311.1,166.7)。
由图8所示,‘□’为形心,‘*’为质心定位点,‘+’为滑动加权质心定位点,‘×’为滑动加权质心定位点。
图9、10、11、12分别为实验条件下得到的500张10KM光斑图像使用滑动加权质心定位、非线性权重质心定位、质心定位、形心定位算法得到的定位点之间的距离。图13、14、15、16分别为使用滑动加权质心定位、非线性权重质心定位、质心定位、形心定位算法下光斑定位点取不同半径圆形掩膜后,掩膜内像素强度总值。
汇总数据见表1,表1的数据说明,虽然滑动加权质心定位算法像素强度不及非线性权重质心定位法,但是优于形质心法,同时,滑动加权质心定位算法的平均步长最小,说明该算法稳定性最高,而非线性权重质心定位算法的稳定性最差,因此,总体来看,对湍流环境下的畸变光斑,滑动加权质心定位算法稳定性最好,像素强度也比传统的形质心法高。
表1光斑处理过程效果分析
参考文献
[1]李晨阳,王同合,蒋理兴,吴建霖,谷友艺,王安成.高斯过程模型圆心定位算法[J].测绘科学技术学报,2018,35(06):557-562.
[2]李道萍,杨波.高精度光斑中心定位算法[J].光学仪器,2018,40(04):20-25.
[3]P.Zhou,X.Wang,Q.Huang and C.Ma,"Laser Spot Center Detection Basedon Improved Circled Fitting Algorithm,"2018 2nd IEEE Advanced InformationManagement,Communicates,Electronic and Automation Control Conference(IMCEC),Xi'an,2018,pp.316-319.
- 一种大气湍流下的光斑中心滑动加权质心定位方法
- 一种基于质心法的光斑图像中心的快速定位方法