基于多旋翼无人直升机的高精度航磁测量系统
文献发布时间:2023-06-19 12:04:09
技术领域
本发明涉及航空磁测技术领域,特别是涉及一种基于多旋翼无人直升机的高精度航磁测量系统。
背景技术
磁法测量广泛应用于金属矿产勘查和石油勘探中,目前磁法测量中常用的仪器主要有光泵磁力仪、质子旋进磁力仪和光泵磁力仪,其中Overhauser质子磁力仪和光泵磁力仪由于具有较高的分辨率和测量精度而广泛应用于航空磁测中,多用于有人机和固定翼无人机磁法测量中,适合进行大面积、长时间作业。
无人机航磁测量具有部署便捷、应用成本低、智能化、高效率、高精度等特点,目前已经成为了航空物探测量技术的一种重要手段。在无人机航磁测量系统中,多利用中小型固定翼无人机搭载磁测仪器进行数据采集,中小型固定翼无人机可弹射起飞以及通过伞降和撞网的方式进行降落,有效降低了其起降难度。但由于固定翼无人机巡航速度较快,采样间距大,数据分辨率较低,同时飞行高度较大,不适合在范围较小、地形复杂、起伏较大的地区飞行。而多旋翼无人直升机可实现定点起飞降落,对起降场地无要求,同时其可以贴地飞行,或者以固定的离地高度进行地形匹配飞行,并且其巡航速度可根据数据分辨率的需要在最大速度范围内进行合理调整,以获得理想的磁测数据,还可进行全自主或半自主飞行,在飞行过程可根据任务需要临时改变已设定的航点规划。
根据多旋翼无人直升机的特点,选择光泵磁力仪作为搭载仪器,光泵磁力仪重量小,功耗低,对电源要求少,其采样率相对较低的问题可通过适当降低无人机飞行速度解决。因此,利用多旋翼无人直升机搭载光泵磁力仪非常适合进行小范围、低空航磁测量,在诸如矿区详查、考古、寻找埋藏较浅的未爆炸物等实际问题中发挥重要作用。
当前航空磁法测量的热点是利用中小型固定翼无人机搭载磁测仪器进行数据采集,中小型固定翼无人机可弹射起飞以及通过伞降和撞网的方式进行降落,有效降低了起降难度。2013年,基于无人机航磁测量技术的发展前景,中国地质科学院地球物理地球化学勘查研究所突破了无人机系统集成、磁补偿等关键技术难题,成功将航磁仪搭载于CH-3无人机平台上,集成了我国首套国产中型无人机航磁测量系统。并在黑龙江多宝山、新疆克拉玛依、喀什以及滩涂等不同地形地区,开展了多种类型的地质调查应用示范工作,取得了良好的地质效果(李军峰等,2014;李飞等,2018;西永在等,2021)。
多旋翼无人机搭载磁传感器进行航磁观测随着无人机小型化及续航优化有了明显的技术进步,适用于中小面积大比例尺航磁详查工作,可作为大型有人机航磁测量和地面磁法测量的补充。成都理工大学利用旋翼无人机搭载三轴光泵传感器,设计出一款操作简单、设备轻便的航磁测量系统,在峡谷、沟壑等地的飞行测量试验证明该系统具有开展大比例尺航磁测量的能力(李志鹏等,2018)。浙江大年科技自主研发了多旋翼无人机航磁测量平台(MAG-DN20G4),实际应用效果达到了国内领先水平。该测量平台包括旋翼无人机飞行平台、三轴光泵测量仪,毫米波雷达高度计三部分组成(乔中坤等,2020)。北京桔灯公司完成了UFO系列航空磁测系统的研发与集成,主要应用在包括低空,海洋,陆地等环境下的无人驾驶平台上,包括UFO-F光泵系统,UFO-CS铯光泵系统,UFO-CS+铷光泵系统三大型号(参考自桔灯勘探官方网站)。加泰科公司将大疆六旋翼无人机M600Pro作为搭载平台,集成了铷光泵磁力仪、激光高度计,研发出GTK-RM600多旋翼无人机光泵航磁系统(参考自加泰科公司官方网站)。
目前,应用较为成熟的航空磁测系统主要包括固定翼及多旋翼无人机航磁测量系统,近五年来,为开展大比例尺航磁测量,多旋翼无人机更多地作为搭载平台应用于航磁系统集成。经过不断试验与改进,航磁测量有了明显的发展和进步,但仍存在一些不足之处,主要体现在以下几点:
(1)固定翼无人机易用性不高
相对多旋翼,固定翼无人机的起飞与降落有一定的场地和设施要求,在复杂地形情况下的易用性与操作便捷性不足。此外,无人机在起降阶段一般需要飞手人工操控,在地面条件不佳时存在风险。多旋翼无人直升机可实现定点起飞降落,对起降场地无要求,有效提高了测量系统的易用性,降低了野外作业风险。
(2)固定翼无人机不适合开展大比例尺航磁测量
由于固定翼无人机巡航速度较快,采样间距大,数据分辨率较低,同时飞行高度较大,不适合在范围较小、地形复杂、起伏较大的地区飞行。
(3)航磁测量的定位精度不足
目前多旋翼无人机航磁测量搭载的定位系统多为GPS与陀螺惯导的组合,垂直与水平定位精度在±1m左右,尚不满足大比例尺高精度磁测的精度要求。在高精度地面磁法测量作业中,一般采用基于载波相位观测值的实时动态定位技术,其定位精度可达厘米级。而目前无人机植保应用领域已逐渐开始使用RTK定位技术,有效提高了定位精度,降低了飞行误差。
(4)尚未实现3D飞行测量
无人机航磁系统在实际应用中尚未实现随地形起伏飞行,测量获取的磁测数据需进行地形校正,增加了计算过程,容易引入随机误差,从而导致测量结果精度降低及地质解释偏差。
(5)航磁补偿方案有待优化
常用的无人机航磁补偿方法多为软补偿,即应用Tolles-Lawson方程与适配算法对飞行观测数据进行补偿计算,降低磁干扰场的影响。但软补偿建立在无人机自身电磁场建模与算法的基础上,存在一定的人为干扰与随机误差,进而影响补偿精度。将软补偿结合硬补偿,即采用隔磁材料封闭无人机自身电磁感应强度较大的模块,能够取得更好的航磁补偿效果。
发明内容
本发明要解决的技术问题是提供一种基于多旋翼无人直升机的高精度航磁测量系统,以解决地面磁测受地形及其它客观条件限制造成效率低下,容易受无人机产生的电磁信号干扰,以及固定翼无人机磁测无法进行低速低空飞行等问题。
为解决上述技术问题,本发明提供了一种基于多旋翼无人直升机的高精度航磁测量系统,所述系统包括:多旋翼无人直升机、电磁干扰屏蔽板、光泵磁力仪、云台、定位系统、数据采集存储系统,其中,电磁干扰屏蔽板挂载在多旋翼无人直升机的机体的下方,其下方固接有云台,云台内部安装光泵磁力仪的磁传感器,定位系统固定在云台的底部外侧,定位系统包括:IMU惯性定位和RTK实时差分定位系统,数据采集存储系统安装在机体的一侧,并且同时与定位系统与光泵磁力仪连接。
在一些实施方式中,电磁干扰屏蔽板的制作材料可以是多层锡箔,或涂有导电层的塑料板。
在一些实施方式中,电磁干扰屏蔽板通过塑料螺栓螺母与多旋翼无人直升机的机体腹部连接,用于屏蔽多旋翼无人直升机产生的电磁干扰。
在一些实施方式中,云台上面安装有与电磁干扰屏蔽板连接的橡胶减震器,橡胶减震器通过螺栓和螺母与电磁干扰屏蔽板连接,用以减小机体震动的影响。
在一些实施方式中,云台的中心包括两个塑料喉箍,且光泵磁力仪通过喉箍安置在云台中。
在一些实施方式中,电源系统包括:电源管理单元PMU和两块6S的锂聚合物电池,输出电压为22.2V,两块电池串行连接,电池的容量可根据具体任务需要选择,10000mAh电量的电池单块重约1.2kg,16000mAh电量的电池单块重约1.7kg。
在一些实施方式中,数据采集存储系统能实时采集定位系统测量的姿态、位置和高度数据及接收磁传感器传输的磁法测量数据。
在一些实施方式中,在进行地面数据处理时,利用导航定位系统测量的姿态数据对光泵磁力仪测量的航磁数据进行补偿。
采用这样的设计后,本发明至少具有以下优点:
本发明设计了一种航磁测量系统,可进行半自主或全自主沿地形起伏飞行,稳定可靠,由两套定位系统测定机体姿态和位置的精确信息,并采用硬补偿与软补偿相结合的补偿方案。这套系统各部分安装便捷,简单易用,测量精度高,可探测到小尺度磁异常目标,非常适合进行小面积低空精细航磁测量。
附图说明
上述仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,以下结合附图与具体实施方式对本发明作进一步的详细说明。
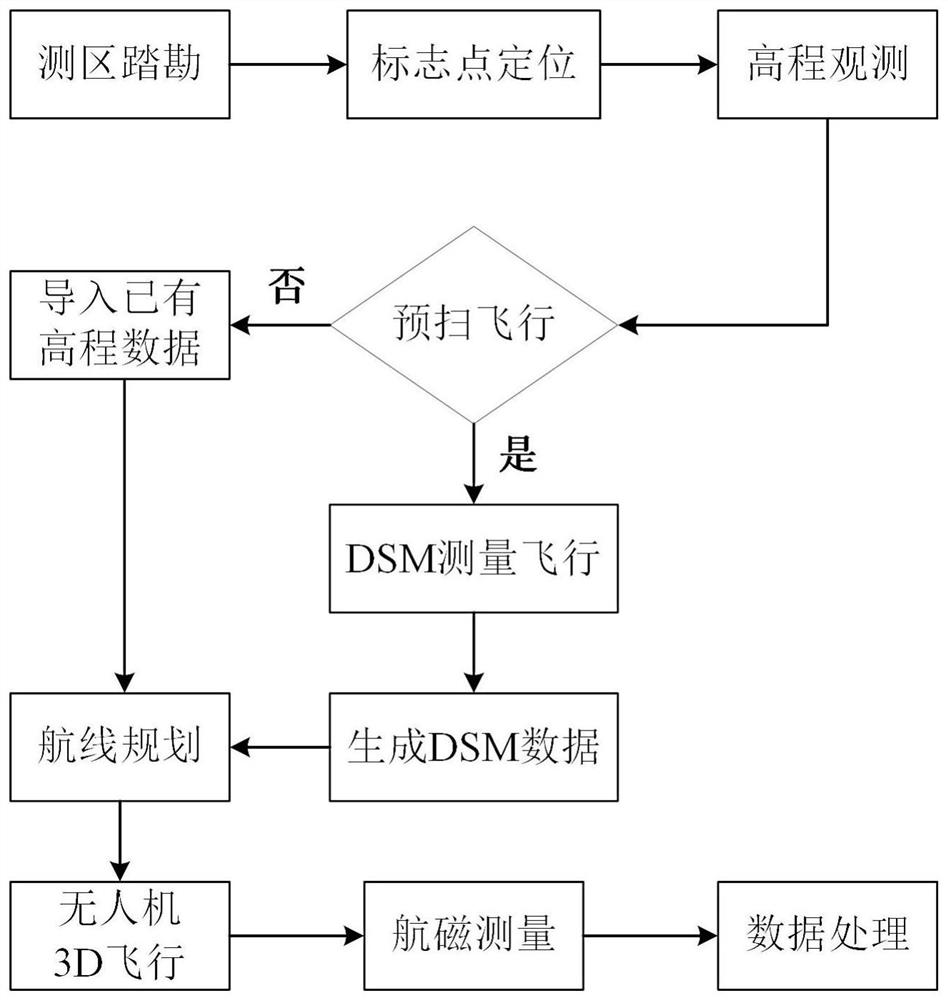
图1是无人机航磁系统数据采集流程图;
图2是多旋翼无人机航磁测量系统结构主视图;
图3是电磁干扰屏蔽板的俯视图。
附图标记说明:
1、定位系统 2、电磁干扰屏蔽板
3、数据采集存储系统 4、多旋翼无人直升机
5、电源 6、云台
7、喉箍 8、光泵磁力仪
9、橡胶减震器
具体实施方式
以下结合附图对本发明的优选实施例进行说明,应当理解,此处所描述的优选实施例仅用于说明和解释本发明,并不用于限定本发明。
在对以上技术进行针对性优化与改进的基础上,多旋翼无人机航磁测量系统将在大比例尺高精度磁测中发挥重要作用,完成地面测量无法开展的磁测任务,降低数据处理解释难度,有效提高观测效率与精度,为解决地质问题提供技术支撑。
针对所述缺点与不足,本发明所要解决的问题包括:
(1)实现无人机3D飞行,形成与地形一致的等高航磁测量:基于高度计与数字地表模型(Digital Surface Model,DSM),多旋翼无人机可以贴地飞行,或者以固定的离地高度进行地形匹配飞行,并且其巡航速度可根据数据分辨率的需要在最大速度范围内进行合理调整,以获得质量更高的磁测数据,还可进行全自主或半自主飞行,在飞行过程可根据任务需要临时改变已设定的航点规划。
(2)优化航磁补偿方案,提高观测精度:采用隔磁材料硬补偿与事后软补偿相结合的航磁补偿方案,将无人机机体中电磁感应强度较大的模块进行隔磁处理,并进行系统集成的感应磁化强度测试,优化隔磁布局,最大程度上降低二次感应磁场对测量传感器的干扰,提高观测精度。
(3)升级无人机导航定位系统,显著提高定位精度:在无人机系统中集成RTK与IMU结合的导航定位系统,能够明显提升垂直与水平定位精度,且将导航定位模块与磁传感器采用中心重合的上下布局,避免数据预处理中的位置校正。
本发明提供一种基于多旋翼无人直升机的高精度航磁测量系统,以解决地面磁测受地形及其它客观条件限制造成效率低下,容易受无人机产生的电磁信号干扰,以及固定翼无人机磁测无法进行低速低空飞行等问题。
为了实现上述目的,本发明实施例提供的技术方案如下:一种基于多旋翼无人直升机的高精度航磁测量系统,包括多旋翼无人直升机、光泵磁传感器、电磁干扰屏蔽板、云台、毫米波高度计、定位系统(包含IMU惯性导航单元和RTK实时差分定位系统)、数据采集存储系统和电源系统;
所述光泵磁力仪,其用于在多旋翼无人直升机飞行过程中进行磁法测量,并将测量数据传输到所述数据采集存储系统,目前最先进的钾光泵航空磁力仪的具体规格见表1。
表1磁力仪传感器技术参数
所述定位系统,其用于测量无人机的姿态数、位置和高度信息,并将飞行数据传输到无人机飞行控制器,飞行控制器和地面站实时通讯以实现对无人机的控制;
所述数据采集存储系统,其用于采集定位系统测量的数据、云台的姿态数据及接收光泵磁力仪传输的磁测数据;
所述电源系统,包括电池和电源管理单元(PMU),其用于给光泵磁力仪、云台、定位系统和数据采集存储系统等模块供电;
所述电池为锂聚合物电池,具有充放电效率高、重量轻、容量大、安全可靠等优点,将两块电池对称式安装在多旋翼无人直升机正上方GPS两侧,最多可实现四十分钟无间断飞行;
所述电源管理单元(PMU),连接锂电池输出和用电设备电源输入,主要功能是对锂电池电能进行变换、分配和检测,以为各部分电子设备提供合适、稳定的电源,保证其正常工作,可以实时监测电压、电流和温度的异常,并显示在地面站中。这种实时的信息反馈对操控无人机进行安全、稳定、有效的飞行具有重要作用;
所述云台上面安装有电磁干扰屏蔽板,且所述电磁干扰屏蔽板通过塑料螺栓螺母与多旋翼无人直升机的机体腹部连接,用于屏蔽多旋翼无人直升机产生的电磁干扰;
所述电磁干扰屏蔽板,主要用于减弱无人机电子电路产生的电磁干扰,所用材料可以是多层锡箔,或涂有导电层的塑料板等;
所述云台上面安装有与所述电磁干扰屏蔽板连接的橡胶减震器,所述橡胶减震器通过螺栓和螺母与电磁干扰屏蔽板连接,用以减小机体震动的影响。
航磁测量系统,所述多旋翼无人直升机在进行航磁测量时,既能通过地面站控制实现多旋翼无人直升机全自主飞行测量,也可以通过手动操作的方式进行手动飞行,在特殊情况下,可以二者结合进行半自主飞行测量;
所述数据采集存储系统能实时采集定位系统测量的姿态、位置和高度数据及接收磁传感器传输的磁法测量数据,所测数据在多旋翼无人直升机降落在地面时,可以通过数据接口导入到计算机中。
在进行地面数据处理时,利用导航定位系统测量的数据对磁测数据进行补偿计算。
需要注意的是,基站的设置及作业半径对RTK的测量精度和航磁测量作业速度有直接影响。基准站应尽量架设在地势较高的地方,而且要远离强电磁干扰源和大面积的信号反射物。另外,在有大面积的信号反射物的地方是无法定位的,如高层建筑附近,茂密的森林等;强电磁源也会干扰信号,如高压输电线附近,变电站等,在云层较厚的时候也有影响。
如图2与图3所示,本实施例给出了一种基于多旋翼无人直升机的高精度航磁测量系统,包括多旋翼无人直升机4、电磁干扰屏蔽板2、光泵磁力仪8、云台6、定位系统1、数据采集存储系统3和电源系统5。所述光泵磁力仪8包括与电源连接的供电电线和磁传感器,且所述供电电线沿云台6连接到电源,所述磁传感器安装在所述云台6内部。
所述数据采集存储系统,其用于采集定位系统1测量的光泵磁力仪8的角速度和角加速度数据及接收光泵磁力仪8传输的磁法测量数据,且所述数据采集存储系统3质量轻,所存储的数据包括磁传感器的实时位置和指向等信息,方便搭载和后期数据校正处理。
所述云台6的中心包括两个塑料喉箍7,且所述光泵磁力仪8通过喉箍7安置在云台6中。所述定位系统1固定在云台6的顶部外侧,能实时测量光泵磁力仪8的微小转动角度和角加速度。
所述云台6上面安装有电磁干扰屏蔽板2,且所述电磁干扰屏蔽板2上安装有与所述多旋翼无人直升机4机体腹部连接的橡胶减震器9,所述橡胶减震器9通过塑料螺栓和螺母与多旋翼无人直升机4的机体腹部连接,用于屏蔽多旋翼无人直升机产生的电磁信号。
所述云台6通过塑料螺栓和螺母与电磁干扰屏蔽板2连接。
所述多旋翼无人直升机4在进行航磁测量时,既能通过地面站实现多旋翼无人直升机全自主飞行测量,也可以通过手动操作的方式进行手动飞行测量,两种操控方式的切换开关在遥控器上,手动飞行测量虽然无法精确控制多旋翼无人直升机的姿态和离地高度,但有助于对测区进行全面覆盖测量。
所述数据采集存储系统3的所测数据在多旋翼无人直升机4降落在地面时,可以通过数据接口导入到计算机中。
所述电源系统包括两块6S的锂聚合物电池,输出电压为22.2V,两块电池串行连接,电池的容量可根据具体任务需要选择,10000mAh电量的电池单块重约1.2kg,16000mAh电量的电池单块重约1.7kg
基于上述航磁测量装置和数据处理方法,形成野外测量流程,如图1所示。下面给出本实施例运行时航磁测量的步骤:
步骤1,在多旋翼无人直升机上加装电磁干扰屏蔽板、光泵磁力仪、云台、定位系统、数据采集存储系统和电源系统。
步骤2,启动电源,使光泵磁力仪定位系统、数据采集存储系统工作。
步骤3,使用手动操作或自主导航飞行操纵多旋翼无人直升机。
步骤4,多旋翼无人直升机降落后,将数据采集存储系统采集的数据通过接口导入计算机中进行分析,数据分析时,将定位系统测量的数据对光泵磁力仪测量数据的数据进行补偿。
本发明的有益效果在于,本发明所述的基于多旋翼无人直升机的高精度航磁测量系统充分利用了多旋翼无人机的优点,具有可低速飞行、可低空飞行、可沿地形起伏飞行、受地形限制小、方便高效等特点。同时,多旋翼无人直升机能实现定点起飞降落,定点悬停,同时能低速飞行。
在实际的无挂载飞行测试中,多旋翼无人直升机的控制半径最大可达5km,续航时间约30~40min,巡航速度最大可达30km/h,若以5m/s的速度飞行,仪器采样率设定为10Hz,则相应的采用间距为0.5m,可以获得分辨率较高的数据,而且还可以继续降低飞行速度以及提高采样率。若在20000m
此外,在寻找地表以下的浅部磁异常体时,多旋翼无人直升机可以很低的高度贴地飞行,例如在地形较为平坦的区域,可在地面站设定飞行高度为1~2m,这样更有利于发现浅部微小磁异常。另一个优点在于,在无树木、电线杆、小型建筑物等物体的小范围区域内,利用本发明所述的测量系统可以进行夜间航磁测量。测量前在机身的合适位置,例如螺旋桨电机下方,安装LED显示灯,用以确定多旋翼无人机所在的位置,并在地面站设定飞行的安全高度,即可进行任务飞行。
夜间磁法测量可以有效减小日变干扰,使测量数据更精确。根据野外实测数据,一般情况下,一天中零时至正午时段为磁日变“安静周期”,期间日变值变化很小,幅度也只有10~20nT。基于多旋翼无人直升机的航磁测量系统的这些特点,都有助于提高测量效率及磁测数据的可靠性和易用性。
综上所述,本发明所涉及的技术方案保证了系统平台对测量仪器良好的适配性,应用先进的磁测仪器搭载平台、航磁补偿技术、高精度定位与高度计模块,具备高效率、低成本、不易受地形影响的优势,实现勘探工作中的高精度航磁测量,提高对油气、矿产及地热资源靶区的识别能力。
以上所述,仅是本发明的较佳实施例而已,并非对本发明作任何形式上的限制,本领域技术人员利用上述揭示的技术内容做出些许简单修改、等同变化或修饰,均落在本发明的保护范围内。
- 基于多旋翼无人直升机的高精度航磁测量系统
- 一种多旋翼无人机氦光泵航磁测量系统