一种三角GPS测量杆及测量方法
文献发布时间:2023-06-19 12:04:09
技术领域
本发明属于工程GPS测量技术领域,具体涉及一种用于工程测量的三角GPS测量杆及测量方法。
背景技术
工程测量中经常采用GPS进行点测量或者施工放样。传统的工程GPS测量装置包括一对中杆,对中杆上端固定一GPS定位仪,将对中杆下端支撑在待测点上,并保持对中杆与水平面垂直,通过GPS定位仪的接受数据和对中杆长度,可计算出待测点的空间坐标。对中杆上设有水准泡,测量时通过观测和调整水准泡居中控制对中杆的垂直度,存在的问题是通过目测判断水准泡是否居中会产生人为误差,导致测量精度下降,且测量时需反复调整,施工效率较低。
发明内容
本发明针对上述问题,提供一种三角GPS移动测量杆及测量方法,测量杆上不设水准泡,测量时测量杆不用对中,使GPS测量杆在任意角都可进行工程测量与施工放样,简化GPS工程测量杆的操作,提高GPS测量效率。
本发明提供的一种三角GPS移动测量杆,其特征在于:包括一支撑杆,所述支撑杆的上端固定连接一圆盘,支撑杆与圆盘的底面垂直,支撑杆的轴心过圆盘的圆心;所述圆盘上设3个GPS测量点,每个GPS测量点用于连接一GPS测量仪,3个GPS测量点呈等边三角形设置,且等边三角形的中心与圆盘的圆心重合。
采用上述三角GPS测量杆进行工程测量的方法,其特征在于包括以下步骤:
(1)将支撑杆的下端支撑在待测点上,保持支撑杆固定;
(2)通过GPS测量仪测得3个测量点的坐标;
(3)根据3个测量点的数据及支撑杆的长度,通过几何运算计算出待测点的位置数据。
本发明在测量杆上取消了水准泡,测量时不用刻意调整测量杆的垂直度,采用空间三角算法,通过3个点的GPS测量值直接推导待测点的坐标值,可避免人为立杆误差,增加测量精度,并提高测量效率。
附图说明
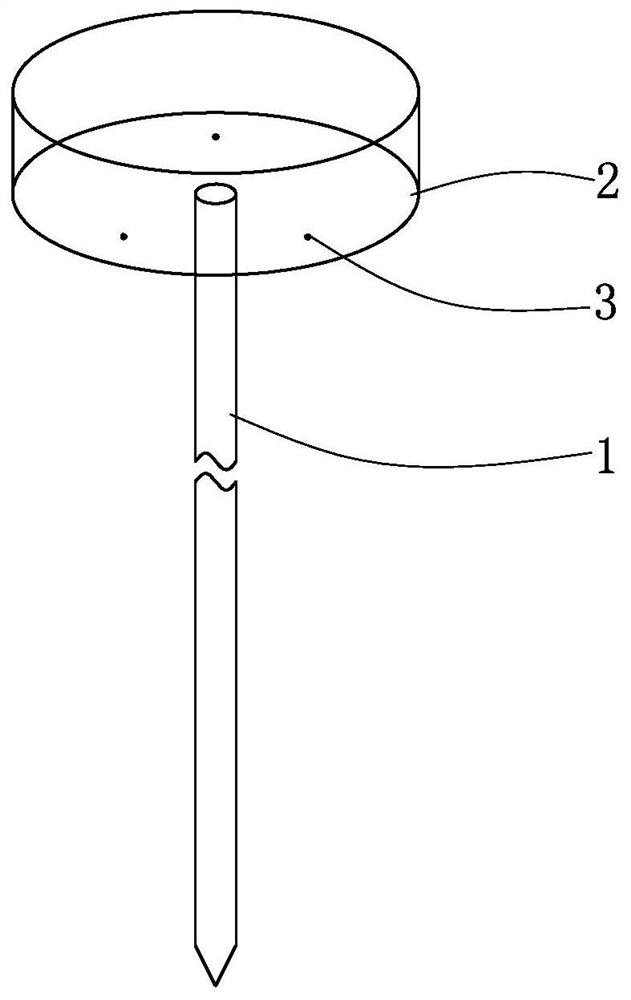
图1是本发明的GPS测量杆结构示意图;
图2是本发明的平面结构示意图;
图3是三角GPS测量杆的结构简化图;
图4是三角GPS测量杆测量时的状态简化图;
图5、图6、图7是待测点坐标的推导过程辅助图。
具体实施方式
如图1、图2所示,本发明提供的一种三角GPS测量杆,包括一支撑杆1,所述支撑杆1的上端固定连接一圆盘2,支撑杆1与圆盘2的底面垂直,支撑杆1的轴心过圆盘2的圆心;所述圆盘顶面设3个GPS测量点3,每个GPS测量点设一螺杆或螺孔,用于连接一GPS测量仪,3个GPS测量点所在的平面与支撑杆的轴心垂直,3个GPS测量点3呈等边三角形设置,且等边三角形的中心与圆盘的圆心重合。
采用上述三角GPS测量杆进行工程测量,包括以下步骤:
(1)将支撑杆的下端支撑在待测点上,保持支撑杆固定;
(2)通过GPS测量仪测得3个测量点的空间坐标;
(3)根据3个测量点的数据及支撑杆的长度,通过几何运算计算出待测点的空间坐标数据。具体推导及运算过程如下:
将三角GPS测量杆的结构简化为如图3所示,点A、B、C为3个测量点,DE为支撑杆,点D为圆盘的圆心,点E为支撑杆下端。面ABC垂直直线OE且相交与点D。
测量杆实际测量时的状态结构简化为图4所示,在空间坐标系中,支撑杆下端E支撑在待测点上,即点E也代表待测点。ABC三点形成的三角形位于直径为R的圆D圆弧上,且三角形ABC为正三角形。
通过GPS测量仪测得A、B、C的坐标分别为(x
∵点D为ΔABC外切圆圆心,且ΔABC为全等三角形
∴由空间几何关系得:
当支撑杆与水平面垂直时,z′
点E的坐标为
当不考虑支撑杆与水平面垂直时,可推导待测点E的坐标值(x
如图5所示,在空间坐标系中,对ABC三点Z轴线坐标值排序。设z′
过D点做平行于
∵I
∴
又∵ab直线在
∴I
又∵已知直线
∴ED⊥直线ab
又I
∴直线
又∵ID位于
∴直线ab⊥直线DI
又∵
∴∠I
又∵
∴∠I
又∵做
∴设a(x′,y′,z
又∵当z′
图6(1)中,A
由几何关系得:
图6(2)中,A
由几何关系得:
当z′
图7(1)中C
由几何关系得:
图7(2)中C
由几何关系得:
同理得点b坐标为
由空间坐标系两点距离公式可得:
又
又
又
又
又
∴带入公式可得z
按上述步骤同理分别做
- 一种三角GPS测量杆及测量方法
- 一种GPS控制网三角形闭合环的环闭合差测量方法