一种基于曲柄摇杆机构的仿生机械牛及控制方法
文献发布时间:2023-06-19 12:04:09
技术领域:
本发明涉及一种机器人的制造技术领域,尤其涉及一种可广泛民用的仿生机械牛。
背景技术:
仿生机器人是一个迅速发展的研究领域,其主要的研究方向是原型涉及、开发和应用。
近几年来,仿生机器人在山地、台阶、泥淖等地形复杂的环境进行地形勘察、执行危险任务等诸多领域得到了广泛研究与运用。
目前,仿生机器人更多是针对复杂地表环境下行走作业进行设计的自主机器人,具有典型的移动和智能特点。例如美国波士顿动力公司研制的BIGDOG四足仿生机器人实现了雪地、冰面等复杂路面稳定行走,并能够在受到外界冲撞后自主保持稳定,俄罗斯研制的四足仿生机器人配备中口径武器,可以参加复杂环境作战,德国、意大利、韩国等国家也开展了相关技术研究,我国目前共有近十家研究机构开展了四足仿生无人平台研究。但是,此类机器人结构复杂,造价昂贵,更多地是用于军用需求,无法广泛运用于日常生活中。
为了满足民用需求,更好地将仿生机器人运用于我们的日常生活中,开发一种结构简单、造价低的仿生机器人具有实际运用价值。
发明内容:
本发明针对现有技术的不足和缺陷,提供一种用于可广泛民用的仿生机械牛,这是一个目前研究相对较少的领域,该仿生机械牛具有工作原理简单、结构紧凑、控制容易等优点,较好的模拟了牛的步态运动,设计有一个装载物品的结构,具有载物功能,可为后续优化仿生机器的性能奠定基础。同时,本发明还可以用作娱乐用途,用作展览与一些剧场的道具使用等。
为实现上述目的,本发明提供了如下技术方案:一种基于曲柄摇杆机构的仿生机械牛,包括仿生牛头、牛尾、牛身外壳及电器模块与机械模块,仿生牛头和牛尾安装在牛身外壳的头部和尾部,其特征在于:电器模块安装在所述牛身外壳的内部,所述机械模块包括安装在所述牛身外壳外侧的曲柄摇杆机构,由所述电器模块控制曲柄摇杆机构进行仿生机械牛腿的行走。
在一个实施例中,所述曲柄摇杆机构由四组组成,分别仿生牛的四条腿;每组曲柄摇杆机构包括曲柄、第一连杆、第二连杆、第三连杆、第四连杆、一组上三角板和一组下三角板;其中,曲柄的第一端由直流电机的输出端驱动,曲柄的第二端与第一连杆的第一端及第二连杆的第一端之间转动连接,第一连杆的第二端与一组上三角板的第一角端之间转动连接,第二连杆的第二端与一组下三角板的第一角端及第三连杆的第二端之间转动连接,第三连杆的第一端与一组上三角板的第二角端之间转动连接,第四连杆的第一端与一组上三角板的第三角端之间转动连接,第四连杆的第二端与一组下三角板的第二角端之间转动连接,一组下三角板的第三角端设在底部且与仿生牛蹄机构之间转动连接。
在一个实施例中,所述直流电机的输出通过齿轮传动机构后传递给所述曲柄的第一端。
在一个实施例中,所述齿轮传动机构包括联轴器、主动轴、第一凸台齿轮、第二凸台齿轮、第一从动轴和第二从动轴;其中,所述直流电机的输出端通过联轴器与主动轴轴向连接,在主动轴上的外壁安装同轴度的第一凸台齿轮,第二凸台齿轮与第一凸台齿轮啮合,在第二凸台齿轮的中心向外轴向连接第一从动轴和第二从动轴,第一从动轴和第二从动轴分别驱动相对应的所述曲柄。
在一个实施例中,在所述第一从动轴和所述第二从动轴上安装同步轮,同步轮通过同步带与同侧的所述齿轮传动机构上的同步轮连接。
在一个实施例中,所述第一凸台齿轮通过顶丝与所述主动轴进行限位连接,所述第二凸台齿轮通过顶丝与所述第一从动轴及所述第二从动轴进行限位连接。
在一个实施例中,所述转动连接处设置推力球轴承。
在一个实施例中,在所述推力球轴承的一侧或两侧通过安装垫片和螺母进行固定。
在一个实施例中,所述电器模块包括控制板和控制板电源,所述牛身外壳由上、下、左、右、前、后矩形面板围成的封闭矩形腔体组成,控制板和控制板电源安装在封闭矩形腔体内,支撑支架分别支撑所述第一从动轴和所述第二从动轴,电机底座支撑所述直流电机。
在一个实施例中,所述仿生牛蹄机构包括底板、基座和连接轴,底板上安装基座,在基座的两侧向外横向布置连接轴,连接轴与所述一组下三角板的第三角端之间转动连接。
一种基于曲柄摇杆机构的仿生机械牛的控制方法,
模型计算方式:
曲柄摇杆机构,即仿生机械牛腿,用标准的D-H参数法,对其进行位姿描述;然后对其进行正运动分析,利用Matlab软件进行逆运动求解,得出每个关节间的角度关系;再通过Matlab软件中的GUI界面进行仿生牛腿的步态生成,检查是否符合设计要求,然后对其进行优化设计,以达到所需的步态规划要求;
仿生机器人建模:
搭建Solid works三维模型,验证结构设计的合理性,
利用Motion功能进行运动仿真分析;
实物控制方式:S1.使用者可以通过蓝牙app操控,控制仿生机械牛的前进、后退以及转弯。
S2.使用者通过蓝牙app,通过蓝牙功能,向仿生机械牛发出前进或后退的指令,STM32单片机接收信号,向电机驱动芯片发出电机正转或反转信号,使两个直流电机进行同步正向转动或反向转动输出动力,通过耦合齿轮传输给传动轴,传动轴与同步轮同步转动,同步带的作用保证了前后同步轮的同步转动,具有协调性,传动轴通过法兰盘与曲柄连接,最终动力输出给曲柄,曲柄转动带动仿生牛腿的运动,从而实现仿生机械牛的仿生运动。
S3.所述电器模块中安装有传感器进行信号反馈,通过陀螺仪感知仿生机械牛的运动姿态,编码器感知直流有刷电机的转速,然后对仿生机械牛的运动对STM32单片机进行信号反馈,对电机的转速与方向进行调整,使得仿生机械牛能更好地进行仿生运动。
S4.使用者通过蓝牙app,通过蓝牙功能,向仿生机械牛发出前进或后退的指令,STM32单片机接收信号,向电机驱动芯片发送电机不同转速的信号,使两个直流有刷电机实现差速转动,然后由机构传动实现仿生机械牛的转弯运动。
本发明的主要有益效果在于:
本发明涉及到研究相对较少的民用仿生机械人领域。该仿生机械牛主要采取转盘式传动机构进行动力传输,具有工作原理简单、结构紧凑、控制容易、制作方便等优点,较好的模拟了牛的步态运动,设计了有一个装载物品的外壳结构,可以具有载物功能。
同时,该作品还可以用作娱乐用途,例如作为儿童新型启蒙与益智玩具,用作展览与某些场景的道具等。
本发明中的仿生牛蹄机构主要优点:在陆地上难免坑洼不平,该结构可以增大它与地面的接触面积,还能提高它的稳定性,保证装置既有一定的动力,又对装载的物品提供了保障,减少了损伤,在现实生活中会给人更好的体验感。
附图说明:
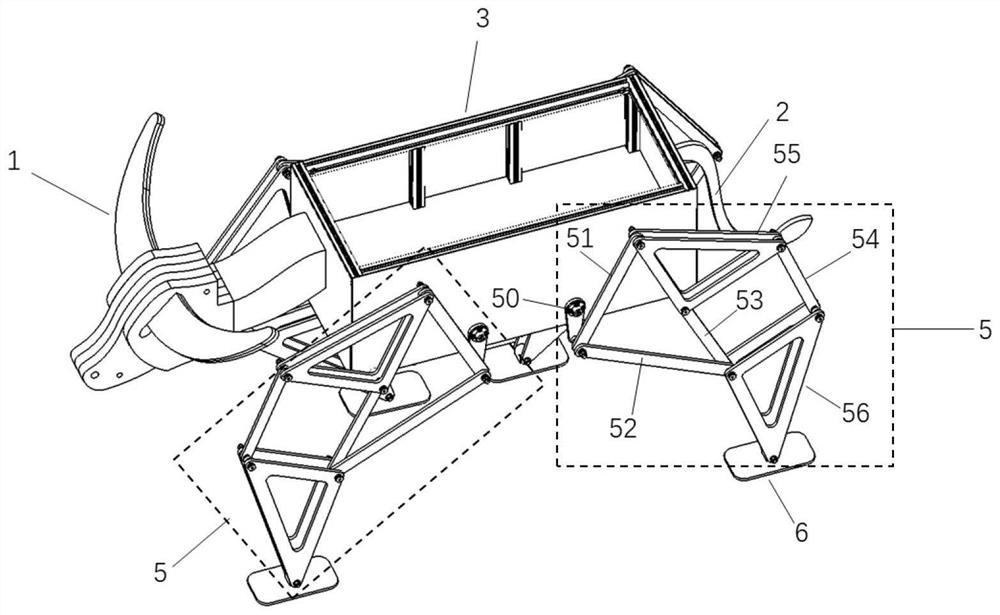
图1揭示了本发明一实施例中的总体结构示意图;
图2揭示了本发明一实施例中,仿生牛身外壳与仿生牛头及仿生牛尾的布置图;
图3揭示了本发明一实施例中,电器模块的总体布置示意图;
图4揭示了本发明一实施例中,齿轮传动机构的连接爆炸图;
图5揭示了本发明一实施例中,齿轮传动机构进行动力输出的连接爆炸图;
图6揭示了本发明一实施例中,仿生牛腿的结构连接爆炸图
图7揭示了本发明一实施例中,仿生牛腿连杆结构连接的示意图。
图8揭示了本发明一实施例中,一种基于曲柄摇杆机构的仿生机械牛的控制方法的设计原理图
在图示中:
1-牛头,
2-牛尾,
3-牛身外壳,
5-曲柄摇杆机构,
50-曲柄50,
51-第一连杆,
52-第二连杆,
53-第三连杆,
54-第四连杆,
55-上三角板,
56-一组下三角板,
50-曲柄,
6-仿生牛蹄机构
8-直流电机
90-联轴器,
91-主动轴,
92-第一凸台齿轮,93-第二凸台齿轮,94-第一从动轴,95-第二从动轴95,96-同步轮,97-顶丝,98-推力球轴承,99-垫片,100-螺母,71-控制板,72-控制板电源,31-上矩形面板,32-下矩形面板,33-左矩形面板,34-右矩形面板,35-前矩形面板,36-后矩形面板,103-支撑支架,104-电机底座,61-底板,62-基座,63-连接轴,
101-螺栓,
102-法兰盘,
103-支撑支架,
104-电机底座,
105-轴承,
106-平头螺丝。
具体实施方式:
以下由特定的具体实施例说明本发明的实施方式,本领域技术人员可由本说明书所揭示的内容轻易地了解本发明的其他优点及功效。虽然本发明的描述将结合较佳实施例一起介绍,但这并不代表此发明的特征仅限于该实施方式。恰恰相反,结合实施方式作发明介绍的目的是为了覆盖基于本发明的权利要求而有可能延伸出的其它选择或改造。为了提供对本发明的深度了解,以下描述中将包含许多具体的细节。本发明也可以不使用这些细节实施。此外,为了避免混乱或模糊本发明的重点,有些具体细节将在描述中被省略。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
在本实施例的描述中,需要说明的是,术语“上”、“下”、“内”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,或者是该发明产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
术语“第一”、“第二”等仅用于区分描述,而不能理解为指示或暗示相对重要性。
在本实施例的描述中,还需要说明的是,除非另有明确的规定和限定,术语“设置”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实施例中的具体含义。
参考图1并结合图2-图7,在图1和图2中的实施例中,一种基于曲柄摇杆机构的仿生机械牛,包括仿生牛头1、牛尾2、牛身外壳3及电器模块与机械模块,仿生牛头1和牛尾2安装在牛身外壳3的头部和尾部,其特征在于:电器模块4安装在所述牛身外壳3的内部,所述机械模块包括安装在所述牛身外壳外侧的曲柄摇杆机构5,由所述电器模块4控制曲柄摇杆机构5进行仿生机械牛腿的行走。
作为一个优选,所述曲柄摇杆机构5由四组组成,分别仿生牛的四条腿;每组曲柄摇杆机构5包括曲柄50、第一连杆51、第二连杆52、第三连杆53、第四连杆54、一组上三角板55和一组下三角板56;其中,曲柄50的第一端由直流电机的输出端驱动,曲柄50的第二端与第一连杆51的第一端及第二连杆52的第一端之间转动连接,第一连杆51的第二端与一组上三角板55的第一角端之间转动连接,第二连杆52的第二端与一组下三角板56的第一角端及第三连杆53的第二端之间转动连接,第三连杆53的第一端与一组上三角板55的第二角端之间转动连接,第四连杆54的第一端与一组上三角板55的第三角端之间转动连接,第四连杆54的第二端与一组下三角板56的第二角端之间转动连接,一组下三角板56的第三角端设在底部且与仿生牛蹄机构6之间转动连接。
作为一个优选,所述直流电机8的输出通过齿轮传动机构后传递给所述曲柄50的第一端。
在图4和图5的实施例中,所述齿轮传动机构包括联轴器90、主动轴91、第一凸台齿轮92、第二凸台齿轮93、第一从动轴94和第二从动轴95;其中,所述直流电机8的输出端通过联轴器90与主动轴91轴向连接,在主动轴91上的外壁安装同轴度的第一凸台齿轮92,第二凸台齿轮93与第一凸台齿轮92啮合,在第二凸台齿轮93的中心向外轴向连接第一从动轴94和第二从动轴95,第一从动轴94和第二从动轴95分别驱动相对应的所述曲柄50。
作为一个优选,在第一从动轴94和第二从动轴95上安装同步轮96,同步轮96通过同步带与同侧的所述齿轮传动机构上的同步轮96连接。
作为一个优选,所述第一凸台齿轮92通过顶丝97与所述主动轴91进行限位连接,所述第二凸台齿轮93通过顶丝97与所述第一从动轴94及所述第二从动轴95进行限位连接。
作为一个优选,所述转动连接处设置推力球轴承98。
作为一个优选,在所述推力球轴承98的一侧或两侧通过安装垫片99和螺母100进行固定。
在图2和图3的实施例中,所述电器模块包括控制板71和控制板电源72,所述牛身外壳由上矩形面板31、下矩形面板32、左矩形面板33、右矩形面板34、前矩形面板35、后矩形面板36围成的封闭矩形腔体组成,控制板71和控制板电源72安装在封闭矩形腔体内,支撑支架103分别支撑所述第一从动轴和所述第二从动轴,电机底座104支撑所述直流电机8。
在图6的实施例中,所述仿生牛蹄机构6包括底板61、基座62和连接轴63,底板61上安装基座62,在基座62的两侧向外横向布置连接轴63,连接轴63与所述一组下三角板56的第三角端之间转动连接。
图7的实施例中,R1-R7显示的是七个转动副。
可以理解的是,其中牛身外壳起到支撑和承载的作用,仿生牛头与牛尾分别通过螺钉直接与牛身外壳进行固连,而上、下、前、后、左、右矩形面板通过榫接进行拼装,螺栓进行固定。
同样可以理解的是,一组上三角板和一组下三角板数量可以是一块,也可以根据支撑强度的要求是叠加在一起的多块。
电器模块起到电能供给和控制作用。
机械模块用于实现直流电机的力矩输出,具体通过第一凸台齿轮与第二凸台齿轮的传动来实现。直流电机通过联轴器与主动轴连接,主动轴通过轴承与传动轴支撑支架进行连接并使用顶丝进行限位。第一凸台齿轮和第二凸台齿轮通过轴承与传动轴支撑支架进行连接,并用平头螺丝进行限位。
直流电机通过电机底座与地板进行连接,并用固定螺丝与地板进行固定。支撑传动轴的支撑支架通过螺栓与地板进行固连。
第一凸台齿轮与第二凸台齿轮耦合,同步轮通过顶丝与传动轴进行固连,并通过同步带与同侧的同步轮进行连接,从而实现同侧的动力传输。
传动轴可以通过法兰盘102与曲柄50进行连接,并通过螺栓30进行固定,顶丝31进行限位,法兰盘上开有能让顶丝插入的孔,顶丝通过法兰盘上的孔插入,防止法兰盘滑移。曲柄通过转动副R1与第一连杆、第二连杆进行连接。具体表现为曲柄可以通过螺栓与第一、第二连杆进行连接,通过在曲柄与第一连杆,第一连杆与第二连杆之间可以装配推力球轴承,最后用垫片和螺母进行固定。
其中垫片是为了增加曲柄与上连杆间的距离,以保证结构的传动。
在每只脚的足端,设计了一种新型牛蹄结构,原结构的足端为圆弧形,与地的接触面积很小,摩擦力也就不足,易出现打滑情况,设计的新型牛蹄结构主要有以下优点:在陆地上难免坑洼不平,该结构可以增大它与地面的接触面积,还能提高它的稳定性,保证装置既有一定的动力,又对装载的物品提供了保障,减少了损伤。在现实生活中会给人更好的体验感。
一种基于曲柄摇杆机构的仿生机械牛的控制方法,工作原理如下:
S1.使用者可以通过蓝牙app操控,控制仿生机械牛的前进、后退以及转弯。
S2.使用者通过蓝牙app,通过蓝牙功能,向仿生机械牛发出前进或后退的指令,STM32单片机接收信号,向电机驱动芯片发出电机正转或反转信号,使两个直流电机进行同步正向转动(反向转动)输出动力,通过耦合齿轮传输给传动轴,传动轴与同步轮同步转动,同步带的作用保证了前后同步轮的同步转动,具有协调性,传动轴通过法兰盘与曲柄连接,最终动力输出给曲柄,曲柄转动带动仿生牛腿的运动,从而实现仿生机械牛的仿生运动。
S3.所述电器模块中安装有传感器进行信号反馈,具体特征为通过陀螺仪感知仿生机械牛的运动姿态,编码器感知直流有刷电机的转速,然后对仿生机械牛的运动对STM32单片机进行信号反馈,对电机的转速与方向进行调整,使得仿生机械牛能更好地进行仿生运动。
S4.使用者通过蓝牙app,通过蓝牙功能,向仿生机械牛发出前进或后退的指令,STM32单片机接收信号,向电机驱动芯片发送电机不同转速的信号,使两个直流有刷电机实现差速转动,然后由所述2的机构传动实现仿生机械牛的转弯运动。
对于本领域技术人员而言,民用市场潜力巨大,想进军本领域的人员就可以根据本发明的构思作出诸多修改和变化。显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
- 一种基于曲柄摇杆机构的仿生机械牛及控制方法
- 基于物理斜曲柄摇杆机构的仿生鱼尾