一种拖拉机离合操纵助力机构及助力方法
文献发布时间:2023-06-19 12:08:44
技术领域
本发明涉及车辆离合器技术领域,特别是一种拖拉机离合操纵助力机构。
背景技术
拖拉机在行驶过程中,由于道路及交通情况的不断变化,需要频繁换档去适应,因而需要频繁踩踏离合踏板,市场上离合器踏板沉重是用户经常反馈的问题,一方面是没有离合操纵助力机构,另一方面是有助力结构但难以匹配离合操纵。
图1为现有拖拉机离合操纵助力机构,它主要是以采用液压泵来降低离合踏板力,采用此机构布置困难、装配复杂,同时增加了拖拉机的制造成本,由于频繁踩踏离合踏板,液压泵频繁连续工作,液压泵容易发生故障液压助力方式的缺点,并且液压泵式助力离合操纵机构需要安装的空间较大,占用较大的车内空间,一旦发生故障,其修整难度大。
因此,为满足用户对拖拉机舒适性的需求,提高作业效率,开发一款成本低、结构简单可靠、可有效助力的离合操纵机构是非常有必要。
发明内容
本发明要解决的技术问题是针对上述现有技术的不足,而提供一种拖拉机离合操纵助力机构,该拖拉机离合操纵助力机构利用弹簧与连杆的配合使用,有效降低离合踏板的操纵力,提高作业的舒适性。
为解决上述技术问题,本发明采用的技术方案是:
一种拖拉机离合操纵助力机构,包括离合踏板合件、转动臂、支撑臂、固定板、助力弹簧;所述固定板直接或间接安装在拖拉机车身上;所述离合踏板合件包括离合踏板、踏板摇臂、限位拉耳、踏板毂、离合拉耳;所述踏板毂的一端转动安装在固定板上,所述踏板毂的另一端沿周向逆时针依次布设有所述踏板摇臂、所述限位拉耳和所述离合拉耳;所述踏板摇臂的另一端安装所述离合踏板;所述离合拉耳的另一端与离合器的操纵拉杆相铰接;所述限位拉耳的另一端与转动臂的一端相铰接,转动臂的另一端铰接在支撑臂的中部;所述支撑臂的一端铰接安装在固定板上,所述支撑臂用于安装所述助力弹簧,所述助力弹簧的底端安装在在拖拉机车身上;所述支撑臂的一端铰接在固定板的上部,支撑臂的另一端与助力弹簧的一端固定连接;通过控制离合踏板的踩踏角度,能将助力弹簧的回复力作为离合器分离传动系统的驱动力。
作为本发明的进一步的优选方案,还包括固定安装在拖拉机车身的离合踏板轴支架;固定板固定安装于离合踏板轴支架,踏板毂与固定板的连接部位于离合踏板轴支架上,且踏板毂与固定板的连接部与离合踏板轴支架之间布设平垫。
作为本发明的进一步的优选方案,所述踏板毂的内部布设衬套,且衬套中设置润滑孔。
根据上述的一种拖拉机离合操纵助力机构,提出一种拖拉机离合踏板助力方法,具体步骤如下:
步骤1、初始限位:初始时,使限位拉耳处于离合踏板轴支架的开档限位位置;假设踏板毂在固定板上的转动支点为A,转动臂与限位拉耳的铰支点为B,转动臂与支撑臂的铰支点为C,则此时:铰支点B位于点AC连线的左侧,且助力弹簧处于拉伸状态,具有设定的预拉应力;离合器与传动系统的操纵机构之间具有设定空程;
步骤2、助力弹簧拉伸:当拖拉机需要挂挡时,踩下离合踏板,离合踏板合件绕转动支点A顺指针旋转,直至离合器与传动系统的操纵机构相接触;在离合踏板合件旋转的过程中,离合踏板的踩踏力,只需克服助力弹簧的拉应力;当离合器与传动系统的操纵机构相接触时,铰支点B、转动支点A和铰支点C位于同一竖直直线,助力弹簧处于最大拉伸状态,具有最大拉应力;
步骤3、助力弹簧收缩并助力:继续踩踏离合踏板,逐步增大离合踏板的踩踏角度,离合器将带动传动系统的操纵机构动作,传动系统逐步分离;当离合踏板达到最大踩踏角度时,传动系统彻底分离;在传动系统分离的过程中,铰支点B位于点AC连线的右侧,且助力弹簧逐步回复收缩,助力弹簧的回复力将作为离合器分离传动系统的驱动力;当离合踏板达到最大踩踏角度时,助力弹簧处于最小拉伸状态;
步骤4、助力弹簧复位:松开离合踏板,在离合器碟簧恢复力作用下,由于此时助力弹簧拉应力小于离合器碟簧恢复力和机械件摩擦力,离合踏板恢复至步骤1的初始状态。
作为本发明的进一步的优选方案,所述踏板摇臂与水平线的夹角为α,30°≤α≤80°。
作为本发明的进一步的优选方案,在初始限位中,30°≤α≤40°。
作为本发明的进一步的优选方案,在初始限位中,助力弹簧的预拉应力大于等于100N。
本发明具有如下有益效果:
1、本发明公开的一种拖拉机离合操纵助力机构,其生产成本低廉,结构简单可靠,易装配,能够实现该助力布置方式与离合器分离特性的高匹配度,从而有效降低离合踏板的操纵力,提高作业的舒适性;
2、本发明公开的一种拖拉机离合操纵助力机构,利用支撑臂与转动臂、转动臂与离合踏板合件的铰支点可根据离合踏板踩下的角度进行平动和转动,仅通过二者旋转铰支点及助力弹簧,就可轻松、有效地实现助力拖拉机离合器与传动系统彻底分离的目的,本操纵助力机构结构简单,操作方便,驾驶员可快速、方便的踩踏离合器。
附图说明
图1是现有技术中的液压泵式离合踏板助力操纵机构;
图2-1是现有技术中的无助力式离合踏板操纵机构;
图2-2是图2-1的主视图;
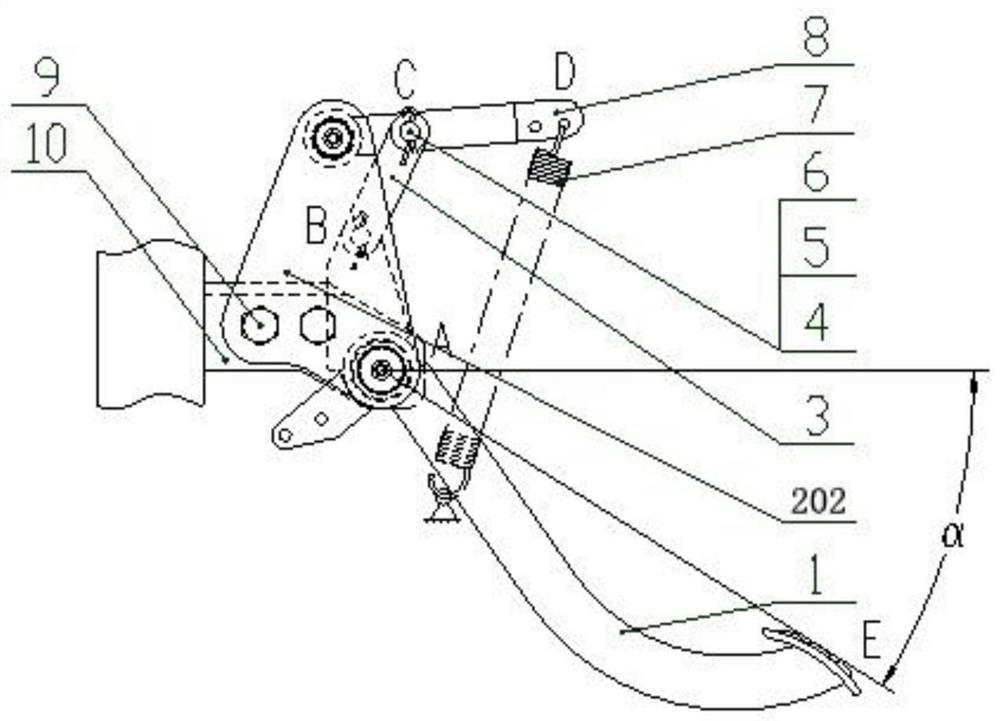
图3-1是本发明一种拖拉机离合操纵助力机构的左视图;
图3-2是初始状态时,本发明一种拖拉机离合操纵助力机构的结构示意图;
图3-21是图3-2的对应受力示意图;
图3-3是助力弹簧处于最大拉伸状态时,本发明一种拖拉机离合操纵助力机构的结构示意图;
图3-4是离合器彻底分离时,本发明一种拖拉机离合操纵助力机构的结构示意图;
图3-41是图3-4设为对应受力示意图;
图4-1是本发明中的离合踏板合件主视图;
图4-2是本发明中的离合踏板合件右视图;
图5是本发明中的支撑柱合件的结构示意图;
图6-1是本发明中的支撑臂的正视图;
图6-2是本发明中的支撑臂的俯视图;
图7是本发明中的离合踏板角度与助力弹簧助力的关系变化曲线图。
其中有:1.离合踏板合件;101.离合踏板;102.踏板摇臂;103.限位拉耳;104.离合拉耳;105.衬套;106.踏板毂;2.支撑轴合件;201.支撑轴一;202.固定板;203.支撑轴二;3.转动臂;4.销轴;5.垫圈;6.开口销;7.助力弹簧;8.支撑臂合件;801.轴套;802.支撑臂;9.螺栓;10.离合踏板轴支架;11.油杯;12.平垫;13.螺栓;14.压盖;15.弹簧;16.离合助力泵;17.助力泵防尘罩;18.限位螺栓合件。
具体实施方式
下面结合附图和具体较佳实施方式对本发明作进一步详细的说明。
本发明的描述中,需要理解的是,术语“左侧”、“右侧”、“上部”、“下部”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,“第一”、“第二”等并不表示零部件的重要程度,因此不能理解为对本发明的限制。本实施例中采用的具体尺寸只是为了举例说明技术方案,并不限制本发明的保护范围。
如图3-1至图6-2所示,一种拖拉机离合操纵助力机构,包括离合踏板合件11、转动臂3、支撑臂802、固定板202、助力弹簧7;固定板202直接或间接安装在拖拉机车身上。
离合踏板合件1包含离合踏板101、踏板摇臂102、限位拉耳103、离合拉耳104、衬套105、踏板毂106。踏板毂106的一端转动安装在固定板202上,踏板毂106的另一端沿周向逆时针依次布设有踏板摇臂102、限位拉耳103和离合拉耳104;踏板摇臂102的另一端与离合踏板101连接;离合拉耳104的另一端与离合器的操纵拉杆铰接;衬套105同心安装于踏板毂106孔内,衬套105开设有润滑孔,当踩踏离合踏板101时,固定在踏板毂106上的踏板摇臂102、限位拉耳103、离合拉耳104均围绕踏板毂106转动的同时,踏板毂106也在围绕其中心转动。
支撑臂802的一端铰接在固定板202的上部,支撑臂802的另一端与助力弹簧7的一端固定连接;转动臂3的一端与限位拉耳103的另一端铰接,转动臂3的另一端铰接在支撑臂802的中部;助力弹簧7的另一端固定安装在拖拉机车身内部,通过控制离合踏板的踩踏角度,能将助力弹簧的回复力作为离合器分离传动系统的驱动力。
本实施例中,设置两个相互平行的转动臂3,在两个转动臂3的端部、限位拉耳103的端部均开设连接孔;将两个转动臂3的一端分别平行安装在限位拉耳103的两侧,且两个转动臂3的一端对齐后,利用销轴4穿过两个转动臂3的一端的连接孔、限位拉耳103的另一端的连接孔,在销轴4上套入垫圈5后,再用开口销6固定两个转动臂3的一端、限位拉耳103的另一端,利用同样的方式固定两个转动臂3的另一端、支撑臂802的一端,上述的两个转动臂3实现同时转动和平动。
当踩踏离合踏板101时,转动臂3实现转动和平动,从而实现助力弹簧7的拉伸并产生最大拉应力并开始收缩,助力弹簧的回复力正好作为离合踏板组件1彻底分离传动系统的驱动力。
实施例1
拖拉机离合操纵助力机构还包括支撑轴合件2,支撑轴合件2包括支撑轴一201、支撑轴二203。
在固定板202的上部和下部分别开设让支撑轴一201和支撑轴二203穿插的孔,支撑轴一201和支撑轴二203一端开设有润滑油道;支撑轴一201沿孔轴线方向固定连接在固定板202上方孔内,支撑轴一201用于将支撑臂802的一端铰接在固定板202的上部,在支撑臂802的一端的固定安装有轴套801,支撑轴一201依次套入支撑臂802的一端的轴套801、垫圈5后用开口销6进行轴端固定,支撑臂802在固定板202上可绕支撑轴一201转动。
支撑轴二203沿孔轴线方向固定连接在固定板202下方孔内支撑轴二203用于将离合踏板合件1的踏板毂106铰接在固定板202的下部。
实施例2
拖拉机离合操纵助力机构还包括离合踏板轴支架10,离合踏板轴支架固定安装在拖拉机车身相应的安装位置,离合踏板轴支架10上设有开档和孔,踏板毂106放入离合踏板轴支架10开档内并与离合踏板轴支架10开设的孔同心放置,且踏板毂106与离合踏板轴支架10之间设置平垫12,并且利用支撑轴二203配合螺栓9将离合踏板合件1固定在离合踏板轴支架10上,离合拉耳104的一端的孔与拖拉机离合器其他操纵连接,离合踏板合件1在离合踏板轴支架10可绕支撑轴二203转动,在踏板摇臂102和转动中心支撑轴二203的连线与水平线的夹角为踏板角度α,且离合拉耳104一端的孔与拖拉机离合器其他操纵连接。
根据上述的拖拉机离合操纵助力机构,提出一种拖拉机离合踏板助力方法,具体步骤如下:
步骤1、初始限位:初始时,如图3-2所示,使限位拉耳处于离合踏板轴支架的开档限位位置;假设踏板毂在固定板上的转动支点为A,转动臂与限位拉耳的铰支点为B,转动臂与支撑臂的铰支点为C,支撑臂在固定板上的铰支点为G,则此时:铰支点B位于点AC连线的左侧,且助力弹簧处于拉伸状态,具有设定的预拉应力;离合器与传动系统的操纵机构之间具有设定空程。
在初始限位时,令F1为助力弹簧的拉应力,L1为支撑臂的力臂,F2为F1反馈给转动臂的力,L2为转动臂的力臂,F3为F2等效到转动支点A的力,L3为限位拉耳的力臂,F4为助力弹簧反馈给踏板摇臂的助力,L4为踏板摇臂的力臂,如图3-21所示,对应受力关系如下:
F1*L1=F2*L2,
F2*L3=F4*L4,
F4=-(F1*L1)/(F2*L3)/L4,
有上述对应受力关系可知,此时助力弹簧的助力值为负值。
步骤2、助力弹簧拉伸:如图3-3所示,当拖拉机需要挂挡时,踩下离合踏板,离合踏板合件绕转动支点A顺指针旋转,直至离合器与传动系统的操纵机构相接触;在离合踏板合件旋转的过程中,离合踏板的踩踏力,只需克服助力弹簧的拉应力;当离合器与传动系统的操纵机构相接触时,铰支点B、转动支点A和铰支点C位于同一竖直直线,助力弹簧处于最大拉伸状态,助力弹簧的助力值为零,当此时助力弹簧具有最大拉应力;
步骤3、助力弹簧收缩并助力:如图3-4所示,继续踩踏离合踏板,逐步增大离合踏板的踩踏角度,离合器将带动传动系统的操纵机构动作,传动系统逐步分离;当离合踏板达到最大踩踏角度时,传动系统彻底分离;在传动系统分离的过程中,铰支点B位于点AC连线的右侧,且助力弹簧逐步回复收缩,助力弹簧的回复力将作为离合器分离传动系统的驱动力;当离合踏板达到最大踩踏角度时,助力弹簧处于最小拉伸状态;
在助力弹簧收缩并助力过程中,助力弹簧处于助力状态,如图3-41所示,此时对应受力关系如下:
F1*L1=F2*L2,
F2*L3=F4*L4,
F4=(F1*L1)/(F2*L3)/L4。
步骤4、助力弹簧复位:松开离合踏板,在助力弹簧恢复力的作用下,离合踏板将恢复至步骤1的初始状态。
当离合踏板达到最大踩踏角度时,此时离合器碟簧力大于助力弹簧拉应力与踏板自重及摩擦力之和,因此松开离合踏板,就可轻松的将离合踏板恢复至步骤1的初始状态。
在本实施例中,为了达到短时间助力离合器彻底分离的目的,在初始限位中,将初始状态下的离合踏板角度设为:30°≤α≤40°,助力弹簧7的初始拉应力设为大于等于100N,此时离合踏板角度与助力弹簧助力的关系变化曲线图如图7所示。
在本实施例中,为了操作人员可以方便的踩踏离合踏板,故将故将α的范围设为:30°≤α≤80°。
以上详细描述了本发明的优选实施方式,但是,本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换,这些等同变换均属于本发明的保护范围。
- 一种拖拉机离合操纵助力机构及助力方法
- 一种带液压助力的拖拉机离合器操纵机构