一种台阶清洁装置
文献发布时间:2023-06-19 12:11:54
技术领域
本发明涉及一种清洁工具,特别是涉及一种用于台阶清洁装置。
背景技术
越来越多的自动化设备运用于公共卫生领域,节省人力物力,但很多需要清洁的卫生区域还在用人力打扫,例如楼梯,现在很多高山上的台阶、地铁通道的台阶过于多,台阶打扫就成了大问题,需要投入大量的时间和人力去清扫,并且不容易清扫干净,现在亟需一种能够取代人力、自动清扫台阶的装置。
发明内容
本发明要解决的技术问题是一种能够取代人力、自动清扫台阶的装置。
本发明一种台阶清洁装置,包括顶板,其与第一支撑腿和第二支撑腿固定;
第一扫帚,其配置在顶板左侧;
垃圾存储箱,其与所述第一支撑腿固定连接;
驱动部,其通过电机驱动四连杆机构上下左右运动使第一支撑腿和第二支撑腿同步上下左右运动,并且通过电机驱动曲柄滑块机构使第一扫帚左右运动。
本发明一种台阶清洁装置,其中所述四连杆机构包括电机、输出轴、第一曲柄、第一连杆、第二曲柄、皮带、第一皮带轮、第二皮带轮、第一转动轴;
所述电机与顶板固定,所述电机的输出轴与所述第一曲柄的一端驱动连接,所述第一曲柄的另一端与所述第一连杆的一端铰链连接,所述第一连杆的中部与所述第二曲柄的一端铰链连接,所述第二曲柄的另一端与所述第一转动轴的一端固定连接,所述第一转动轴的另一端通过轴承安装在第二支撑腿上,所述第一转动轴与所述第二皮带轮同轴固定,所述第二皮带轮与所述第一皮带轮通过皮带带传动连接,所述第一皮带轮与所述输出轴驱动连接。
本发明一种台阶清洁装置,其中所述第一曲柄的一端通过间歇机构与所述电机的输出轴驱动连接,所述第一皮带轮也通过间歇机构与所述输出轴驱动连接;
所述间歇机构包括第一转动轮、第一齿牙、弧形凹槽、第二转动轮、第二转动轴、第二齿牙、第一凹槽、第二凹槽、拨杆、挡板;
所述电机的输出轴与所述第一转动轮同轴固定,所述第一转动轮一侧的外圆周面配置有所述第一齿牙,所述第一齿牙与所述第二齿牙能够啮合连接,所述第二齿牙配置在所述第二转动轮一侧的外圆周面上,所述第二转动轮与所述第二转动轴同轴固定,所述第二转动轴同轴固定有所述第一皮带轮,所述第二转动轴的一端通过轴承安装在在第二支撑腿上,所述第二转动轴的另一端与所述第一曲柄的一端固定,所述第二转动轮另一侧的外圆周面配置有弧形凹槽,所述弧形凹槽能够与所述第一转动轮的外圆周面搭接,所述第一转动轮配置有所述拨杆,所述拨杆能够与所述挡板搭接,所述挡板与第二转动轮固定连接,所述第一转动轮沿其外圆周面还开设有第一凹槽和第二凹槽。
本发明一种台阶清洁装置,其中所述曲柄滑块机构包括第三曲柄、第二连杆、导杆、第一导孔、第二导孔、第一固定杆;
所述电机的输出轴的一端与所述第三曲柄固定连接,所述第三曲柄的另一端与所述第二连杆的一端铰链连接,所述第二连杆的另一端与所述导杆铰链连接,所述导杆的一端套装在所述第一导孔内并沿其移动,所述第一导孔开设在第一支撑腿上,所述第二导孔开设在第二支撑腿上,所述导杆与与第一扫帚连接。
本发明一种台阶清洁装置,其中所述导杆通过传动机构与第一扫帚连接,所述传动机构包括齿条、扇形齿轮、第三转动轴,第二固定杆、第三固定杆、第二扫帚;
所述导杆与所述齿条的一端固定连接,所述齿条的另一端与所述第一扫帚连接,所述齿条与所述扇形齿轮啮合连接,所述扇形齿轮与所述第三转动轴的一端同轴固定,所述第三转动轴的另一端通过轴承安装在第一支撑腿上,所述扇形齿轮与所述第二固定杆的一端固定连接,所述第二固定杆的另一端与所述第二扫帚连接。
本发明一种台阶清洁装置,其中所述齿条通过调速机构与所述扇形齿轮啮合连接,所述调速机构包括第一齿轮、第四转动轴、第二齿轮、第五转动轴;
所述齿条与所述第一齿轮啮合连接,所述第一齿轮与所述第四转动轴的一端同轴固定,所述第四转动轴的另一端通过轴承安装在第一支撑腿上,所述第一齿轮与所述第二齿轮啮合连接,所述第二齿轮与所述第五转动轴的一端同轴固定,所述第五转动轴另一端通过轴承安装在第一支撑腿上,所述第二齿轮与所述扇形齿轮啮合连接。
本发明一种台阶清洁装置,其中所述一种台阶清洁装置包括第一电磁控制机构,所述电磁控制机构第四固定杆、第一电磁铁、第一磁铁。
所述齿条与所述第一扫帚铰链连接,所述齿条侧面固定有第一电磁铁,所述第一电磁铁与所述第一磁铁能够搭接,所述第一磁铁固定在第一扫帚的侧面,所述齿条与所述第四固定杆固定连接,所述第四固定杆与所述第一扫帚搭接。
本发明一种台阶清洁装置,其中所述一种台阶清洁装置包括第二电磁控制机构,所述电磁控制机构第五固定杆、第二电磁铁、第二磁铁。
所述第二固定杆与所述第二扫帚铰链连接,所述第二固定杆侧面固定有第二电磁铁,所述第二电磁铁与所述第二磁铁能够搭接,所述第二磁铁固定在第二扫帚的侧面,所述第二固定杆与所述第五固定杆固定连接,所述第五固定杆与所述第二扫帚搭接。
本发明一种台阶清洁装置与现有技术不同之处在于本发明一种台阶清洁装置通过电机驱动四连杆机构使第一支撑腿和第二支撑腿上下左右运动,实现跨越台阶,向前运动,同时通过电机驱动曲柄滑块机构左右运动,从而带动第一扫帚左右运动清扫台阶,在此基础上还能通过间歇机构的间隙功能使四连杆机构不运动的时候留出时间的空隙,让曲柄滑块机构和传动机构够有更多的时间使第一扫帚和第二扫帚扫动,使清洁效率增高。
下面结合附图对本发明的一种台阶清洁装置作进一步说明。
附图说明
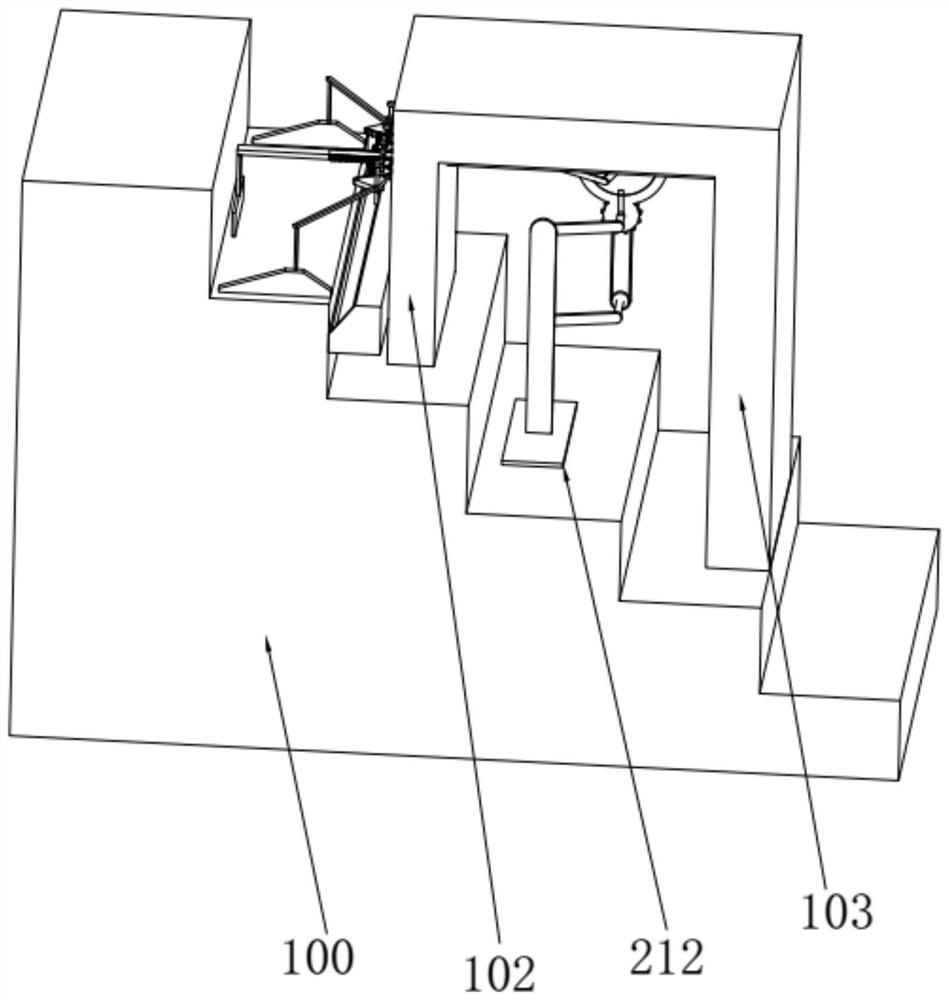
图1是一种台阶清洁装置的轴侧图;
图2是图1所示一种台阶清洁装置的侧视图;
图3是图1的俯视图;
图4是图3的局部放大图;
图5是图3的局部放大图;
图6是图2的结构边形图;
图7是图3的结构边形图。
具体实施方式
如图1~6所示,参照图1~3,本发明一种台阶清洁装置包括顶板101,其与第一支撑腿102和第二支撑腿103固定;
第一扫帚307,其配置在顶板101左侧;
垃圾存储箱104,其与所述第一支撑腿102固定连接;
驱动部,其通过电机201驱动四连杆机构上下左右运动使第一支撑腿102和第二支撑腿103同步上下左右运动,并且通过电机201驱动曲柄滑块机构使第一扫帚307左右运动。
本发明通过电机201驱动四连杆机构使第一支撑腿102和第二支撑腿上下左右运动,实现跨越台阶,向前运动,同时通过电机201驱动曲柄滑块机构左右运动,从而带动第一扫帚307左右运动清扫台阶。
其中,垃圾存储箱104与所述第一支撑腿102为可拆卸滑动连接,垃圾存储箱104配置有燕尾形滑块,第一支撑腿102侧面开设燕尾槽,使垃圾存储箱104在存储满垃圾后能够拆卸,方便拆卸倒掉垃圾。
其中,第一支撑腿102和第二支撑腿103一高一矮,高度差为一个台阶的高度,例如第一支撑腿102在第三级台阶,则第二支撑腿103在第一级台阶,使整体结构能够放置在台阶上更加稳固。
其中,所述电机201的电源模块包括电池、电控模块、无线通信模块,所述无线通讯模块与用户终端无线连接。本发明通过用户终端控制使电机201可自由的调节旋转方向和转速,从而调整跨越台阶的快慢。
作为本实例的进一步解释,参照图2~5,所述四连杆机构包括电机201、输出轴202、第一曲柄205、第一连杆206、第二曲柄207、皮带208、第一皮带轮209、第二皮带轮210、第一转动轴211;
所述电机201与顶板101固定,所述电机201的输出轴202与所述第一曲柄205的一端驱动连接,所述第一曲柄205的另一端与所述第一连杆206的一端铰链连接,所述第一连杆206的中部与所述第二曲柄207的一端铰链连接,所述第二曲柄207的另一端与所述第一转动轴211的一端固定连接,所述第一转动轴211的另一端通过轴承安装在第二支撑腿103上,所述第一转动轴211与所述第二皮带轮210同轴固定,所述第二皮带轮210与所述第一皮带轮209通过皮带208带传动连接,所述第一皮带轮209与所述输出轴202驱动连接。
本发明通过电机201驱动第一曲柄205和第二曲柄207逆时针转动,从而带动第一连杆206左右上下往复运动,当206从右向左、从上到下运到能够到最低点即第一曲柄205、第一连杆206、第二曲柄207呈竖直状态时,带动第一支撑腿102和第二支撑腿103脱离台阶向左上升,此时支撑板212作为与台阶100的支撑点,继续运动,当第一连杆206从左向右、从上到上运到能够到最高点即第一曲柄205、第一连杆206、第二曲柄207呈竖直状态时,带动第一支撑腿102和第二支撑腿103脱离台阶向右下落,此时第一支撑腿102和第二支撑腿103作为与台阶100的支撑点,支撑板212不与台阶接触。
其中,所述第一连杆206的与支撑板212固定连接,所述支撑板212与地面接触,支撑板212能够增加与台阶的接触面积,增加稳定性。
其中,所述第一曲柄205、第二曲柄207的长度相等,并且所述第一曲柄205、第二曲柄207的长度等于台阶的高度,从而实现拾级而上的功能。
其中,本领域技术人员能够通过计算调整第一曲柄205、第二曲柄207、第一支撑腿102和第二支撑腿103的长度适应不同高度的台阶。
作为本实例的进一步解释,参照图4,所述第一曲柄205的一端通过间歇机构与所述电机201的输出轴202驱动连接,所述第一皮带轮209也通过间歇机构与所述输出轴202驱动连接;
所述间歇机构包括第一转动轮605、第一齿牙601、弧形凹槽603、第二转动轮204、第二转动轴203、第二齿牙604、第一凹槽606、第二凹槽607、拨杆606、挡板609;
所述电机201的输出轴202与所述第一转动轮605同轴固定,所述第一转动轮605一侧的外圆周面配置有所述第一齿牙601,所述第一齿牙601与所述第二齿牙604能够啮合连接,所述第二齿牙604配置在所述第二转动轮204一侧的外圆周面上,所述第二转动轮204与所述第二转动轴203同轴固定,所述第二转动轴203同轴固定有所述第一皮带轮209,所述第二转动轴203的一端通过轴承安装在在第二支撑腿103上,所述第二转动轴203的另一端与所述第一曲柄205的一端固定,所述第二转动轮204另一侧的外圆周面配置有弧形凹槽603,所述弧形凹槽603能够与所述第一转动轮605的外圆周面搭接,所述第一转动轮605配置有所述拨杆606,所述拨杆606能够与所述挡板609搭接,所述挡板609与第二转动轮204固定连接,所述第一转动轮605沿其外圆周面还开设有第一凹槽606和第二凹槽607。
本发明通过驱动第一转动轮605转动,当拨杆606拨动挡板609,第一齿牙601和第二齿牙604啮合时,带动第二转动轮204转动,从而使四连杆机构运动,当第一齿牙601和第二齿牙604啮合结束,第一转动轮605的外圆周面和弧形凹槽603搭接,第二转动轮204不转动,从而使四连杆机构不运动,形成间歇运动,实现跨越一个台阶后间歇一段时间再跨越台阶,在这个时间段内曲柄滑块机构能够带动第一扫帚清扫台阶,相比不间歇运动,本发明使清扫时间更长,清扫效果更好。
其中,第一转动轮605与第二转动轮204的传动比为1:2,第一齿牙601和第一齿牙602沿各自转动轮外圆周面方向分布所占的弧长比为1:2,每当第一齿牙601和第二齿牙604啮合一次,第二转动轮204转动一圈,从而带动四连杆机构能够形成一个完整的上下左右运动,跨越一个台阶。
其中,第一转动轮605的外圆周面和第二弧形面603的形状相配合,使第二转动轮204在第一齿牙601和第二齿牙604啮合结束后不再转动。
其中,所述第一齿牙601和第二齿牙604沿圆周方向设置多个,并局部连续分布。
其中,所述拨杆608垂直于第一转动轮605的端面固定,并且位于第一齿牙601与第一转动轮605的外圆周面接壤处。
其中,挡板609与第二转动轮204固定连接,并且位于弧形凹槽角平分线上。
其中,所述第一凹槽606和第二凹槽607开设在第一转动轮605的外圆周面与第一齿牙601接壤处,保证第一齿牙601与第二齿牙604能够啮合。
作为本实例的进一步解释,参照图2~3和图6~7,所述曲柄滑块机构包括第三曲柄301、第二连杆302、导杆303、第一导孔304、第二导孔305、第一固定杆306;
所述电机201的输出轴202的一端与所述第三曲柄301固定连接,所述第三曲柄301的另一端与所述第二连杆302的一端铰链连接,所述第二连杆302的另一端与所述导杆303铰链连接,所述导杆303的一端套装在所述第一导孔304内并沿其移动,所述第一导孔304开设在第一支撑腿102上,所述第二导孔305开设在第二支撑腿103上,所述导杆303与与第一扫帚307连接。
本发明通过电机201驱动第三曲柄301转动,使第二连杆302带动导杆303左右运动,从而使第一扫帚307在台阶上左右运动,清扫垃圾。
其中,所述第一导孔304和第二导孔305水平对称设置,使导杆303运动更加稳定,支撑性更强。
其中,所述导杆303的另一端套装在所述第二导孔305内并沿其移动。
其中,所述导杆303与第一扫帚307固定连接。其中,所述导杆303与所述第一固定杆306的一端固定连接,所述第一固定杆306的另一端与第一扫帚307固定。
作为本实例的进一步解释,参照图2~3和图6~7,所述导杆303通过传动机构与第一扫帚307连接,所述传动机构包括齿条501、扇形齿轮506、第三转动轴507,第二固定杆508、第三固定杆509、第二扫帚510;
所述导杆304与所述齿条501的一端固定连接,所述齿条501的另一端与所述第一扫帚307连接,所述齿条501与所述扇形齿轮506啮合连接,所述扇形齿轮506与所述第三转动轴507的一端同轴固定,所述第三转动轴507的另一端通过轴承安装在第一支撑腿102上,所述扇形齿轮506与所述第二固定杆508的一端固定连接,所述第二固定杆508的另一端与所述第二扫帚510连接。
本发明通过导杆304左右运动,使扇形齿轮506旋转,从而带动第三固定杆509开合运动,使第二扫帚510开合运动,清扫地面,将周边垃圾清扫干净,清扫第一扫帚307不能够清扫的盲区,使台阶更加干净。
其中,所述齿条501的另一端与所述第一扫帚307固定连接。其中,所述齿条501与所述第一固定杆306的一端固定连接,所述第一固定杆306的另一端与第一扫帚307固定。
其中,所述传动机构关于水平方向对称设置,使清扫面积更大,并且效率更高。
其中,所述第二扫帚510的材质为柔软的塑料,使其碰到台阶侧壁不会出现损坏。
其中,所述第二固定杆508的另一端与所述第二扫帚510固定连接。其中,所述第二固定杆508的另一端与所述第三固定杆509的一端固定连接,所述第三固定杆509的另一端与所述第二扫帚510固定。
作为本实例的进一步解释,参照图2~3和图6~7,所述齿条501通过调速机构与所述扇形齿轮506啮合连接,所述调速机构包括第一齿轮502、第四转动轴503、第二齿轮504、第五转动轴505;
所述齿条501与所述第一齿轮502啮合连接,所述第一齿轮502与所述第四转动轴503的一端同轴固定,所述第四转动轴503的另一端通过轴承安装在第一支撑腿102上,所述第一齿轮502与所述第二齿轮504啮合连接,所述第二齿轮504与所述第五转动轴505的一端同轴固定,所述第五转动轴505另一端通过轴承安装在第一支撑腿102上,所述第二齿轮504与所述扇形齿轮506啮合连接。
本发明通过第三齿牙501左右运动,使第一齿轮502转动,从而带动第二齿轮504转动,使扇形齿轮506转动,从而实现第二扫帚510开合运动,清扫地面,通过齿轮的传动改变转动速度,本发明实现的效果是:当501带动502转动一圈,使504转动多圈,从而带动507转动幅度更大,在前面所述间歇机构的驱使下,跨越台阶,不运动时,本发明以及曲柄滑块机构使每个台阶的清扫次数增多,清洁度增高。
其中,参照图3,所述调速机构关于齿条501的水平方向的中心线对称设置。
其中,所述第一齿轮502与所述第二齿轮504的传动比为1:2。所述第二齿轮504与所述扇形齿轮506的传动比为1:2。
作为本实例的进一步解释,参照图2~3和图5,一种台阶清洁装置包括第一电磁控制机构,所述电磁控制机构第四固定杆701、第一电磁铁703、第一磁铁702。
所述齿条501与所述第一扫帚307铰链连接,所述齿条501侧面固定有第一电磁铁703,所述第一电磁铁703与所述第一磁铁702能够搭接,所述第一磁铁702固定在第一扫帚307的侧面,所述齿条501与所述第四固定杆701固定连接,所述第四固定杆701与所述第一扫帚307搭接。
本发明使第一扫帚307向左运动时,通过电第一磁铁702通电,与磁铁703相互吸引,带动第一扫帚307转动收起,从而减少扬尘和避免将垃圾扫到台阶根部,在第一扫帚307向右运动时,通过第一电磁铁702断电,与磁铁703搭接失效,使第一扫帚307放下,清扫台阶。
其中,第四固定杆701可以使第一扫帚307在向右运动时,受到垃圾和地面施加的向左的力时给予支撑,使第一扫帚307不翻转,能够有效清扫垃圾。
其中,所述电第一磁铁702的电源模块包括电池、电控模块、无线通信模块,所述无线通讯模块与用户终端无线连接。本发明通过用户终端控制使第一电磁铁702的通断电,从而调整第一扫帚307的收放。
作为本实例的进一步解释,参照图2~3和图5,一种台阶清洁装置包括第二电磁控制机构,所述电磁控制机构第五固定杆801、第二电磁铁803、第二磁铁802。
所述第二固定杆508与所述第二扫帚510铰链连接,所述第二固定杆508侧面固定有第二电磁铁803,所述第二电磁铁803与所述第二磁铁802能够搭接,所述第二磁铁802固定在第二扫帚510的侧面,所述第二固定杆508与所述第五固定杆801固定连接,所述第五固定杆801与所述第二扫帚510搭接。
本发明使第二扫帚510向后运动时,通过电第二磁铁802通电,与磁铁703相互吸引,带动第二扫帚510转动收起,从而减少扬尘和避免将垃圾扫到台阶根部,在第二扫帚510向前运动时,通过第二电磁铁802断电,与磁铁703搭接失效,使第二扫帚510放下,清扫台阶。
参照图5,其中,第五固定杆801可以使第二扫帚510在向前运动时,受到垃圾和地面施加的向后的力时给予支撑,使第二扫帚510不翻转,能够有效清扫垃圾。
其中,所述电第二磁铁802的电源模块包括电池、电控模块、无线通信模块,所述无线通讯模块与用户终端无线连接。本发明通过用户终端控制使第二电磁铁802的通断电,从而调整第二扫帚510的收放。
以上所述的实施例仅仅是对本发明的优选实施方式进行描述,并非对本发明的范围进行限定,在不脱离本发明设计精神的前提下,本领域普通技术人员对本发明的技术方案作出的各种变形和改进,均应落入本发明权利要求书确定的保护范围内。
- 一种台阶清洁装置
- 一种基于双目视觉的台阶检测和单级台阶高度估计方法