一种钉仓角度精确定位的吻合器
文献发布时间:2023-06-19 12:14:58
技术领域
本发明涉及医疗设备技术领域,更具体地说,涉及一种钉仓角度精确定位的吻合器。
背景技术
吻合器是世界上首例缝合器,用于胃肠吻合已近一个世纪,直到1978年管型吻合器才广泛用于胃肠手术,一般分为一次性或多次使用的吻合器,进口或国产吻合器,它是医学上使用的替代传统手工缝合的设备,由于现代科技的发展和制作技术的改进,临床上使用的吻合器质量可靠,使用方便,严密、松紧合适,尤其是其缝合快速、操作简便及很少有副作用和手术并发症等优点,还使得过去无法切除的肿瘤手术得以病灶切除。
但是现有的吻合器进行钉仓关节处进行左右角度转动时,只能粗略弯折一个需要的角度,并且无法进行精确稳定的定位,然而人体内的结构复杂,弯转十五度、三十度和四十五度等大致角度并不能完全适应手术的需求,因此,本领域技术人员提供了一种钉仓角度精确定位的吻合器,以解决上述背景技术中提出的问题。
发明内容
1.要解决的技术问题
针对现有技术中存在的问题,本发明的目的在于提供一种钉仓角度精确定位的吻合器,其优点在于可以在使吻合器钉仓的关节处进行四十五度内多种角度的调整,提高了吻合器的适应性,使手术更加精确。
2.技术方案
为解决上述问题,本发明采用如下的技术方案:一种钉仓角度精确定位的吻合器,包括手柄壳体,所述手柄壳体的顶部设置有转动机构,所述转动机构贯穿手柄壳体并沿至手柄壳体的内部,所述手柄壳体的左侧固定连接有连接座,所述连接座的内壁转动连接有弯转机构,所述弯转机构的左侧固定连接有钉仓,所述手柄壳体的内壁固定连接有限位管,所述限位管的内部设置有软性推动杆,所述软性推动杆依次贯穿限位管、手柄壳体、连接座、弯转机构和钉仓并延伸至钉仓的内部,所述限位管的正面和背面均滑动连接有调节杆,且调节杆依次贯穿手柄壳体和连接座并与弯转机构固定连接。
进一步地:所述调节杆的有右侧转动连接有与调节机构固定连接的皮带,所述手柄壳体的内壁正面和背面均固定连接有数量为三个的滑轮,每个所述滑轮均通过皮带传动连接,所述转动机构包括固定套,所述固定套与手柄壳体的内顶壁固定连接,固定套的底部固定连接有固定板,所述手柄壳体的顶部设置有旋钮,所述旋钮的顶部固定连接有连接杆,所述连接杆依次贯穿手柄壳体、固定套和固定板并延伸至固定板的下方,所述连接杆的底部固定连接有第一锥形齿轮。
进一步地,所述手柄壳体的顶部设置有旋转机构,所述旋转机构贯穿手柄壳体并延伸至手柄壳体的内部,所述手柄壳体的内顶壁固定连接有与旋转机构啮合连接的调节机构,所述调节机构包括数量为两个的收束柱,所述手柄壳体的内顶壁和内底壁均固定连接有数量为两个的轴承座,上方两个所述轴承座的内缘均固定连接有第二转动柱,下方两个所述轴承座的内缘均固定连接有与收束柱底部固定连接的第一转动柱,所述第二转动柱的下方固定连接有与收束柱顶部第一齿轮,两个所述皮带分别缠绕于收束柱的表面,两个所述皮带的缠绕方向相反。
进一步地:所述旋转机构包括固定环和旋转杆,所述固定环与手柄壳体的内顶壁固定连接,所述固定环的内壁固定连接有轴承,所述旋转杆的表面与轴承的内缘固定连接,且旋转杆的贯穿手柄壳体并延伸至手柄壳体的外部,所述旋转杆的顶部固定连接有旋转手柄,所述旋转杆的顶部固定连接有与第一齿轮啮合连接的第二齿轮。
进一步地:所述转动机构的底部固定连接有与旋转机构啮合连接的锁止机构,所述锁止机构包括固定座,所述固定座与固定板的底部固定连接,所述固定座的内壁活动连接有转动座,所述转动座的右侧固定连接有转动杆,所述转动杆贯穿固定座并延伸至固定座的外部,所述转动杆的右侧固定连接有与第一锥形齿轮啮合连接的第二锥形齿轮。
进一步地:所述转动座的内壁螺纹连接有螺杆,所述螺杆贯穿固定座并延伸至固定座的外部,所述螺杆的左侧转动连接有锁止板,所述锁止板与第一齿轮啮合连接,所述锁止板的右侧固定连接有限位杆,所述限位杆贯穿固定座并沿至固定座的内部。
进一步地:所述弯转机构包括连接头,所述连接头的顶部和底部均固定连接有与连接座转动连接的第三转动柱,所述连接头的内壁固定连接有数量为两个的固定杆,所述固定杆的表面转动连接有转动套,所述转动套的右侧与调节杆固定连接。
进一步地:所述限位管的正面和背面均开设有滑槽,两个所述调节杆靠近限位管的依次均固定连接有数量为两个的滑块,所述滑块贯穿滑槽并延伸至滑槽的内部。
3.有益效果
相比于现有技术,本发明的优点在于:
(1)本方案通过设置皮带、滑轮、弯转机构和调节机构,调节机构中的两个收束柱分别带动两个皮带在滑轮上向相反方向进行滑动,皮带带动两个调节杆向着相反方向移动,从而两个调节杆带动弯转机构和钉仓进行左右方位的调整,使吻合器钉仓可以进行四十五度内多种角度的调整,提高了吻合器的适应性,使手术更加精确,通过设置转动机构,使用者通过旋转转动机构中的旋钮,旋钮带动连接杆转动,连接杆带动第一锥形齿轮进行转动,第一锥形齿轮带动第二锥形齿轮转动,从而方便使用者通过转动旋钮对锁止机构进行调节,方便使用者随时对第二齿轮进行限位,从而保证了钉仓角度的稳定性。
(2)通过设置第一齿轮,两个第一齿轮在受到第二齿轮的带动同时转动,两个第一齿轮带动两个收束柱进行同时转动,从而使两个收束柱可以同时带动两个皮带进行移动,保证钉仓角度调整时的稳定性,通过设置收束柱,两个收束柱表面缠绕的皮带方向相反,从而可以带动两个调节杆向着相反反向移动,以此带动弯转机构和钉仓进行角度的调整,提高吻合器的实用性;
(3)通过设置旋转机构,使用者通过转动旋转手柄带动旋转杆进行转动,旋转杆带动轴承的内缘进行转动的同时也带动第二齿轮进行转动,从而使第二齿轮啮合电带动第一齿轮进行转动,方便使用者随时通过旋转机构调节钉仓的弯转角度;
(4)通过设置弯转机构,调节杆带动转动套在固定杆的表面进行转动的同时,也通过固定杆带动连接头进行左右转动,连接头带动钉仓进行转动,使得钉仓可以稳定地进行左右角度弯转,并且能够固定在相应位置保持不动,提高吻合器的适应性和稳定性;
(5)通过设置锁止机构,第二锥形齿轮在第一锥形齿轮的带动进行转动,第二锥形齿轮通过转动杆带动转动座进行转动,转动座螺纹带动螺杆进行移动,螺杆带动锁止板对第二齿轮进行啮合限位,从而防止第二齿轮发生位置偏移,保证钉仓弯转后的稳定性,通过设置限位杆,限位杆在锁止板的带动下在转动座内进行滑动,从而防止锁止板在移动时发生位置偏移,提高锁止板的稳定性;
(6)通过设置滑块和滑槽,滑块随着调节杆的移动在滑槽中进行滑动,避免了调节杆在移动过程中出现位置偏移,提高了钉仓弯转时的稳定性和精确性。
附图说明
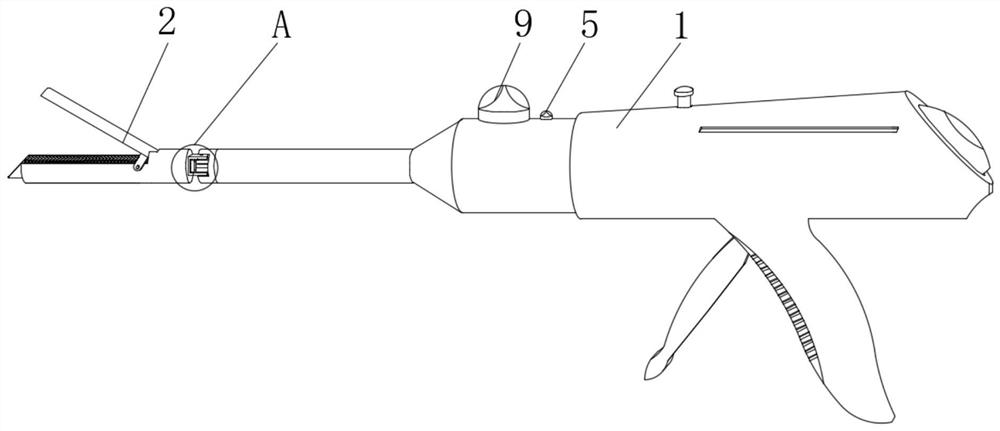
图1为本发明的立体图;
图2为本发明的正面剖视图;
图3为本发明的俯视图;
图4为本发明的侧视图;
图5为本发明图1中A处的放大图;
图6为本发明图2中B处的放大图;
图7为本发明图3中C处的放大图。
图中标号说明:
1、手柄壳体;2、钉仓;3、限位管;301、滑槽;4、调节机构;401、轴承座;402、第一转动柱;403、第二转动柱;404、第一齿轮;405、收束柱;5、转动机构;501、固定套;502、旋钮;503、连接杆;504、第一锥形齿轮;505、固定板;6、锁止机构;601、固定座;602、螺杆;603、锁止板; 604、转动杆;605、第二锥形齿轮;606、限位杆;607、转动座;7、调节杆; 701、滑块;8、弯转机构;801、连接头;802、固定杆;803、转动套;804、第三转动柱;9、旋转机构;901、旋转手柄;902、固定环;903、轴承;904、旋转杆;905、第二齿轮;10、软性推动杆;11、连接座;12、滑轮;13、皮带。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述;显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-7,本发明实施例中,一种钉仓角度精确定位的吻合器,包括手柄壳体1,手柄壳体1的顶部设置有旋转机构9,旋转机构9贯穿手柄壳体 1并延伸至手柄壳体1的内部,手柄壳体1的内顶壁固定连接有与旋转机构9 啮合连接的调节机构4,手柄壳体1的顶部设置有转动机构5,转动机构5贯穿手柄壳体1并沿至手柄壳体1的内部,转动机构5的底部固定连接有与旋转机构9啮合连接的锁止机构6,手柄壳体1的左侧固定连接有连接座11,连接座11的内壁转动连接有弯转机构8,弯转机构8的左侧固定连接有钉仓 2,手柄壳体1的内壁固定连接有限位管3,限位管3的内部设置有软性推动杆10,软性推动杆10依次贯穿限位管3、手柄壳体1、连接座11、弯转机构 8和钉仓2并延伸至钉仓2的内部,限位管3的正面和背面均滑动连接有调节杆7,且调节杆7依次贯穿手柄壳体1和连接座11并与弯转机构8固定连接,调节杆7的有右侧转动连接有与调节机构4固定连接的皮带13,手柄壳体1 的内壁正面和背面均固定连接有数量为三个的滑轮12,每个滑轮12均通过皮带13传动连接,通过设置皮带13、滑轮12、弯转机构8和调节机构4,调节机构4中的两个收束柱405分别带动两个皮带13在滑轮12上向相反方向进行滑动,皮带13带动两个调节杆7向着相反方向移动,从而两个调节杆7带动弯转机构8和钉仓2进行左右方位的调整,使吻合器钉仓2可以进行四十五度内多种角度的调整,提高了吻合器的适应性,使手术更加精确。
参阅图2、图3、图4,调节机构4包括数量为两个的收束柱405,手柄壳体1的内顶壁和内底壁均固定连接有数量为两个的轴承座401,上方两个轴承座401的内缘均固定连接有第二转动柱403,下方两个轴承座401的内缘均固定连接有与收束柱405底部固定连接的第一转动柱402,第二转动柱403的下方固定连接有与收束柱405顶部第一齿轮404,通过设置第一齿轮404,两个第一齿轮404在受到第二齿轮905的带动同时转动,两个第一齿轮404带动两个收束柱405进行同时转动,从而使两个收束柱405可以同时带动两个皮带13进行移动,保证钉仓2角度调整时的稳定性。
参阅图3、图4,两个皮带13分别缠绕于收束柱405的表面,两个皮带 13的缠绕方向相反,通过设置收束柱405,两个收束柱405表面缠绕的皮带 13方向相反,从而可以带动两个调节杆7向着相反反向移动,以此带动弯转机构8和钉仓2进行角度的调整,提高吻合器的实用性。
参阅图1、图4,旋转机构9包括固定环902和旋转杆904,固定环902 与手柄壳体1的内顶壁固定连接,固定环902的内壁固定连接有轴承903,旋转杆904的表面与轴承903的内缘固定连接,且旋转杆904的贯穿手柄壳体1 并延伸至手柄壳体1的外部,旋转杆904的顶部固定连接有旋转手柄901,旋转杆904的顶部固定连接有与第一齿轮404啮合连接的第二齿轮905,通过设置旋转机构9,使用者通过转动旋转手柄901带动旋转杆904进行转动,旋转杆904带动轴承903的内缘进行转动的同时也带动第二齿轮905进行转动,从而使第二齿轮905啮合电带动第一齿轮404进行转动,方便使用者随时通过旋转机构9调节钉仓2的弯转角度。
参阅图1、图2、图6,转动机构5包括固定套501,固定套501与手柄壳体1的内顶壁固定连接,固定套501的底部固定连接有固定板505,手柄壳体1的顶部设置有旋钮502,旋钮502的顶部固定连接有连接杆503,连接杆 503依次贯穿手柄壳体1、固定套501和固定板505并延伸至固定板505的下方,连接杆503的底部固定连接有第一锥形齿轮504,通过设置转动机构5,使用者通过旋转转动机构5中的旋钮502,旋钮502带动连接杆503转动,连接杆503带动第一锥形齿轮504进行转动,第一锥形齿轮504带动第二锥形齿轮605转动,从而方便使用者通过转动旋钮502对锁止机构6进行调节,方便使用者随时对第二齿轮905进行限位,从而保证了钉仓2角度的稳定性。
参阅图2、图6,锁止机构6包括固定座601,固定座601与固定板505 的底部固定连接,固定座601的内壁活动连接有转动座607,转动座607的右侧固定连接有转动杆604,转动杆604贯穿固定座601并延伸至固定座601的外部,转动杆604的右侧固定连接有与第一锥形齿轮504啮合连接的第二锥形齿轮605,通过设置锁止机构6,第二锥形齿轮605在第一锥形齿轮504的带动进行转动,第二锥形齿轮605通过转动杆604带动转动座607进行转动,转动座607螺纹带动螺杆602进行移动,螺杆602带动锁止板603对第二齿轮905进行啮合限位,从而防止第二齿轮905发生位置偏移,保证钉仓2弯转后的稳定性。
参阅图2、图6,转动座607的内壁螺纹连接有螺杆602,螺杆602贯穿固定座601并延伸至固定座601的外部,螺杆602的左侧转动连接有锁止板 603,锁止板603与第一齿轮404啮合连接,锁止板603的右侧固定连接有限位杆606,限位杆606贯穿固定座601并沿至固定座601的内部,通过设置限位杆606,限位杆606在锁止板603的带动下在转动座607内进行滑动,从而防止锁止板603在移动时发生位置偏移,提高锁止板603的稳定性。
参阅图1、图2、图3、图5,弯转机构8包括连接头801,连接头801的顶部和底部均固定连接有与连接座11转动连接的第三转动柱804,连接头801 的内壁固定连接有数量为两个的固定杆802,固定杆802的表面转动连接有转动套803,转动套803的右侧与调节杆7固定连接,通过设置弯转机构8,调节杆7带动转动套803在固定杆802的表面进行转动的同时,也通过固定杆 802带动连接头801进行左右转动,连接头801带动钉仓2进行转动,使得钉仓2可以稳定的进行左右角度弯转,提高吻合器的适应性。
参阅图3、图7,限位管3的正面和背面均开设有滑槽301,两个调节杆 7靠近限位管3的依次均固定连接有数量为两个的滑块701,滑块701贯穿滑槽301并延伸至滑槽301的内部,通过设置滑块701和滑槽301,滑块701随着调节杆7的移动在滑槽301中进行滑动,避免了调节杆7在移动过程中出现位置偏移,提高了钉仓2弯转时的稳定性和精确性。
本发明的工作原理是:在需要改变钉仓2的弯转角度时,首先通过旋转转动机构5中的第一锥形齿轮504带动锁止机构6中的第二锥形齿轮605转动,通过设置转动机构5,使用者通过旋转转动机构5中的旋钮502,旋钮502 带动连接杆503转动,连接杆503带动第一锥形齿轮504进行转动,第一锥形齿轮504带动第二锥形齿轮605转动,从而方便使用者通过转动旋钮502 对锁止机构6进行调节,方便使用者随时对第二齿轮905进行限位,从而保证了钉仓2角度的稳定性,从而使锁止板603带动限位杆606进行移动的同时,通过设置限位杆606,限位杆606在锁止板603的带动下在转动座607内进行滑动,从而防止锁止板603在移动时发生位置偏移,提高锁止板603的稳定性,锁止板603与旋转机构9中的第二齿轮905的连接关系脱离,通过设置锁止机构6,第二锥形齿轮605在第一锥形齿轮504的带动进行转动,第二锥形齿轮605通过转动杆604带动转动座607进行转动,转动座607螺纹带动螺杆602进行移动,螺杆602带动锁止板603对第二齿轮905进行啮合限位,从而防止第二齿轮905发生位置偏移,保证钉仓2弯转后的稳定性,随后转动旋转机构9中的旋转手柄901,通过设置旋转机构9,使用者通过转动旋转手柄901带动旋转杆904进行转动,旋转杆904带动轴承903的内缘进行转动的同时也带动第二齿轮905进行转动,从而使第二齿轮905啮合电带动第一齿轮404进行转动,方便使用者随时通过旋转机构9调节钉仓2的弯转角度,使第二齿轮905啮合带动调节机构4中的两个第一齿轮404进行同时转动,通过设置第一齿轮404,两个第一齿轮404在受到第二齿轮905的带动同时转动,两个第一齿轮404带动两个收束柱405进行同时转动,从而使两个收束柱405可以同时带动两个皮带13进行移动,保证钉仓2角度调整时的稳定性,随后调节机构4中的收束柱405带动两个皮带13在滑轮12上进行相反方向滑动,通过设置收束柱405,两个收束柱405表面缠绕的皮带 13方向相反,从而可以带动两个调节杆7向着相反反向移动,以此带动弯转机构8和钉仓2进行角度的调整,提高吻合器的实用性,两个皮带13在带动调节杆7进行移动,调节杆7带动滑块701在滑槽301中进行滑动,通过设置滑块701和滑槽301,滑块701随着调节杆7的移动在滑槽301中进行滑动,避免了调节杆7在移动过程中出现位置偏移,提高了钉仓2弯转时的稳定性和精确性,然后调节杆7带动弯转机构8进行左右弯转,通过设置弯转机构8,调节杆7带动转动套803在固定杆802的表面进行转动的同时,也通过固定杆802带动连接头801进行左右转动,连接头801带动钉仓2进行转动,使得钉仓2可以稳定的进行左右角度弯转,提高吻合器的适应性,弯转机构8 带动钉仓2进行弯转,最后反转旋钮502,使锁止板603重新与第二齿轮905 重新啮合即可,通过设置皮带13、滑轮12、弯转机构8和调节机构4,调节机构4中的两个收束柱405分别带动两个皮带13在滑轮12上向相反方向进行滑动,皮带13带动两个调节杆7向着相反方向移动,从而两个调节杆7带动弯转机构8和钉仓2进行左右方位的调整,使吻合器钉仓2可以进行四十五度内多种角度的调整,提高了吻合器的适应性,使手术更加精确。
以上所述,仅为本发明较佳的具体实施方式;但本发明的保护范围并不局限于此。任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其改进构思加以等同替换或改变,都应涵盖在本发明的保护范围内。
- 一种钉仓角度精确定位的吻合器
- 一种吻合器钉仓用定位机构