转速和/或旋转角度感测单元和工作设备
文献发布时间:2023-06-19 12:14:58
技术领域
本发明涉及一种转速和/或旋转角度感测单元和一种工作设备。本发明尤其涉及一种转矩感测装置,所述转矩感测装置用于尤其主动地感测可通过肌力和/或马达力驱动的工作设备和尤其车辆的轴和尤其曲轴围绕曲轴的旋转轴线的转速和/或旋转角度,并且涉及一种可通过肌力和/或马达力驱动的工作设备、车辆、自行车、电动自行车、电动单车(eBike)、电动脚踏车或类似物。
背景技术
在监测和/或控制例如在车辆技术领域中的驱动设备时经常期望的是,感测驱动单元的所基于的轴的转速和/或旋转角度并且因此感测所述轴的取向。
为此,传统地例如使用机械器件来探测轴的表面,以便能够通过直接的机械耦合推断出轴的转速和/或旋转角度并且因此推断出所述轴的取向。
在此,不利的是在机械量取时不足的精确度和所基于的轴的旋转和取向由于机械量取的影响。
发明内容
根据本发明的具有独立权利要求1的特征的转速和/或旋转角度感测单元具有以下优点:能够在要研究的轴的区域中在没有特别的机械准备的情况下以特别高的可靠性和准确度获取转速和/或旋转角度并且因此获取所基于的(zu Grunde liegende)轴的取向。根据本发明,这借助独立权利要求1的特征实现,其方式是,实现一种转速和/或旋转角度感测单元,用于感测可以借助肌力和/或马达力驱动的工作设备和尤其是车辆的轴和尤其是曲轴的围绕曲轴的旋转轴线的转速和/或旋转角度,具有:(i)表面结构,所述表面结构在材料方面和/或磁性地构造在曲轴的表面上,和(ii)传感器单元,所述传感器单元构造成用于感测由轴和由表面结构承载的磁场。通过根据本发明的措施能够在没有机械量取并且没有机械耦合的情况下通过在轴上或中的磁性信号的感测并且因此无磨损地和以更高的准确性地感测所基于的轴的转速和/或旋转角度和所述轴的旋转轴线或转动轴线。
通过根据本发明的措施并且尤其通过轴关于旋转轴线的转速和旋转角度和由此与时间有关的位置的无接触的感测,在测量值感测时得出特别高度的无干扰性。在此,尤其以有利的方式利用由轴承载的和/或输出的磁场通过表面结构的调制,该表面结构机械地和/或磁性地构造和布置。
从属权利要求示出本发明的优选扩展方案。
根据本发明的转速和/或旋转角度感测单元的有利扩展方案,当表面结构构造为编码时(尤其针对曲轴的围绕旋转轴线的角度位置)得出在确定轴的转速和/或旋转角度时特别高的可靠性。以该方式,可以在任意时间点获取轴关于所述轴的旋转轴线的取向并且由取向的时间相关性也确定轴的转速。
原则上,提供用于构型所基于的轴的表面上的表面结构的不同可能性。在此,原则上可以单独地或者以相互组合的方式使用以下所有的措施,所述措施可以用于轴关于旋转轴线的位置的沿轴的周向方向的角度分辨的辨别(Diskriminierung)。
在根据本发明的转速和/或旋转角度感测单元的特别简单的构型中,表面结构构造为(i)具有一系列的凸起部、凹陷部和/或槽口的机械结构,(ii)具有一系列一个或多个斜坡的机械结构,所述斜坡分别具有在斜坡的端部处的棱边,和/或(iii)分别在轴的周向方向上的在轴的表面上或中的滚花。
对此替代地,永磁编码能够以施加在表面上或者引入到表面中的方式存在。这例如在局部永磁区域方面是可能的。
磁性的和机械的结构化可以相互组合。
所述编码可以通过在轴的表面中和沿周向方向的机械的和/或磁性的区域的相应的不同长度或角度延展记录。
根据本发明的转速和/或旋转角度感测单元的另外的实施例,为了提升敏感性并且由此提升测量精度而设置为,传感器单元具有至少一个接收线圈和/或芯,所述芯尤其具有铁磁材料或者由铁磁材料制成,其中,相应的接收线圈构造为测量和/或传感线圈。
虽然原则上可以考虑与传感器单元相关的本身存在于轴中的磁场来感测轴的旋转角度和/或转速,但根据本发明的转速和/或旋转角度感测单元的另外的优选构型方式特别有利的是,该转速和/或旋转角度感测单元设置成用于主动地感测轴的转速和/或旋转角度并且为此尤其设置有励磁器单元,该励磁器单元构造成用于使轴加载以尤其随时间变化的磁场。
在上下文中特别有利的是,励磁器单元具有励磁器,所述励磁器尤其由磁性线圈组成或具有磁性线圈、具有芯和/或具有铁磁材料或者由铁磁材料制成。
在此,可以考虑励磁器单元的不同布置。除了本身励磁器单元的明确设置之外也可以使用以下装置,所述装置与另外的设施相关地构造并且用于将磁场施加到待测量的轴上。
在根据本发明的转速和/或旋转角度感测单元的另外的优选实施方式中,励磁器单元构造为在传感器单元外部的单元和/或构造为转矩感测装置的励磁器单元。
在该实施方式中特别有利的是,在基于磁场工作并且构造成用于将磁场主动施加给轴的转矩感测装置中,在那里必须已经存在的励磁器单元在确定转速和旋转角度方面也可以用于产生磁场。由此节省费用,减小所需构件的数量并且形成用于原本的转速和/或旋转角度感测单元的更紧凑的结构形式。
在根据本发明的转速和/或旋转角度感测单元的构型中,当传感器单元、尤其是传感器单元的相应接收线圈和/或相应的励磁器、尤其是励磁器单元或励磁器的相应磁性线圈至少部分地构造为一个电路板或印刷电路板或者多个电路板或印刷电路板的结构时,能够实现特别高的紧凑性。
为了真正确定用于所基于的轴的转速和/或旋转角度的值,在根据本发明的转速和/或旋转角度感测单元的优选构型方式中,构造有分析和控制单元,所述分析和控制单元设置成,(i)接收由传感器单元输出的代表所感测的磁场的值,并且(ii)基于所接收的值确定轴的转速和/或旋转角度的值。
此外,本发明在应用方面也涉及一种工作设备,尤其是可以通过肌力和/或或马达力驱动的车辆、尤其是自行车、电动自行车、电动单车、电动脚踏车或类似物,具有至少一个轮、用于驱动所述至少一个轮的驱动装置和根据本发明构型的转速和/或旋转角度感测单元以用于感测驱动装置的轴的转速和/或旋转角度,在所述转速和/或旋转角度感测单元中可以基于所感测的转速和/或所感测的旋转角度监测和/或控制驱动装置。
附图说明
参照附图详细描述本发明的实施方式。
图1至3以不同侧的示意性视图示出根据本发明的转速和/或旋转角度感测单元的实施方式,
图4和5以示意性形式示出根据本发明的转速和/或旋转角度感测单元的另外的实施方式的两个视图,更确切地说所述转速和/或旋转角度感测单元与设置的转矩感测装置共同作用,
图6至8示出轴的表面上或中的表面结构的实施方式的角度的不同视图,所述实施方式可以基于根据本发明的用于转速和旋转角度的探测原则,
图9以立体视图示出根据本发明的、与转矩感测装置共同作用的转速和/或旋转角度感测单元的实施方式,和
图10以示意性侧视图示出在使用根据本发明的转速和/或旋转角度感测单元的实施方式的情况下尤其按照电动自行车的方式的车辆的根据本发明的工作设备的实施方式。
具体实施方式
下面参照图1至10详细描述本发明的实施例。相同的和等效的以及相同或等效起作用的元件和部件标有相同的附图标记。并不在所述元件出现的每种情况中复述标出的元件和部件的详细描述。
所示出的特征和另外的特性能够以任意的方式彼此孤立并且任意地相互组合,而不偏离本发明的核心。
首先参照图10示例性地将电动自行车详细描述为根据本发明的工作设备和尤其根据本发明的车辆1的优选实施方式。
车辆1作为电动自行车包括框架12,在所述框架上布置有前轮9-1、后轮9-2和具有两个曲柄7、8的曲柄传动装置2,所述曲柄具有踏板7-1和8-1。电驱动装置3集成在曲柄传动装置2中。在后轮9-2上布置有小齿轮6。
通过骑行者和/或通过电驱动装置3提供的驱动力矩由在曲柄传动装置2处的牙盘4通过链5传递到小齿轮6上。
在车辆1的把手上海布置有控制单元10,该控制单元与电驱动装置3连接。在框架12中或上还构造有电池11,所述电池用于电驱动装置3的电流供应。
在框架12中还集成有曲柄轴承13或脚踏轴承,所述曲柄轴承或脚踏轴承具有曲柄壳体14和曲轴15。
根据本发明的车辆1的驱动装置80总体上包括用于通过骑行者借助于肌力操作的曲柄传动装置2和附加的或替代的电驱动装置3。
在驱动装置80的区域中也构造有根据本发明的转速和/或旋转角度感测单元100的实施方式,以便探测曲轴15的转速和/或旋转角度。
参照在图10中示出的三角(Dreibein)清楚的是,车辆以其平行于y方向的纵向延伸方向Y延伸,而横向延伸方向平行于x方向走向并且与曲轴15的轴线X的方向一致。
图1至3示出根据本发明的转速和/或旋转角度感测单元100的实施方式的不同视图。
转速和/或旋转角度感测单元100的基础结构最好可以由根据图1的俯视图看出。在那里曲轴15作为可施加以转矩的轴示出,所述轴适用于在转速和/或旋转角度方面被监测。曲轴15在x方向上定向并且围绕平行于x方向定向的轴线X可旋转地支承,这也结合用于根据本发明的车辆1的图10示出。
在图1中示出的根据本发明的转速和/或旋转角度感测单元100的实施方式由传感器单元30和励磁器单元20组成。
传感器单元30用作为测量传感器装置或者简称为测量传感器并且具有接收线圈31-1,该接收线圈围绕或者包围芯31-2,所述芯例如具有铁磁材料或者由铁磁材料制成。
励磁器单元20的励磁器21与接收线圈31-1组合,所述励磁器作为励磁器单元20的一部分呈具有芯21-2的磁性线圈21-1的形式。
由图2和3的示图得出,传感器单元30的接收线圈31-1和励磁器单元20的磁性线圈21-1同轴地并且彼此叠合地构造,在空间上直接相邻并且彼此电解耦,并且具有共同的芯31-2、21-2,所述芯例如具有铁磁材料或者由铁磁材料制成。
传感器单元30和励磁器单元20这样布置和定向,使得在投影中线圈31-1、21-1的轴线和共同的芯的轴线30-2、41-2位于旋转轴线X的投影上。以该方式,特别准确地感测由轴15通过借助于励磁器单元20的励磁所激励和承载的磁场。
图2和3示出图1中的根据本发明的转速和/或旋转角度感测单元100的组件的沿着剖平面II-II或III-III剖开的侧视图。
由这些示图清楚的是,传感器单元30的接收线圈31-1和励磁器单元20的磁性线圈21-1彼此相对应,具有共同的芯21-2、31-2,并且励磁器单元20的励磁器21的磁性线圈21-2直接布置在作为测量传感器起作用的传感器单元30的相对应的接收线圈31-1上方。
在接收线圈31-1的背离励磁器单元20的励磁器21的磁性线圈21-2的一侧上与所述接收线圈直接相邻并且在空间上间隔开地布置有轴15,所述轴具有表面15a。在此,相对于表面15a的空间距离这样选择,使得能够特别准确地探测由励磁器单元20在轴15中激励的并且由轴15承载的磁场。
为了探测转速和/或旋转角度,需要由轴15承载的并且在传感器单元20的位置处起作用的磁场的调制。根据本发明,这通过以下方式实现,在轴15的表面15a上在以下区域中构造表面结构40,所述区域在轴15旋转时出现在传感器单元20和尤其接收线圈21-1的附近。
在图1至3中示出的实施方式中,表面结构40由凸起部42和凹陷部43的交替次序、即按照在轴15的表面15a上沿周向方向环绕的滚花
以该方式,传感器单元30以特别高的敏感性测量由轴15承载的磁场。
图4和5以示意性方式示出根据本发明的转速和/或旋转角度感测单元100的另外的实施方式的两个视图,更确切地说,所述转速和/或旋转角度感测单元与设置的转矩感测装置110共同作用。
图4和5的实施方式的核心方面在于,针对转矩感测装置110的工作原理所需的励磁器单元120,同时作为用于根据本发明的转速和/或旋转角度感测单元100的励磁器单元20使用,也作为关于传感器单元30和所述传感器单元的接收线圈31-1在外部构造的励磁器单元20使用。在此,在这里示出的旋转角度感测单元110的实施方式中基于下列核心方面:
在图4和5中示出的根据本发明的转速和/或旋转角度感测单元100与转矩感测装置110的实施方式中,转矩感测装置100由第一传感器单元130和第二传感器单元140组成。
第一传感器单元130用作为测量传感器装置或者简称为测量传感器并且具有四个接收线圈131,所述接收线圈例如可以布置在垂直的、平面的并且设有相同长度侧边的十字形的端点上。具有作为励磁器单元120的一部分的磁性线圈121与芯122的励磁器单元120位于十字形的中心、即交叉点处。
作为测量传感器装置的第一传感器单元130通过其定向十字这样取向,使得旋转轴线X在投影中与第一传感器单元130的定向十字的侧边围成45度的角度。以该方式,可以特别准确地感测由轴15通过借助于励磁器单元120的励磁所激励和承载的磁场。
如在图4和5的实施方式中示出的那样,除了第一传感器单元130之外附加地构造有与第一传感器单元130构造相同的第二传感器单元140,但该第二传感器单元具有与第一传感器单元130叠合的另外的电连接布线(elektrische Verschaltung)并且在空间上位于该第一传感器单元的稍上方。
在上下文中,叠合意味着转矩感测装置110的两个传感器单元130、140具有相同数量的、例如四个接收线圈131或141,所述接收线圈以1对1对应的方向彼此相对应,其中,彼此对应的接收线圈131和141(如在该实施方式中示出的那样)可以共轴地并且彼此直接空间相邻地布置,使得各个十字的端点、侧边和交叉点重合,其中,交叉点在投影中彼此重叠并且位于旋转轴线X或所述旋转轴线的投影上。
图4和5中的第一传感器单元130和第二传感器单元140关于彼此并且关于轴15相同取向地布置,但关于其接收线圈131、141以不同的方式电连接。
转矩感测装置110的两个传感器单元130和140在运行中由具有呈磁性线圈121的形式的励磁器和由磁性线圈121包围的芯122的共同的励磁器单元120激励(也通过由曲轴15辐射的场获得)。具有磁性线圈121的励磁器布置在交叉点处、交叉点中或交叉点的区域中,使得总体上得出转矩感测装置110的励磁器单元120和传感器单元130、140的对称布置。
由图4和5的示图清楚的是,彼此相对应的接收线圈131、141相应地、即成对地具有共同的芯132、142,并且转矩感测装置110的作为补偿传感器起作用的第二传感器单元140的各个接收线圈141总是直接布置在转矩感测装置110的作为测量传感器起作用的第一传感器单元130的相对应的接收线圈131上方。
以该方式,转矩感测装置110的第一传感器单元130以特别高的敏感性在包括干扰信号在内的情况下测量由轴15承载的磁场,而转矩感测装置110的第二传感器单元140以相同的方式接收这些组合的信号,但基于不同的电节省电路(Sparschaltung)补偿干扰信号分量。
附加地,该作用方式能够特别有利地使通过转矩感测装置110的第一传感器单元和第二传感器单元130和140输出的信号相减,必要时以加权和/或修正(nachbearbeitet)的方式,以便由此过滤出干扰影响并且能够特别准确地探测通过加载的转矩产生的作用到承载的磁场上的效应,更确切地说具有以下目的:在起作用的转矩的值方面尽可能准确地和无干扰地确定所述转矩。
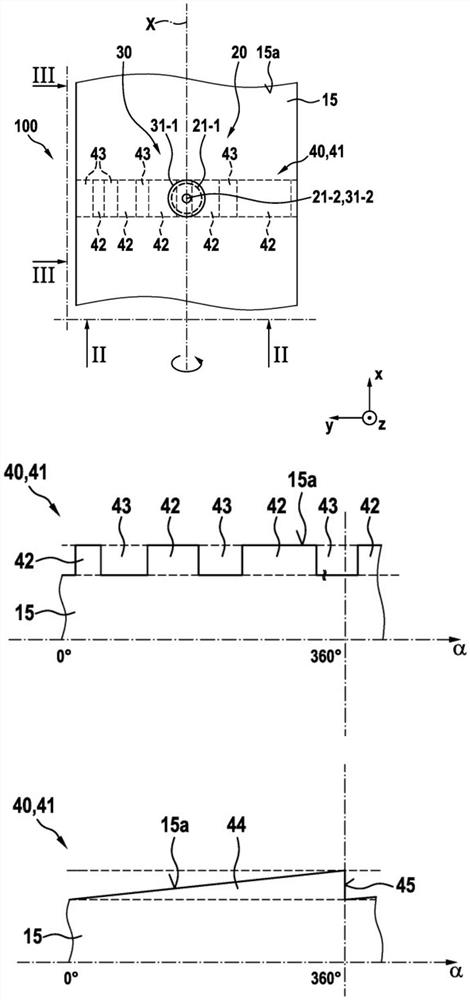
图6至8示出在轴15的表面15a上或中的表面结构40的实施方式的不同视图,所述实施方式可以基于根据本发明的用于转速和旋转角度的探测原则。
在此,示图这样选择,使得在表面15a上的相应表面结构40分别相应于在0°至360°之间的弯曲的圆周角或展开角度α以弯曲的形式、即平坦地(planar)显示出。
在根据图7的实施方式中,表面结构40按照具有凸起部42和凹陷部或槽口43的滚花的方式构造在轴15的表面15a中。在此,凸起部42和/或凹陷部/槽口43的长度可以不同地选择,以便提供在表面15a上的位置的编码并且由此提供关于圆周角或展开角度α的角度编码。
在根据图8的实施方式中,表面结构40的滚花41由具有端侧或棱边45的线性斜坡44组成。通过这种斜坡44可以通过斜坡高度作为角度α的函数来编码后者。
图9以立体视图示出根据本发明的转速和/或旋转角度感测单元100的实施方式,更确切地说,所述转速和/或旋转角度感测单元又与转矩感测装置110共同作用,所述转矩感测装置使励磁器单元20、120销接(stiften)。
由图9的示图尤其可得出,根据本发明的转速和/或旋转角度感测单元100与使励磁器单元20、120销接的、具有第一和第二传感器单元130、140的转矩感测装置110安装在共同的空间区域中并且尤其安装在共同的屏蔽壳体60中并且在那里磁性地作用到曲轴15的表面15a上,以便以该方式一方面感测转速和旋转角度并且另一方面感测作用到轴15上的转矩。
本发明的这些和另外的特征和特性参照下面的说明进一步阐释:
本发明的一方面在于用于在固定的或旋转的轴上的转速和/或旋转角度感测的主动传感器的发展。对于这种旋转轴的示例是自行车、电动自行车、电动单车、电动脚踏车或类似物的曲轴。
通过本发明尤其应实现在相对于轴的旋转的例如由于轴15的不理想的几何形状、振动、机械和/或温度变化和类似因素的易受干扰性方面的改善。
本发明的核心思想是表面结构40的设置,所述表面结构构造在基础的轴15的表面15a上或中并且用于调制由轴15固有地或主动地产生的承载磁场,使得由此实现一种用于旋转角度和/或转速的编码。
实现在低工作频率时的主动磁性测量,尤其在小于5kHz的范围中、优选在小于3kHz的范围中。
模拟的和/或数字的信号处理用于更好的信号分辨和信噪比的提高。在那里也能够附加地实现温度补偿。
在本发明的实施方式中,所基于的励磁器单元20可以由共同作用的转矩感测装置110的励磁器单元120形成,所述转矩感测装置尤其可以构造有叠合的第一传感器单元和第二传感器单元130或140。
在上下文中,第一传感器单元和第二传感器单元130和140也可以理解为两个独立的传感器头,一个用于探测并且一个用于补偿。
结合附图已经示出在面向轴15的一侧上的具有不同几何结构的线圈芯121-2、131-2和141-2。该侧可以作为端面平坦地、凸形地、圆形地、锥状地适配和/或局部地适配于轴15的表面形状,即例如按照圆柱的内周面的区段或片段的类型凹形地并且与轴15的外周面一致地适配。
在转矩感测装置110的优选实施方式中可以设置有:
-居中的励磁线圈21、121,
-四个用于第一传感器单元130的传感线圈131,所述传感线圈在投影中相对于轴心线X以45°的角度旋转或偏转地布置,
-用于第一传感器单元130的按照惠斯通桥的类型连接的电连接布线,以及
-四个呈用于第二传感器单元140的接收线圈141的形式的电磁补偿线圈,所述补偿线圈以特定的串联连接在空间上布置在传感线圈131上方并且分别布置在与传感线圈131同属的芯132上方。
-芯可以构造有铁磁材料或者由铁磁材料构造,所述芯使所有线圈131和/或141相互连接。
-传感线圈131感测转矩和干扰的信号。
-基于补偿线圈的按照串联连接的特定连接布线,所述补偿线圈感测干扰。
-通过在传感线圈131和补偿线圈141之间的磁性耦合实现在“磁性层级”上的干扰补偿,即通过彼此相对应的线圈131、141的互感和/或通过磁性作用(vermittelnd)并且耦合的共同的芯132、142实现。
-根据本发明的转速和/或旋转角度感测单元100的传感器单元30的单独的转速线圈、即接收线圈31-1可以在转速感测装置110的励磁器单元120的励磁线圈121的旁边也与自身的、单独的、分开的和直接属于转速和/或旋转角度感测单元100的励磁线圈21-1沿轴向方向取向地构造。
-这些转速线圈31-1借助于在轴15上的、例如呈编码的滚花41形式的编码表面15a测量磁场的波动,所述滚花施加到轴15的表面15a上或者引入到表面15a中。
-可以进一步优化结构的微型化,使得用于感测干扰量所需的面积需求与用于探测转矩所需的相同面积一致。
-此外,通过将转矩感测装置100的补偿线圈141和传感线圈131聚集在共同的芯132、142上将芯的数量从9减小为5。这也节省了面积、材料和费用。
-由此传感器的总尺寸明显变小并且传感器可以容易地无问题地集成在任意类型的小的环境中。
-全部的电子部件大约需要与传感线圈和补偿线圈131、141相同的面积。因此不产生附加的面积需求。
-因为整个传感器能够以最新式的电路板技术构造,所以实现精度和由此小的制造公差位于借助该制造技术的电路板或印刷电路板的制造公差的范围中,即在μm的范围中。这使得在批量生产中的使用具有吸引力。
-可选地,屏蔽板60可以用于减小电磁兼容性干扰。
- 转速和/或旋转角度感测单元和工作设备
- 感测单元和包括感测单元的显示设备