一种基于神经网络预测的线性自抗扰控制器的设计方法
文献发布时间:2023-06-19 12:14:58
技术领域
本发明属于自动控制领域,具体涉及一种基于神经网络预测的线性自抗扰控制器的设计方法。
背景技术
自抗扰控制技术(Active disturbance rejection control,ADRC)将系统未建模动态和未知干扰作为总扰动,通过扩张状态观测器进行估计并在反馈控制中进行消除。ADRC不依赖系统模型,鲁棒性强,适用于复杂的现场控制环境,并且能够相对容易地在组态中进行搭建,已经得到了广泛的工业应用。在复杂工业环境中,普遍存在着大惯性、大迟延的控制对象,经典的自抗扰技术难以直接处理大迟延,因此经典自抗扰技术在大迟延系统中应用面临调节效果不佳的情况。
现有中国专利申请号为201410495004.1,公开了一种时滞系统的自抗扰控制系统的设计及整定方法。该方法基于自抗扰技术,首先将复杂的被控对象拟合成一阶惯性环节加纯时滞数学模型,同时将时滞归结为扰动量,应用时滞降价线性扩张状态观测器对含有时滞的未知总扰动进行估计,并主动补偿总扰动对系统的影响,从而把时滞系统还原为ADRC标准的“积分器串联型”,实现时滞系统的补偿。最后推导了系统的闭环传递函数,消除了特征方程中的纯时滞环节,相应给出了具有普适性的ADRC单参数整定公式及可调参数之间的数值关系。仿真结果验证了所设计的实用ADRC具有较好的稳定性、快速性、准确性和抗扰性。
又有人提出了一种线性自抗扰控制器的另一种改进型,它是基于普通线性自抗扰控制器结构的基础上,在反馈回路利用高阶惯性环节代替纯迟延实现了对迟延时间的补偿。
以上两种控制器均是利用被控对象的部分信息,能够在一定程度上改善大迟延对象的控制效果,但实际工程对象在复杂环境中往往面临多种外界干扰,出现特性变化的现象,尤其是时滞系统往往体现出时变的现象,迟延特性容易出现波动和变化,现有被控对象受到外界扰动的影响,导致现有的改进型自抗扰控制器在实际工程中出现调节效果变差甚至不稳定的情况,自抗扰控制难以取得满意的控制效果。
发明内容
针对现有技术的不足,本发明的目的在于提供一种基于神经网络预测的线性自抗扰控制器的设计方法。
本发明所述的线性自抗扰控制器的设计方法包括:
步骤1、获取和预处理样本数据,构建样本训练集和样本测试集;
步骤2、利用样本训练集构造ELMAN神经网络预测模型,并用样本测试集进行验证;
步骤3、输入工况数据到ELMAN神经网络预测模型获取输出值改造扩张状态观测器。
进一步的,步骤1所述获取和预处理样本数据,构建样本训练集和样本测试集包括:
步骤101、将采集到的历史样本数据划分为训练样本和测试样本,训练样本和测试样本均包括不同工况下被控制对象干扰因素、被控制对象控制量和控制对象输出值;
步骤102、将训练样本和测试样本分别代入控制对象模型计算训练样本延迟时间和测试样本延迟时间,分别定义为有标签数据和无标签数据;
步骤103、根据额定工况条件下的被控制对象干扰因素、被控制对象控制量和控制对象输出值代入控制对象模型,计算获取额定工况延迟时间;
步骤104、根据标签输出值计算模型,利用额定工况延迟时间和有标签数据计算有标签输出向量;利用额定工况时间和无标签数据计算无标签输出向量,作为检验构建模型是否满足预先设定的要求。
进一步的,步骤103所述控制对象模型如下式计算:
上式(1)中,y为控制对象输出值,d为被控对象干扰因素,s为拉普拉斯算子,K为过程的静态增益,u为控制对象输入值,τ为被控对象的迟延时间,T为过程的惯性时间。
进一步的,步骤104所述标签输出值计算模型如下式:
f(d,u)
上式(2)中,f(d,u)
进一步的,步骤2所述利用样本训练集构造ELMAN神经网络预测模型,并用样本测试集进行性验证包括:
步骤201、构建训练数据集X=(u
步骤202、将训练数据集X=(u
步骤203、模型检验,构建测试数据集X'=(u
步骤204、将预测输出向量y'
进一步的,步骤3所述ELMAN神经网络预测分析模型如下式计算:
上式(3)中,W
进一步的,步骤3所述ELMAN神经网络预测分析模型检验按照下式(4)计算:
上式(4)中,ε为预先设置的数值。
进一步的,步骤3所述输入工况数据到ELMAN神经网络预测模型获取输出值改造扩张状态观测器包括:
步骤301、获取当前状态下的控制对象干扰因素和控制对象输入值;
步骤302、将当前状态下的控制对象干扰因素和控制对象输入值代入ELMAN神经网络预测分析模型,求解当前工况的迟延时间估计值;
步骤303、将当前工况的迟延时间估计值输入扩张状态观测器进行改造,改造后为下式(5):
上式(5)中,L
本发明的有益效果是:
本发明提出了一种基于神经网络预测的改进型自抗扰控制器的设计方法,该方法提出的控制器利用神经网络能够实现对多干扰下的复杂对象迟延特性的预测功能,进而实现对多干扰下大迟延对象的精准控制。
附图说明
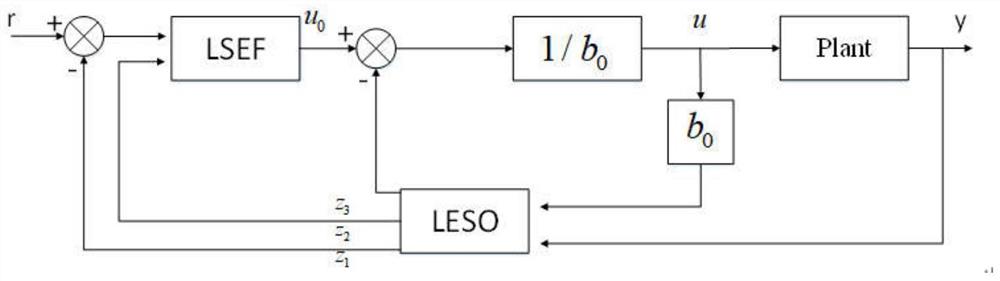
图1为本发明所述控制器结构示意图;
图2为本发明所述具体流程示意图。
具体实施方式
下面结合说明书附图对本发明做进一步说明。
本发明提出了一种基于神经网络预测的改进型自抗扰控制器的设计方法。
如图1、图2所示,所述线性自抗扰控制器的设计方法,包括:
步骤1、获取和预处理样本数据,构建样本训练集和样本测试集;
步骤2、利用样本训练集构造ELMAN神经网络预测模型,并用样本测试集进行验证;
步骤3、输入工况数据到ELMAN神经网络预测模型获取输出值改造扩张状态观测器,构建ANN-LADRC。
进一步的,步骤1所述获取和预处理样本数据,构建样本训练集和样本测试集包括:
步骤101、将采集到的历史样本数据划分为训练样本和测试样本,训练样本和测试样本均包括不同工况下被控制对象干扰因素、被控制对象控制量和控制对象输出值;
步骤102、将训练样本和测试样本分别代入控制对象模型计算训练样本延迟时间和测试样本延迟时间,分别定义为有标签数据和无标签数据;
步骤103、根据额定工况条件下的被控制对象干扰因素、被控制对象控制量和控制对象输出值代入控制对象模型,计算获取额定工况延迟时间;
步骤104、根据标签输出值计算模型,利用额定工况延迟时间和有标签数据计算有标签输出向量;利用额定工况时间和无标签数据计算无标签输出向量,作为检验构建模型是否满足预先设定的要求。
进一步的,步骤103所述控制对象模型如下式计算:
上式(1)中,y为控制对象输出值,d为被控对象干扰因素,s为拉普拉斯算子,K为过程的静态增益,u为控制对象输入值,τ为被控对象的迟延时间,T为过程的惯性时间。
进一步的,步骤104所述标签输出值计算模型如下式:
f(d,u)
上式(2)中,f(d,u)
进一步的,步骤2所述利用样本训练集构造ELMAN神经网络预测模型,并用样本测试集进行性验证包括:
步骤201、构建训练数据集X=(u
步骤202、将训练数据集X=(u
步骤203、模型检验,构建测试数据集X'=(u
步骤204、将预测输出向量y'
进一步的,步骤3所述ELMAN神经网络预测分析模型如下式计算:
上式(3)中,W
进一步的,步骤3所述ELMAN神经网络预测分析模型检验按照下式(4)计算:
上式(4)中,ε为预先设置的数值。
进一步的,步骤3所述输入工况数据到ELMAN神经网络预测模型获取输出值改造扩张状态观测器包括:
步骤301、获取当前状态下的控制对象干扰因素和控制对象输入值;
步骤302、将当前状态下的控制对象干扰因素和控制对象输入值代入ELMAN神经网络预测分析模型,求解当前工况的迟延时间估计值;
步骤303、将当前工况的迟延时间估计值输入扩张状态观测器进行改造,改造后为下式(5):
上式(5)中,L
z(t)为扩张状态观测器中的状态变量,
具体的步骤3为,假设过程对象的模型为:
其中,y为系统输出;u为系统输入;w为系统外部扰动;
将g扩展为一个新状态,令x
假设g可微且
其中,
C
结合ELMAN神经网络模型的输出,将LSEO设计为
其中,L
基于LESO对系统状态及扰动的估计,系统控制率可设计为:
其中状态反馈控制率u
则可得:
其中,r(t)——需跟踪的输入信号,
控制器中的剩余未知参数为b
本发明并不限于上述实施方式,在不背离本发明实质内容的情况下,本领域技术人员可以想到的任何变形、改进、替换均落入本发明的保护范围。
- 一种基于神经网络预测的线性自抗扰控制器的设计方法
- 基于预测跟踪微分器的线性自抗扰控制器的设计方法