用于使物体成像的光学系统以及用于操作光学系统的方法
文献发布时间:2023-06-19 12:16:29
本发明涉及一种用于使物体成像的光学系统,其中该光学系统具有物镜、像稳定单元和像平面。在本发明的一个实施方式中,该光学系统例如设置有目镜。此外,本发明涉及一种用于操作该光学系统的方法。
上述光学系统例如用在单筒望远镜或双筒望远镜中。观察者通过单筒望远镜或双筒望远镜获取的像通常是被模糊地感知的,因为使用者的手的抖动或转动还有地面的运动进而导致光学系统的运动。手抖动的典型频率在0Hz至20Hz的范围内。转动的典型幅度在0°至8°的范围内。为了解决模糊的问题,已知在光学系统中稳定像。已知的解决方案使用像稳定装置以便借助于机械装置和/或电子装置来稳定像。
从DE 23 53 101 C3已知一种呈单筒望远镜形式的光学系统,该光学系统具有物镜、呈棱镜转像系统的像稳定单元以及目镜。棱镜转像系统以万向接头方式支撑在单筒望远镜的壳体中。这应理解为,棱镜转像系统以如下方式布置在单筒望远镜的壳体中,使得棱镜转像系统围绕两条彼此直角布置的轴线可旋转地支撑。为了可旋转的支撑,一般使用被称为万向接头的设备。以万向接头方式支撑在壳体中的棱镜转像系统的铰接点布置在物镜的像侧主平面与目镜的物侧主平面之间的中部。以万向接头方式支撑的棱镜转像系统由于其惯性而不被所出现的旋转抖动。因此它在空间中保持固定。以此方式补偿了由于壳体的旋转抖动产生的像模糊化。但是,在这种纯机械的像稳定装置中可能出现的是,无法对所有相关频率和/或幅度的抖动进行稳定化。换言之,完全可能出现的是,在一些特定的抖动或转动时没有进行稳定化。
从DE 39 33 255 C2中已知一种具有像稳定作用的双筒望远镜,该双筒望远镜具有棱镜转像系统。该棱镜转像系统具有分别具有翻转轴线的波罗(Porro)棱镜。这些波罗棱镜可以被形成为可围绕其相应的翻转轴线枢转。为了使波罗棱镜枢转,设置有电机。取决于造成像模糊的抖动来进行枢转。
从DE 20 2018 106 070 U1已知一种用于在单筒望远镜中进行水平和竖直的像稳定化的设备。该设备具有布置在物镜与目镜之间的转像系统。该转像系统由在成像射束路径中倾斜的平面镜和屋脊棱镜组成。该平面镜以既可以围绕纵轴也可以围绕横轴旋转的方式支撑,其中纵轴与横轴的交点和物镜的光轴在平面镜上的命中点重合。
从US 5,910,859已知另一种具有像稳定单元的光学系统。这种光学系统的像稳定单元以转像系统的形式形成,该转像系统被布置在物镜与目镜之间中部的光学中性点中。光学中性点理解为如下点:物镜和目镜可以围绕该点在空间中相对旋转,而物体的像的位置不偏移,其中转像系统在空间中保持固定。转像系统围绕光学中性点以及围绕两条轴线(这两条轴线垂直于光轴布置)可运动地布置。如果现在即使在抖动时转像系统也在空间中被稳定固持,则在观察物体时物体的像也借助于这种已知的光学系统被稳定。光学中性点还可以被如下描述。光学中性点理解为在物镜与目镜之间的光轴上的点,像稳定单元可围绕该点旋转地布置,使得在围绕任意点的旋转抖动的情况下,通过物镜和目镜被观察的物体的像的方向与像稳定单元一样在空间中保持固定。
观察已经得出,为了不使光束出现晕影,在US 5,910,859中建议的转像系统的位置造成了相对较大的转像系统。因此布置有转像系统的壳体同样相当大。该壳体具有箱子的形状。许多用户认为从呈砖块形状的这种设备得出的美学印象并不十分美观。此外,相对较大的转像系统的结果是转像系统的惯性矩相当大。因此需要相对较大的力来移动转像系统。为了提供这些相对较大的力,一般使用大功率电机,电机自身需要较大的构造空间。此类电机还具有较大的能耗,这导致一般用于为电机供能的电池的寿命缩短。
此外,在由现有技术中已知的双筒望远镜中已知,单一的像稳定单元同时用于第一镜筒中的第一光学子系统以及第二镜筒中的第二光学子系统。构造原因导致这个单一的像稳定单元至少与第一镜筒距第二镜筒的距离一样宽。此外,这个单一的像稳定单元具有较大重量。当现在使用电机来调整单一的像稳定单元时,电机必须进而是大功率的,这进而导致已经阐释的问题。
本发明的基本目的在于,给出一种用于使物体成像的光学系统,该光学系统具有惯性矩相对较小的像稳定单元,使得与现有技术相比可以使用更小的力来调整像稳定单元并且可以将更小的壳体用于该光学系统。此外,应给出一种用于操作该光学系统的方法。
根据本发明,该目的通过具有权利要求1特征的光学系统实现。本发明的方法通过权利要求32的特征给出。本发明的其他特征由以下的说明书、以下的权利要求书和/或附图得出。
本发明的用于使物体成像的光学系统具有:至少一个物镜、例如第一物镜,至少一个像稳定单元、例如第一像稳定单元,以及至少一个像平面、例如第一像平面。从物镜向像平面的方向上看,沿着光学系统的光轴例如第一光轴首先布置物镜、然后布置像稳定单元并且然后布置像平面。换言之,像稳定单元被布置在物镜与像平面之间。在一个实施方式中提出,该物镜被形成为用于聚焦,并且该物镜的至少一个单元例如沿着光轴被移位以便聚焦。在另一个实施方式中提出,该物镜具有至少一个正面单元、例如第一正面单元和至少一个聚焦单元、例如第一聚焦单元,其中该聚焦单元沿着光轴被移位以便聚焦。再次替代性地提出,该聚焦通过目镜、例如第一目镜来进行,该目镜例如被设置在该光学系统处并且在下文中仍将详细说明。
本发明的光学系统被形成为例如单目镜、单筒望远镜、双筒望远镜、天文望远镜和/或观靶镜。
该像稳定单元具有至少一个第一光学单元和至少一个第二光学单元。该像稳定单元的第一光学单元例如被布置在该物镜与该像稳定单元的第二光学单元之间。此外,该像稳定单元的第一光学单元被形成为可以围绕第一旋转轴线旋转。所提出的是,第一旋转轴线为该像稳定单元的第一光学单元围绕其旋转的唯一旋转轴线。然后在这个实施方式中提出,第一光学单元不围绕其他旋转轴线旋转。该像稳定单元的第二光学单元被形成为可以围绕第二旋转轴线旋转。尤其提出,第二旋转轴线为该像稳定单元的第二光学单元围绕其旋转的唯一轴线。然后在这个实施方式中提出,第二光学单元不围绕除第二旋转轴线之外的其他旋转轴线旋转。例如在本发明的一个实施方式中提出,第一旋转轴线和第二旋转轴线为不同的轴线。换言之,第一旋转轴线和第二旋转轴线是不平行的。因为在这个实施方式中第一旋转轴线和第二旋转轴线是不同的轴线,在这个实施方式中,该像稳定单元的第一光学单元围绕第一旋转轴线的旋转以及该像稳定单元的第二光学单元围绕第二旋转轴线的旋转可以彼此独立地进行。换言之,该像稳定单元的第一光学单元围绕第一旋转轴线的旋转不一定造成该像稳定单元的第二光学单元围绕第二旋转轴线的旋转。反而,该像稳定单元的第一光学单元围绕第一旋转轴线的旋转可以任选地实现该像稳定单元的第二光学单元围绕第二旋转轴线的旋转。
此外,在本发明的光学系统中提出,该像稳定单元的第二光学单元为光学屋脊单元,例如第一光学屋脊单元。该像稳定单元的第二光学单元例如被形成为第一反射镜系统和/或第一屋脊棱镜。换言之,该像稳定单元的第二光学单元可以被形成为直视型光学单元或者被形成为仅具有较小的射束偏置。在作为第一屋脊棱镜的形成方式方面还参考再下文的实施方案。
本发明具有的优点是,第一光学单元和第二光学单元具有较轻的重量,使得第一光学单元和/或第二光学单元的惯性矩与现有技术相比得以减小。因此,在本发明的光学系统中可以使用具有例如与现有技术相比相对较小的力的电机来调整第一光学单元和/或第二光学单元。这样的电机的独特之处在于它们需要施加比现有技术中更小的功率并且具有更小的耗电量。同时可能的是,可以使用比现有技术中更小的像稳定单元,而不会使本发明光学系统的成像特性变差。由此,对于本发明的光学系统还可以使用比现有技术中更小的壳体,从而产生对于许多用户而言更美观的美学印象。此外,本发明可以实现:可以将用于移动第一光学单元和用于移动第二光学单元的驱动单元布置在壳体中在第一光学单元下方或第二光学单元下方的区域中,使得驱动单元可以整合到现有的构造空间中。
如上文已经说明的,该像稳定单元具有第一光学单元和第二光学单元。通过围绕第一旋转轴线旋转第一光学单元,实现了像在第一方向上的稳定化。通过围绕第二旋转轴线旋转第二光学单元,进行像在第二方向上的稳定化,该第二方向例如被定向为垂直于第一方向。这将在再下文中详细解释。
在本发明的光学系统的一个实施方式中附加地或替代地提出,该像稳定单元的第二光学单元围绕其旋转的第二旋转轴线以10°至89°的角度相对于光轴定向,其中范围边界值同时包括在上述范围内。尤其提出,第二旋转轴线以20°至80°的角度或者30°至70°的角度或者40°至60°的角度相对于光轴定向,其中范围边界值同时包括在上述范围内。在另一个实施方式中例如提出,第二旋转轴线以62.5°的角度相对于光轴定向。已经显示出,第二旋转轴线相对于光轴的上述定向没有造成干扰性像场旋转或仅造成较小的干扰性像场旋转。由此,上述定向特别适合用于稳定像。
在本发明的光学系统的一个实施方式中附加地或替代地提出,本发明的光学系统具有以下特征之一:
-该像稳定单元的第一光学单元被布置在该物镜与该像稳定单元的第二光学单元之间;
-该像稳定单元的第二光学单元被布置在该物镜与该像稳定单元的第一光学单元之间。
在本发明的光学系统的一个实施方式中附加地或替代地提出,该像稳定单元的第一光学单元具有至少一个反射镜、例如第一反射镜,至少一个平面镜、例如第一平面镜,和/或至少一个棱镜、例如第一棱镜。在本发明的光学系统的另一个实施方式中附加地或替代地提出,该像稳定单元的第一光学单元具有单独的如下的面:在该面处,入射到该面上光束被反射。例如提出,该像稳定单元的第一光学单元具有唯一的如下的面:在该面处,入射到该面上光束被反射。
换言之,在这另一个实施方式中提出,在第一光学单元处没有布置其他的反射入射光束的面。
此外,在本发明的光学系统的一个实施方式中附加地或替代地提出,该像稳定单元的第一光学单元被形成为平面镜、例如第一平面镜,其中该平面镜具有镜面、例如第一镜面。平面镜是在光入射侧进行反射的镜子,其反射面是平面式的,即几乎对应于平坦的面。
在本发明的光学系统的一个实施方式中附加地或替代地提出,由第一像稳定单元的第一光学单元以及用于第一光学单元的支架、例如第一支架构成的系统、例如第一系统具有重心、例如第一重心,其中第一旋转轴线穿过该重心延伸。该重心是该系统的质量重心。在另一个实施方式中,附加地或替代地提出,由第一像稳定单元的第二光学单元以及用于第二光学单元的支架构成的系统具有重心,其中第二旋转轴线穿过该重心延伸。该重心是该系统的质量重心。在上述实施方式的情况下有利的是,该像稳定单元基本上平衡地支撑。由此,需要与现有技术相比更小的转矩即可旋转像稳定单元的第一光学单元,使得对用于移动第一光学单元的驱动单元的机械要求较低并且在使用电力运行的驱动单元时与现有技术相比实现了更小的耗电量。
在本发明的光学系统的另一个实施方式中附加地或替代地提出,第一光轴与像稳定单元的第一光学单元的第一反射镜单元在交点、例如第一交点处相交,其中第一旋转轴线穿过该交点延伸。第一光轴的命中点位于第一反射镜单元的平面中心的略微上方。像稳定单元的第一光学单元的反射镜单元可以具有中心点、例如第一中心点,其中第一旋转轴线穿过该中心点延伸。例如当应当用该光学系统实现特别好的成像时,选择最后提及的这两个实施方式。
在本发明的光学系统的仍另一个实施方式中附加地或替代地提出,第一光学单元围绕其旋转的第一旋转轴线与平面相交。例如该平面为第一平面。此外,在这仍另一个实施方式中提出,第二光学单元围绕其旋转的第二旋转轴线位于上述平面中。例如提出,第一旋转轴线沿着坐标系的x轴定向,其中该坐标系由x轴、y轴和z轴给出。x轴、y轴和z轴彼此垂直地定向并且具有呈坐标原点形式的共同的交点。然后第二旋转轴线位于由y轴和z轴扩展成的平面中。这是yz平面。例如在第一光学单元围绕呈x轴形式的第一旋转轴线旋转时,在本发明的光学系统中进行光束的偏转,从而促成像在像平面中沿着y轴的偏移。由此可以抵消用本发明光学系统生成的像沿着y轴的偏移。于是沿着y轴进行稳定化。通过围绕位于上述平面中的第二旋转轴线来旋转第二光学单元,在本发明的光学系统中如下产生光束的偏转,从而促成用本发明光学系统生成的像在本发明光学系统的像平面中沿着x轴的偏移。于是沿着x轴进行像的稳定化。
除了上述有意地将像沿着x轴偏移之外,该像稳定单元的第二光学单元围绕任意轴线、例如在yz平面中的任意轴线的旋转还可能造成用本发明光学系统生成的像的无意旋转。为了避免这种无意的旋转,在本发明光学系统的一个实施方式中附加地或替代地提出,第二旋转轴线对应于轴,其中在第二光学单元围绕这个轴旋转时不造成无意的像旋转。例如,在本发明光学系统的未经稳定化的状态下,第二旋转轴线被定向为垂直于该像稳定单元的第一光学单元的镜面或光入射面。当没有进行像稳定时就存在未经稳定化的状态。在这个实施方式中,仅仅出现了像沿着x轴的偏移。然后没有出现干扰性的像旋转。在本发明的光学系统的另一个实施方式中附加地或替代地提出,在本发明光学系统的未经稳定化的状态下,第二旋转轴线以50°至130°或者60°至120°或者70°至110°或者80°至100°的角度相对于该像稳定单元的第一光学单元的镜面或光入射面定向,其中范围边界值包括在上述范围内。
在本发明的光学系统的另一个实施方式中附加地或替代地提出,该光学系统具有以下特征之一:
-像检测单元、例如第一像检测单元被布置在该像平面中;
-像检测单元、例如第一像检测单元被布置在该像平面中,该像检测单元被形成为像传感器、尤其基于半导体的像传感器;
-该光学系统具有至少一个目镜、例如第一目镜,其中从该目镜向该像平面的方向上看,首先布置该像平面并且然后布置该目镜。由此,上述实施方式从物镜向像平面的方向看具有以下的各单元顺序:物镜-像稳定单元-像平面-目镜。在另一个实施方式中提出,该物镜的像平面和该目镜的像平面重合。
在本发明的光学系统的仍另一个实施方式中附加地或替代地提出,该光学系统具有壳体、例如第一壳体,其中该物镜、该像稳定单元和该像平面被布置在这个壳体中。在本发明的光学系统的另一个实施方式中附加地或替代地提出,该目镜被布置在该壳体中。
在本发明的光学系统的再另一个实施方式中附加地或替代地提出,该像稳定单元被形成为转像系统、例如第一转像系统。尤其提出,该像稳定单元被形成为棱镜转像系统、例如第一棱镜转像系统,或者被形成为透镜转像系统、例如第一透镜转像系统。棱镜转像系统例如具有至少一个棱镜。透镜转像系统例如具有至少一个透镜。
在本发明的光学系统的另一个实施方式中附加地或替代地提出,该光学系统具有以下特征之一:
-用于移动该像稳定单元的第一光学单元和/或第二光学单元的至少一个驱动单元、例如第一驱动单元;
-用于移动该像稳定单元的第一光学单元和/或第二光学单元的至少一个驱动单元、例如第一驱动单元,其中该驱动单元具有至少一个压电陶瓷装置、例如第一压电陶瓷装置;
-用于移动该像稳定单元的第一光学单元和/或第二光学单元的至少一个驱动单元、例如第一驱动单元,其中该驱动单元具有至少一个压电作动器、例如第一压电作动器;
-用于移动该像稳定单元的第一光学单元和/或第二光学单元的至少一个驱动单元、例如第一驱动单元,其中该驱动单元具有至少一个压电弯曲作动器、例如第一压电弯曲作动器;
-用于移动该像稳定单元的第一光学单元和/或第二光学单元的至少一个驱动单元、例如第一驱动单元,其中该驱动单元具有至少一个压电-超声波作动器、例如第一压电-超声波作动器;
-用于移动该像稳定单元的第一光学单元和/或第二光学单元的至少一个驱动单元、例如第一驱动单元,其中该驱动单元具有至少一个压电-行波作动器、例如第一压电-行波作动器;
-用于移动该像稳定单元的第一光学单元和/或第二光学单元的至少一个驱动单元、例如第一驱动单元,其中该驱动单元具有至少一个电机、例如第一电机。例如该电机被形成为直流电机、步进电机或音圈电机;
-用于移动该像稳定单元的第一光学单元和/或第二光学单元的至少一个驱动单元、例如第一驱动单元,以及用于控制/调节该驱动单元的至少一个控制和/或调节单元。
观察已经得出,将上述驱动单元中的至少一个驱动单元形成为基于压电技术的驱动单元是特别有利的。此类驱动单元具有较小的耗电量。此外,此类驱动单元在控制电压关断的情况下具有足够的固持力,从而无须再附加地锁定以可运动方式布置的像稳定单元。当不使用该光学系统时希望将可运动的像稳定单元固定,以便避免损伤像稳定单元和/或以便即使在稳定功能关断的情况下也可以将该光学系统(例如双筒望远镜)用作双筒望远镜。此类驱动单元的另一个优点是,由于直接依赖于所供应的控制电压,此类驱动单元的运动是非常准确的。据此可以准确控制上述可运动的像稳定单元的运动。上述驱动单元提供了相对较小的驱动力,该驱动力对于调整根据现有技术的像稳定单元而言不一定是足够的。
在本发明的光学系统的仍另一个实施方式中附加地或替代地提出,该光学系统具有用于测定该光学系统的运动(例如转动式和/或平动式抖动)的至少一个运动检测器、例如第一运动检测器。第一运动检测器例如被形成为转速传感器、陀螺仪传感器或磁力计。要明确地指出,本发明不限于使用上述运动传感器。而是可以使用适用于本发明的任何运动传感器。
在本发明的光学系统的一个实施方式中附加地或替代地提出,该像稳定单元的第二光学单元被形成为反射镜系统、例如第一棱镜。例如该反射镜系统被形成为具有反射面的装置,尤其由至少一个反射镜形成的装置,或者被形成为第一棱镜。尤其提出,该像稳定单元的第二光学单元被形成为屋脊棱镜、例如第一屋脊棱镜。上述第一屋脊棱镜尤其被形成为带有屋脊的包尔范德(Bauerfeind)棱镜。在另一个实施方式中,附加地或替代地提出,第一屋脊棱镜的屋脊被形成为如阿米奇(Amici)棱镜的屋脊。在仍另一个实施方式中,附加地或替代地提出,入射到第一屋脊棱镜中的光束在第一屋脊棱镜中被反射三次,即首先在第一屋脊棱镜的屋脊的第一面处,然后在第一屋脊棱镜的屋脊的第二面处,最后在第一屋脊棱镜的第三面处。上述说明内容在再下文中解说的图3中展示。在图3中,由于是二维视图,只能看到三次反射中的两次,因为两次反射在屋脊处重叠并且因此只能看到一次反射。
当本发明的光学系统具有多个光学通道或多个光学子系统时,则在本发明的光学系统的另一个实施方式中提出,本发明的光学系统具有至少一个第二物镜、至少一个第二像稳定单元以及至少一个第二像平面。从第二物镜向第二像平面的方向上看,沿着光学系统的第二光轴首先布置第二物镜、然后布置第二像稳定单元并且然后布置第二像平面。换言之,第二像稳定单元被布置在第二物镜与第二像平面之间。在一个实施方式中提出,第二物镜被形成为用于聚焦,并且第二物镜的至少一个单元例如沿着第二光轴被移位以便聚焦。在另一个实施方式中提出,第二物镜具有至少一个第二正面单元和至少一个第二聚焦单元,其中第二聚焦单元沿着第二光轴被移位以便聚焦。再次替代性地提出,该聚焦通过第二目镜来进行,该第二目镜例如被设置在该光学系统处并且在下文中仍将详细说明。
第二像稳定单元具有至少一个第三光学单元和至少一个第四光学单元。基本上,该第三光学单元是该第二像稳定单元的第一光学单元,并且该第四光学单元是该第二像稳定单元的第二光学单元。第二像稳定单元的第三光学单元例如被布置在第二物镜与第二像稳定单元的第四光学单元之间。此外,第二像稳定单元的第三光学单元被形成为可以围绕第三旋转轴线旋转。所提出的是,第三旋转轴线为第二像稳定单元的第三光学单元围绕其旋转的唯一旋转轴线。然后在这个实施方式中提出,第三光学单元不围绕其他旋转轴线旋转。尤其提出,第三旋转轴线为第二像稳定单元的第三光学单元围绕其旋转的唯一轴线。然后在这个实施方式中提出,第三光学单元不围绕除第三旋转轴线之外的其他旋转轴线旋转。第二像稳定单元的第四光学单元被形成为可以围绕第四旋转轴线旋转。例如在本发明的一个实施方式中提出,第三旋转轴线和第四旋转轴线为不同的轴线。换言之,第三旋转轴线和第四旋转轴线是不平行的。因为在这个实施方式中第三旋转轴线和第四旋转轴线是不同的轴线,在这个实施方式中,第二像稳定单元的第三光学单元围绕第三旋转轴线的旋转以及第二像稳定单元的第四光学单元围绕第四旋转轴线的旋转可以彼此独立地进行。换言之,第二像稳定单元的第三光学单元围绕第三旋转轴线的旋转不一定造成第二像稳定单元的第四光学单元围绕第四旋转轴线的旋转。反而,第二像稳定单元的第三光学单元围绕第三旋转轴线的旋转可以任选地实现第二像稳定单元的第四光学单元围绕第四旋转轴线的旋转。
此外,在本发明的光学系统中提出,第二像稳定单元的第四光学单元为第二光学屋脊单元。第二像稳定单元的第四光学单元例如被形成为第二反射镜系统和/或第二屋脊棱镜。换言之,第二像稳定单元的第四光学单元可以被形成为直视型光学单元或者被形成为仅具有较小的射束偏置。在形成为第二屋脊棱镜方面还参考再上文和再下文的实施方案,这些实施方案在此类似地适用。
如上文已经说明的,第二像稳定单元具有第三光学单元和第四光学单元。通过围绕第三旋转轴线旋转第三光学单元,实现了用本发明的光学系统生成的像在第一方向上的稳定化。通过围绕第四旋转轴线旋转第四光学单元,进行用本发明的光学系统生成的像在第二方向上的稳定化,该第二方向例如被定向为垂直于第一方向。这将在再下文中详细解释。
在本发明的光学系统的一个实施方式中附加地或替代地提出,第二像稳定单元的第四光学单元围绕其旋转的第四旋转轴线以10°至89°的角度相对于第二光轴定向,其中范围边界值同时包括在上述范围内。尤其提出,第四旋转轴线以20°至80°的角度或者30°至70°的角度或者40°至60°的角度相对于第二光轴定向,其中范围边界值包括在上述范围内。在另一个实施方式中例如提出,第四旋转轴线以62.5°的角度相对于第二光轴定向。已经显示出,第四旋转轴线相对于第二光轴的上述定向没有造成干扰性像场旋转或仅造成较小的干扰性像场旋转。由此,上述定向特别适合用于稳定像。
在本发明的光学系统的一个实施方式中附加地或替代地提出,本发明的光学系统具有以下特征之一:
-第二像稳定单元的第三光学单元被布置在第二物镜与第二像稳定单元的第四光学单元之间;
-第二像稳定单元的第四光学单元被布置在第二物镜与第二像稳定单元的第三光学单元之间。
在本发明的光学系统的一个实施方式中附加地或替代地提出,第二像稳定单元的第三光学单元具有至少一个第二反射镜、至少一个第二平面镜和/或至少一个第二棱镜。
此外,在本发明光学系统中附加地或替代地提出,第二像稳定单元的第三光学单元被形成为第二平面镜,其中第二平面镜具有第二镜面。
在本发明的光学系统的另一个实施方式中附加地或替代地提出,第二像稳定单元的第三光学单元具有单独的如下的面:在该面处,入射到该面上光束被反射。例如提出,第二像稳定单元的第三光学单元具有唯一的如下的面:在该面处,入射到该面上光束被反射。换言之,在这另一个实施方式中提出,在第三光学单元处没有布置其他的反射入射光束的面。
在本发明的光学系统的一个实施方式中附加地或替代地提出,由第二像稳定单元的第三光学单元以及用于第三光学单元的第二支架构成的第二系统具有第二重心,其中第三旋转轴线穿过第二重心延伸。第二重心是第二系统的质量重心。在本发明的光学系统的一个实施方式中附加地或替代地提出,由第二像稳定单元的第四光学单元以及用于第四光学单元的支架构成的系统具有重心,其中第四旋转轴线穿过该重心延伸。该重心是该系统的质量重心。在上述实施方式的情况下有利的是,第二像稳定单元基本上平衡地支撑。由此,需要比现有技术更小的转矩即可旋转第二像稳定单元的第三光学单元,使得对用于移动第三光学单元的驱动单元的机械要求较低并且在使用电力运行的驱动单元时与现有技术相比实现了更小的耗电量。
在本发明的光学系统的另一个实施方式中附加地或替代地提出,第二光轴与第二像稳定单元的第三光学单元的第二反射镜单元在第二交点处相交,其中第三旋转轴线穿过第二交点延伸。第二光轴的命中点位于第二反射镜单元的平面中心的略微上方。第二像稳定单元的第三光学单元的第二反射镜单元具有第二中心点,其中第三旋转轴线穿过第二中心点延伸。例如当应当用该光学系统实现特别好的成像时,选择最后提及的这两个实施方式。
在本发明的光学系统的仍另一个实施方式中附加地或替代地提出,第三光学单元围绕其旋转的第三旋转轴线与第二平面相交。此外,在这仍另一个实施方式中提出,第四光学单元围绕其旋转的第四旋转轴线位于上述第二平面中。例如提出,第三旋转轴线沿着坐标系的x轴定向。然后第四旋转轴线位于由y轴和z轴扩展成的平面中。这是yz平面。例如在第三光学单元围绕呈x轴形式的第三旋转轴线旋转时,在本发明的光学系统中进行光束的偏转,从而促成像沿着y轴的偏移。由此可以抵消用本发明光学系统生成的像在像平面中沿着y轴的偏移。于是沿着y轴进行像的稳定化。通过围绕位于上述平面中的第四旋转轴线来旋转第四光学单元,在本发明的光学系统中如下产生光束的偏转,从而促成用本发明光学系统生成的像在本发明光学系统的像平面中沿着x轴的偏移。于是沿着x轴进行像的稳定化。
除了上述有意地将像沿着x轴偏移之外,第二像稳定单元的第四光学单元围绕任意轴线、例如在yz平面中的任意轴线的旋转还可能造成用本发明光学系统生成的像的无意旋转。为了避免这种无意的旋转,在本发明光学系统的一个实施方式中附加地或替代地提出,第四旋转轴线对应于轴,其中在第四光学单元围绕这个轴旋转时不造成无意的像旋转。例如,在本发明光学系统的未经稳定化的状态下,第四旋转轴线被定向为垂直于第二像稳定单元的第三光学单元的第二镜面或光入射面。当没有进行像稳定时就存在未经稳定化的状态。在这个实施方式中,仅仅出现了像沿着x轴的偏移。然后没有出现干扰性的像旋转。在本发明的光学系统的另一个实施方式中附加地或替代地提出,在本发明光学系统的未经稳定化的状态下,第四旋转轴线以50°至130°或者60°至120°或者70°至110°或者80°至100°的角度相对于第二像稳定单元的第三光学单元的镜面或光入射面定向,其中范围边界值包括在上述范围内。
在本发明的光学系统的另一个实施方式中附加地或替代地提出,本发明的光学系统具有以下特征之一:
-第二像检测单元被布置在第二像平面中;
-第二像检测单元被布置在第二像平面中,该第二像检测单元被形成为像传感器、尤其基于半导体的像传感器;
-该光学系统具有至少一个第二目镜,其中从第二目镜向第二像平面的方向上看,首先布置第二像平面并且然后布置第二目镜。由此,上述实施方式从第二物镜向第二像平面的方向看具有以下的各单元顺序:第二物镜-第二像稳定单元-第二像平面-第二目镜。在另一个实施方式中提出,第二物镜的第二像平面和第二目镜的第二像平面重合。
在本发明的光学系统的另一个实施方式中附加地或替代地提出,该光学系统具有第二壳体,其中第二物镜、第二像稳定单元以及第二像平面被布置在这个第二壳体中。在本发明的光学系统的另一个实施方式中附加地或替代地提出,第二目镜被布置在第二壳体中。
在本发明的光学系统的再另一个实施方式中附加地或替代地提出,第二像稳定单元被形成为第二转像系统。尤其提出,第二像稳定单元被形成为第二棱镜转像系统或第二透镜转像系统。在转像系统方面,上文所述内容还适用。
在本发明的光学系统的另一个实施方式中附加地或替代地提出,该光学系统具有以下特征之一:
-用于移动第二像稳定单元的第三光学单元和/或第四光学单元的至少一个第二驱动单元;
-用于移动第二像稳定单元的第三光学单元和/或第四光学单元的至少一个第二驱动单元,其中第二驱动单元具有至少一个第二压电陶瓷装置;
-用于移动第二像稳定单元的第三光学单元和/或第四光学单元的至少一个第二驱动单元,其中第二驱动单元具有至少一个第二压电作动器;
-用于移动第二像稳定单元的第三光学单元和/或第四光学单元的至少一个第二驱动单元,其中第二驱动单元具有至少一个第二弯曲作动器;
-用于移动第二像稳定单元的第三光学单元和/或第四光学单元的至少一个第二驱动单元,其中第二驱动单元具有至少一个第二压电-超声波作动器;
-用于移动第二像稳定单元的第三光学单元和/或第四光学单元的至少一个第二驱动单元,其中第二驱动单元具有至少一个第二压电-行波作动器;
-用于移动第二像稳定单元的第三光学单元和/或第四光学单元的至少一个第二驱动单元,其中第二驱动单元具有至少一个第二电机。例如第二电机被形成为直流电机、步进电机或音圈电机;
-用于移动第二像稳定单元的第三光学单元和/或第四光学单元的至少一个第二驱动单元,以及用于控制/调节第二驱动单元的至少一个第二控制和/或调节单元。
观察已经得出,将上述驱动单元中的至少一个驱动单元形成为基于压电技术的驱动单元是特别有利的。为此参考再上文的内容。
在本发明的光学系统的仍另一个实施方式中附加地或替代地提出,该光学系统具有用于测定该光学系统的运动(例如转动式和/或平动式抖动)的至少一个第二运动检测器。第二运动检测器例如被形成为转速传感器、陀螺仪传感器或磁力计。要明确地指出,本发明不限于使用上述运动传感器。而是可以使用适用于本发明的任何运动传感器。
在本发明的光学系统的一个实施方式中附加地或替代地提出,第二像稳定单元的第四光学单元被形成为第二反射镜系统。尤其提出,第二像稳定单元的第四光学单元被形成为第二屋脊棱镜。上述第二屋脊棱镜尤其被形成为带有屋脊的包尔范德棱镜。在另一个实施方式中,附加地或替代地提出,第二屋脊棱镜的屋脊被形成为如阿米奇棱镜的屋脊。在仍另一个实施方式中,附加地或替代地提出,入射到第二屋脊棱镜中的光束在第二屋脊棱镜中被反射三次,即首先在第二屋脊棱镜的屋脊的第一面处,然后在第二屋脊棱镜的屋脊的第二面处,最后在第二屋脊棱镜的第三面处。
在本发明的光学系统的另一个实施方式中附加地或替代地提出,第一壳体被形成为镜筒。附加地或替代地提出,第二壳体被形成为镜筒。
本发明的光学系统的具有两个壳体的实施方式基本上具有两个光学子系统。于是,在第一壳体中布置有第一光学子系统(例如用于使用者的两只眼睛中的一只)。相反,在第二壳体中布置有第二光学子系统(例如用于使用者的两只眼睛中的另一只)。
在本发明的光学系统的再另一个实施方式中附加地或替代地提出,第一壳体经由至少一个弯桥与第二壳体相连。弯桥具有布置在第一壳体处的至少一个第一铰接件。弯桥还具有布置在第二壳体处的至少一个第二铰接件。弯桥可以如下地实现对光学系统的设定,使得第一壳体和第二壳体可以对使用者的眼间距进行设定。第一壳体和第二壳体于是相对彼此被布置为,使得第一壳体被布置在使用者的两只眼睛中的一只处,而第二壳体被布置在使用者的两只眼睛中的另一只处。换言之可以如下进行表述。第一目镜具有第一目镜轴线,相反,第二目镜具有第二目镜轴线。使用者的第一只眼睛具有第一眼轴线,而使用者的第二只眼睛具有第二眼轴线。第一壳体和第二壳体于是相对彼此被布置为,使得第一目镜轴线以及第一眼轴线对齐,并且第二目镜轴线和第二眼轴线对齐。在此处阐释的实施方式中,通过使用弯桥,不需要借助于菱形棱镜来设定瞳距。
在本发明的光学系统的一个实施方式中附加地或替代地提出,该光学系统具有用于识别该弯桥的弯折角度的至少一个传感器。例如利用第一控制和/或调节单元和/或第二控制和/或调节单元基于坐标变换和/或其他数学方法来将设想用于第一驱动单元的来自第一坐标系的控制和/或调节信号转换成用于第二驱动单元的在第二坐标系中的控制和/或调节信号。当本发明的光学系统仅具有单一的运动检测器或者仅使用单一的运动检测器时,这是尤其有利的。
如上已经提及的,在本发明的光学系统的另一个实施方式中,该光学系统具有单一的控制和/或调节单元,用于控制/调节第一驱动单元从而移动第一像稳定单元的第一光学单元和/或第二光学单元,以及用于控制/调节第二驱动单元从而移动第二像稳定单元的第三光学单元和/或第四光学单元。这个实施方式由此提出将单一的控制和/或调节单元用于两个驱动单元,即用于第一驱动单元和第二驱动单元。
在本发明的光学系统的另一个实施方式中附加地或替代地提出,在第一运动检测器和第二运动检测器被布置在第一壳体中。在本发明的光学系统的仍另一个实施方式中附加地或替代地提出,第一运动检测器和第二运动检测器被布置在第二壳体中。在上述实施方式中,第一运动检测器检测向第一方向的运动并且第二运动检测器检测向第二方向的运动。替代地提出,第一运动检测器被布置在第一壳体中,或者第二运动检测器被布置在第二壳体中。在这个实施方式中,第一运动检测器检测向至少一个第一方向以及向至少一个第二方向的运动,并且第二运动检测器检测向至少一个第一方向以及向至少一个第二方向的运动。
如上文已经阐释的,在本发明光学系统的一个实施方式中附加地或替代地提出,第一像稳定单元被形成为棱镜转像系统。例如在本发明的光学系统的这个实施方式中提出,第一像稳定单元的第一光学单元被形成为第一棱镜,并且第一像稳定单元的第二光学单元被形成为第二棱镜。第一棱镜可以具有在再上文或再下文关于第一光学单元、尤其关于第一平面镜所提及的至少一种特征或特征组合。第二棱镜可以具有在再上文或再下文关于第二光学单元所提及的至少一种特征或特征组合。例如第一棱镜具有在第一棱镜内部的面,在该面处,光束通过全反射或通过反射镜层被转向。尤其在本发明的光学系统的一个实施方式中提出,第一像稳定单元被形成为阿贝-科尼希
如上文已经阐释的,在本发明光学系统的另一个实施方式中附加地或替代地提出,第二像稳定单元被形成为棱镜转像系统。例如在本发明的光学系统的这个实施方式中提出,第二像稳定单元的第三光学单元被形成为第三棱镜,并且第二像稳定单元的第四光学单元被形成为第四棱镜。第三棱镜可以具有在再上文或再下文关于第三光学单元、尤其关于第二平面镜所提及的至少一种特征或特征组合。第四棱镜可以具有在再上文或再下文关于第四光学单元所提及的至少一种特征或特征组合。例如第三棱镜具有在第三棱镜内部的面,在该面处,光束通过全反射或通过反射镜层被转向。尤其在本发明的光学系统的一个实施方式中提出,第二像稳定单元被形成为阿贝-科尼希棱镜系统、施密特-佩韩棱镜系统或波罗棱镜系统。第四棱镜例如被设计为屋脊棱镜。
本发明还涉及一种用于操作光学系统的方法。在该方法中使像稳定化。该光学系统具有再上文或再下文提及的至少一个特征或者再上文或再下文提及的至少两个特征的组合。该方法具有以下步骤:
-用第一运动检测器和/或第二运动检测器检测该光学系统的运动并且生成运动信号;
-利用该光学系统的计算单元取决于该运动信号来确定以下单元中至少一个单元的以下额定位置中的至少一个额定位置:(i)第一像稳定单元的第一光学单元的第一额定位置,(ii)第一像稳定单元的第二光学单元的第二额定位置,(iii)第二像稳定单元的第三光学单元的第三额定位置,以及(iv)第二像稳定单元的第四光学单元的第四额定位置。这些额定位置尤其取决于不同的预设值和所希望的工作模式来确定,例如预设的稳定程度和/或光学系统的预设用途,例如在在运动中的交通工具上使用;
-利用第一驱动单元的至少一个第一位置传感器和/或利用第二驱动单元的至少一个第二位置传感器来确定以下单元中的至少一个单元的以下实际位置中的至少一个实际位置:(i)第一像稳定单元的第一光学单元的第一实际位置,(ii)第一像稳定单元的第二光学单元的第二实际位置,(iii)第二像稳定单元的第三光学单元的第三实际位置,以及(iv)第二像稳定单元的第四光学单元的第四实际位置;
-在使用第一控制和/或调节单元和/或第二控制和/或调节单元的情况下对比以下位置:(i)第一像稳定单元的第一光学单元的第一实际位置与第一像稳定单元的第一光学单元的第一额定位置,(ii)第一像稳定单元的第二光学单元的第二实际位置与第一像稳定单元的第二光学单元的第二额定位置,(iii)第二像稳定单元的第三光学单元的第三实际位置与第二像稳定单元的第三光学单元的第三额定位置,以及(iv)第二像稳定单元的第四光学单元的第四实际位置与第二像稳定单元的第四光学单元的第四额定位置;并且
-执行以下步骤中的至少一个步骤:
a)当第一像稳定单元的第一光学单元的第一实际位置与第一像稳定单元的第一光学单元的第一额定位置不同时,在使用第一控制和/或调节单元和/或第二控制和/或调节单元的情况下如此控制和/或调节第一驱动单元,使得第一像稳定单元的第一光学单元通过围绕第一旋转轴线旋转而尤其迭代地被移动到第一额定位置中;
b)当第一像稳定单元的第二光学单元的第二实际位置与第一像稳定单元的第二光学单元的第二额定位置不同时,在使用第一控制和/或调节单元和/或第二控制和/或调节单元的情况下如此控制和/或调节第一驱动单元,使得第一像稳定单元的第二光学单元通过围绕第二旋转轴线旋转而尤其迭代地被移动到第二额定位置中;
c)当第二像稳定单元的第三光学单元的第三实际位置与第二像稳定单元的第三光学单元的第三额定位置不同时,在使用第一控制和/或调节单元和/或第二控制和/或调节单元的情况下如此控制和/或调节第二驱动单元,使得第二像稳定单元的第三光学单元通过围绕第三旋转轴线旋转而尤其迭代地被移动到第三额定位置中;
d)当第二像稳定单元的第四光学单元的第四实际位置与第二像稳定单元的第四光学单元的第四额定位置不同时,在使用第一控制和/或调节单元和/或第二控制和/或调节单元的情况下如此控制和/或调节第二驱动单元,使得第二像稳定单元的第四光学单元通过围绕第四旋转轴线旋转而尤其迭代地被移动到第四额定位置中。
第一控制和/或调节单元可以被形成为第一PID调节器。此外,第二控制和/或调节单元可以被形成为第二PID调节器。
现在将通过附图借助于实施方式详细说明本发明。在附图中:
图1示出呈具有弯桥的双筒望远镜形式的光学系统的示意图;
图2示出根据图1的双筒望远镜的另一个示意图;
图3示出第二光学子系统的示意图;
图4示出根据图3的第二光学子系统的另一个示意图;
图5示出呈双筒望远镜形式的另一个光学系统的示意图;
图6示出呈双筒望远镜形式的再另一个光学系统的示意图;
图7示出根据图6的双筒望远镜的第二光学子系统的示意图;并且
图8示出本发明方法的一个实施方式的流程图的示意图。
下面将阐释本发明的实施方式。光学系统的第一实施方式为双目式双筒望远镜1(以下简称为双筒望远镜)。但是要明确地指出,本发明不限于双目式双筒望远镜。反而,本发明适合用于任何光学系统,例如还适合用于单筒望远镜,如再下文仍将详述的。例如提出,以下解说的实施方式具有再上文提及的至少一个特征或者再上文提及的至少两个特征的组合。
图1示出双筒望远镜1的第一示意图,该双筒望远镜具有镜筒状的第一壳体2和镜筒状的第二壳体3。第一光轴10延伸穿过第一壳体2。相反,第二光轴11延伸穿过第二壳体3。第一壳体2经由弯桥4与第二壳体3相连。弯桥4具有第一铰接件5,该第一铰接件布置在第一壳体2处。弯桥4还具有第二铰接件6,该第二铰接件布置在第二壳体3处。第一铰接件5具有第一接纳件7和第二接纳件8,在这些接纳件之间布置有第二铰接件6的第三接纳件9。轴螺栓(未示出)延伸穿过第一接纳件7、第二接纳件8以及第三接纳件9,使得可以围绕铰接轴74来设定第一壳体2和第二壳体3相对彼此的相对位置。以此方式可以将第一壳体2和第二壳体3设定到使用者的瞳距上,使得一方面第一壳体2被布置在使用者的两只眼睛中的一只处,而另一方面第二壳体3被布置在使用者的两只眼睛中的另一只处。
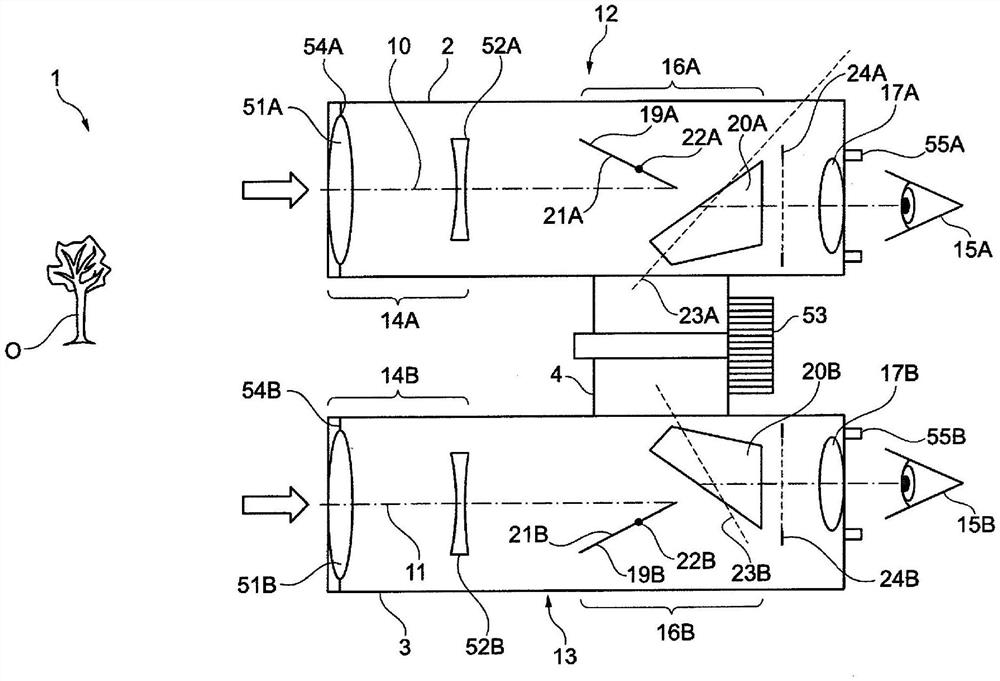
图2示出双筒望远镜1的另一个图示。第一壳体2具有第一光学子系统12。第一光学子系统12设置有第一物镜14A、第一像稳定单元16A和第一目镜17A。
使用者的第一只眼睛15A可以放置在第一目镜17A处以便观察物体O。由于第一像稳定单元16A,第一光学子系统12的第一光轴10侧向略微偏置,从而阶梯状地形成第一光轴10。
在这个实施方式中,第一物镜14A具有第一正面单元51A和第一聚焦单元52A。第一物镜14A的其他实施方式设置有不同数量的单独透镜或由透镜形成的转像透镜(Kittgliedern)。为了将通过双筒望远镜1观察的物体O聚焦的目的,可以将第一目镜17A或第一聚焦单元52A沿着第一光轴10轴向移位。在另一个实施方式中,将第一正面单元51A或者甚至整个第一物镜14A沿着第一光轴10移位。在另一个实施方式中,将第一正面单元51A和第一聚焦单元52A相对彼此移位。
第一像稳定单元16A具有第一光学单元19A和第二光学单元20A。第一光学单元19A被布置在第一物镜14A与第二光学单元20A之间。在这个实施方式中,第一光学单元19A被形成为第一平面镜,其中第一光学单元19A在光入射侧处具有第一镜面21A。第二光学单元20A被形成为屋脊棱镜。该屋脊棱镜例如具有再上文关于屋脊棱镜提及的至少一个特征或者再上文关于屋脊棱镜提及的至少两个特征的组合。
第一像稳定单元16A的第一光学单元19A被形成为可以围绕第一旋转轴线22A旋转,其中第一旋转轴线22A垂直地向图平面中延伸。第一旋转轴线22A为第一像稳定单元16A的第一光学单元19A围绕其旋转的唯一旋转轴线。然后在这个实施方式中提出,第一光学单元19A不围绕其他旋转轴线旋转。第一像稳定单元16A的第二光学单元20A被形成为可以围绕第二旋转轴线23A旋转。在这个实施方式中提出,第一旋转轴线22A和第二旋转轴线23A为不同的轴线。这仍将在再下文中详细解释。
在另一个实施方式中提出,第一光学单元19A具有单独的如下的面:在该面处,入射到该面上光束被反射。例如提出,第一光学单元19A具有唯一的如下的面:在该面处,入射到该面上光束被反射。换言之,在这另一个实施方式中提出,在第一光学单元19A处没有布置其他的反射入射光束的面。
第二壳体3具有第二光学子系统13。第二光学子系统13设置有第二物镜14B、第二像稳定单元16B和第二目镜17B。使用者的第二只眼睛15B可以放置在第二目镜17B处以便观察物体O。由于第二像稳定单元16B,第二光学子系统13的第二光轴11侧向略微偏置,从而阶梯状地形成第二光轴11。
在这个实施方式中,第二物镜14B具有第二正面单元51B和第二聚焦单元52B。第二物镜14B的其他实施方式设置有不同数量的单独透镜或由透镜形成的转像透镜。为了将通过双筒望远镜1观察的物体O聚焦的目的,可以将第二目镜17B或第二聚焦单元52B沿着第二光轴11轴向移位。在另一个实施方式中,将第二正面单元51B或者甚至整个第二物镜14B沿着第二光轴11移位。在另一个实施方式中,将第二正面单元51B和第二聚焦单元52B相对彼此移位。
第二像稳定单元16B具有第三光学单元19B和第四光学单元20B。第三光学单元19B被布置在第二物镜14B与第四光学单元20B之间。在这个实施方式中,第三光学单元19B被形成为第二平面镜,其中第三光学单元19B在光入射侧处具有第二镜面21B。第四光学单元20B被形成为屋脊棱镜。该屋脊棱镜例如具有再上文关于屋脊棱镜提及的至少一个特征或者再上文关于屋脊棱镜提及的至少两个特征的组合。
第二像稳定单元16B的第三光学单元19B被形成为能够围绕第三旋转轴线22B旋转,其中第三旋转轴线22B垂直地向图平面中延伸。第三旋转轴线22B为第二像稳定单元16B的第三光学单元19B围绕其旋转的唯一旋转轴线。然后在这个实施方式中提出,第三光学单元19B不围绕其他旋转轴线旋转。第二像稳定单元16B的第四光学单元20B被形成为能够围绕第四旋转轴线23B旋转。在这个实施方式中提出,第三旋转轴线22B和第四旋转轴线23B为不同的轴线。这仍将在再下文中详细解释。
在另一个实施方式中提出,第三光学单元19B具有单独的如下的面:在该面处,入射到该面上光束被反射。例如提出,第三光学单元19B具有唯一的如下的面:在该面处,入射到该面上光束被反射。换言之,在这另一个实施方式中提出,在第三光学单元19B处没有布置其他的反射入射光束的面。
在上面展示的这两个光学子系统12、13中,入射到光学子系统12、13的光束的射束方向如下:物体O-物镜14A、14B-像稳定单元16A、16B-目镜17A、17B-眼睛15A、15B。
为了聚焦,在此处所示的实施方式中在弯桥4处布置旋钮53,利用该旋钮可以将第一聚焦单元52A和第二聚焦单元52B共同沿着第一光轴10和第二光轴11移位。在另一个实施方式中提出,将第一物镜14A和第二物镜14B(或者至少第一物镜14A和第二物镜14B的单元)相对彼此调整。
在此处所示的实施方式中,第一物镜14A以及第二物镜14B在被指配给相应物镜14A、14B的像平面中生成相对于所观察物体O倒立的实像。被指配给第一物镜14A的第一像稳定单元16A为第一转像系统。此外,被指配给第二物镜14B的第二像稳定单元16B为第二转像系统。上述这两个转像系统被用于正像。因此,倒立的像被再次正立并且形成在新的像平面中,即第一壳体2中的第一中间像平面24A或第二壳体3中的第二中间像平面24B。在第一中间像平面24A中例如布置有清晰地限定视场的第一视场光阑。此外,在第二中间像平面24B中例如可以布置有清晰地限定视场的第二视场光阑。
第一目镜17A被用于使第一中间像平面24A的像成像到任意的距离上,例如成像到无穷远或其他距离上。此外,第二目镜17B被用于使第二中间像平面24B的像成像到任意的距离上,例如成像到无穷远或其他距离上。
第一光学子系统12的第一孔径光阑54A和第二光学子系统13的第二孔径光阑54B可以通过装嵌对应的光学子系统12、13的光学元件,一般通过装嵌第一正面单元51A和第二正面单元51B的透镜,或者通过分开的光阑来形成。在射束方向上可以通过对应的光学子系统12或13成像到平面中,该平面在射束方向上位于对应的目镜17A或17B后方并且典型地与之具有5至25mm的距离。这个平面被称为出射光瞳平面。
为了保护使用者免受侧向入射光影响,在第一目镜17A处可以设置可伸出、可旋出或可翻折的第一眼杯55A并且在第二目镜17B处可以设置可伸出、可旋出或可翻折的第二眼杯55B。
图3示出布置在第二壳体3中的第二光学子系统13的示意图。图3基于图2的第二光学子系统13的图示。相同的构造单元设置有相同的附图标记。布置在第一壳体2中的第一光学子系统12具有与第二光学子系统13基本上相同的构造。因此,以下关于第二光学子系统13的实施方案对应地还适用于第一光学子系统12。当本发明的光学系统例如被形成为单目镜、单筒望远镜或观靶镜时,该光学系统具有与图3中所示的基本上相同的构造。于是,以下的实施方案还适用于这些光学系统。
如上文已经提及的,第二像稳定单元16B的第三光学单元19B被形成为能够围绕第三旋转轴线22B旋转,其中第三旋转轴线22B垂直地向图平面中延伸。第二像稳定单元16B的第四光学单元20B被形成为能够围绕第四旋转轴线23B旋转。在这个实施方式中提出,第三旋转轴线22B和第四旋转轴线23B为不同的轴线。第四旋转轴线23B例如如再上文已经阐释地关于第二光轴11定向。
由第二像稳定单元16B的第三光学单元19B以及用于第三光学单元19B的第二支架构成的第二系统具有第二重心,其中第三旋转轴线22B穿过第二重心延伸。第二重心是第二系统的质量重心。这具有以下优点:第二像稳定单元16B的第三光学单元19B基本上平衡地支撑。由此,需要比现有技术更小的转矩即可旋转第二像稳定单元16B的第三光学单元19B,使得对用于移动第三光学单元19B的驱动单元的机械要求较低并且在使用电力运行的驱动单元时与现有技术相比实现了更小的耗电量。
此外,在本发明的在此阐释过的实施方式中提出,第二光轴11与第二像稳定单元16B的第三光学单元19B的第二镜面21B在第二交点处相交,其中第三旋转轴线22B穿过第二交点延伸。第二光轴11的命中点位于第二镜面21B的中心的略微上方。第二像稳定单元16B的第三光学单元19B的第二镜面21B可以具有第二中心点,其中第三旋转轴线22B穿过第二中心点延伸。例如当应当用该光学系统(例如双筒望远镜1)实现特别好的成像时,选择最后提及的这两个实施方式。
在本发明的一个实施方式中提出,第三光学单元22B围绕其旋转的第三旋转轴线19B与第二平面相交。此外在这个实施方式中提出,第四光学单元23B围绕其旋转的第四旋转轴线20B位于上述第二平面中。例如提出,第三旋转轴线22B沿着上述坐标系的x轴定向。然后第四旋转轴线23B位于由y轴和z轴扩展成的平面中。这是yz平面。例如在第三光学单元19B围绕呈x轴形式的第三旋转轴线22B旋转时,在第二光学子系统13中进行光束的偏转,从而促成像在像平面中沿着y轴的偏移。由此可以抵消用第二光学子系统13生成的像沿着y轴的偏移。于是沿着y轴进行像的稳定化。通过围绕位于上述平面中的第四旋转轴线23B来旋转第四光学单元20B,在第二光学子系统13中产生光束的偏转,从而促成用光学子系统13生成的像在像平面中沿着x轴的偏移。于是沿着x轴进行像的稳定化。
除了上述有意地将像沿着x轴偏移之外,第二像稳定单元16B的第四光学单元20B围绕任意轴线、例如在yz平面中的任意轴线的旋转还可能造成用第二光学子系统13生成的像的无意旋转。为了避免无意的旋转,在一个实施方式中提出,在第二光学子系统13的未经稳定化的状态下,第四旋转轴线23B被定向为垂直于第二像稳定单元16B的第三光学单元19B的第二镜面21B。当没有进行像稳定时就存在未经稳定化的状态。在这个实施方式中,仅仅出现了像沿着x轴的偏移。然后没有出现干扰性的像旋转。
在另一个实施方式中,附加地或替代地提出,第二像检测单元布置在第二光学子系统13的像平面中,该第二像检测单元例如被形成为基于半导体的像传感器。
为了围绕第三旋转轴线22B旋转第三光学单元19B并且为了围绕第四旋转轴线23B旋转第四光学单元20B,在本发明中使用在图4中所示的驱动单元。图4基于图3。相同的构造单元设置有相同的附图标记。
第二反射镜驱动单元25B被布置在第二壳体3中,该第二反射镜驱动单元提供用于围绕第三旋转轴线22B旋转第三光学单元19B的力。此外,第二棱镜驱动单元26B被布置在第二壳体3中,该第二棱镜驱动单元提供用于围绕第四旋转轴线23B旋转第四光学单元20B的力。第二棱镜驱动单元26B为此与第四光学单元20B的支架28B共同作用。第二反射镜驱动单元25B和/或第二棱镜驱动单元26B例如被形成为压电陶瓷装置、压电作动器、压电弯曲作动器、压电-超声波作动器、压电-行波作动器、直流电机、步进电机或音圈电机。要明确地指出,本发明不限于使用上述驱动单元。而是对于本发明可以使用适用于本发明的任何驱动单元。
观察已经得出,将上述驱动单元中的至少一个驱动单元形成为基于压电技术的驱动单元是特别有利的。为此参考再上文的内容。
在第二壳体3中还布置有第二控制和/或调节单元27B,该第二控制和/或调节单元向第二反射镜驱动单元25B和第二棱镜驱动单元26B发送控制和/或调节信号。此外,在第二壳体3中布置有第二运动检测器29B。第二运动检测器29B用于测定该光学系统的运动(例如转动式和/或平动式抖动)。第二运动检测器29B例如被形成为转速传感器、陀螺仪传感器或磁力计。要明确地指出,本发明不限于使用上述运动传感器。而是可以使用适用于本发明的任何运动传感器。
图5示出双筒望远镜1的另一个实施方式。在双筒望远镜1的这个实施方式中,在第二壳体3中布置有第二反射镜驱动单元25B和第二棱镜驱动单元26B。此外,在第一壳体2中布置有第一反射镜驱动单元25A和第一棱镜驱动单元26A,该第一反射镜驱动单元和第一棱镜驱动单元在第一光学子系统12中具有与第二光学子系统13中的第二反射镜驱动单元25B和第二棱镜驱动单元26B相同的功能和效果。在弯桥4处布置有运动检测器27。此外,在弯桥4处布置有供电单元28。供电单元28例如被形成为电池或蓄电池。另外,在弯桥4处布置有弯桥传感器29。在第一壳体2中还布置有第一控制和/或调节单元27A,该第一控制和/或调节单元与第一反射镜驱动单元25A、第一棱镜驱动单元26A、第二反射镜驱动单元25B、第二棱镜驱动单元26B、运动检测器27、供电单元28和弯桥传感器29传导地连接。
弯桥传感器29用于识别弯桥4的弯折角度。利用第一控制和/或调节单元27A,基于坐标变换和/或其他数学方法,将基于用运动检测器27检测的抖动和转动对于第一反射镜驱动单元25A和第一棱镜驱动单元26A计算的来自第一坐标系的控制和/或调节信号转换成用于第二反射镜驱动单元25B和第二棱镜驱动单元26B的在第二坐标系中的控制和/或调节信号。
图6示出本发明的另一个实施方式。图6的实施方式基于图2的实施方式。相同的构造单元设置有相同的附图标记。因此请参考上文的实施方案,这些结论在此仍然适用。
在图6中示出的实施方式中,第一像稳定单元16A被形成为棱镜转像系统。第一像稳定单元16A具有第一光学单元19A和第二光学单元20A。第一光学单元19A被形成为第一棱镜。第二光学单元20A被形成为第二棱镜。第一像稳定单元16A例如被形成为阿贝-科尼希棱镜系统、施密特-佩韩棱镜系统或波罗棱镜系统。
根据图6的第一像稳定单元16A的第一光学单元19A被形成为可以围绕第一旋转轴线22A旋转,其中第一旋转轴线22A垂直地向图平面中延伸。第一旋转轴线22A为第一像稳定单元16A的第一光学单元19A围绕其旋转的唯一旋转轴线。然后在这个实施方式中提出,第一光学单元19A不围绕其他旋转轴线旋转。第一像稳定单元16A的第二光学单元20A被形成为可以围绕第二旋转轴线23A旋转。在这个实施方式中提出,第一旋转轴线22A和第二旋转轴线23A为不同的轴线。第二旋转轴线23A例如如再上文已经阐释地关于第一光轴10定向。
根据图6的第一光学单元19A可以具有再上文关于根据图2的第一光学单元19A所提及的至少一个特征或者至少两个特征的组合。根据图6的第二光学单元20A可以具有再上文关于根据图2的第二光学单元20A所提及的至少一个特征或者至少两个特征的组合。例如根据图6的第一光学单元19A和第二光学单元20A分别具有反射侧,在该反射侧处通过全反射或反射镜层将光束转向。
在图6中示出的实施方式中,第二像稳定单元16B被形成为棱镜转像系统。第二像稳定单元16B具有第三光学单元19B和第四光学单元20B。第三光学单元19B被形成为第三棱镜。第四光学单元20B被形成为第四棱镜。第二像稳定单元16B例如被形成为阿贝-科尼希棱镜系统、施密特-佩韩棱镜系统或波罗棱镜系统。
根据图6的第二像稳定单元16B的第三光学单元19B被形成为能够围绕第三旋转轴线22B旋转,其中第三旋转轴线22B垂直地向图平面中延伸。第三旋转轴线22B为第二像稳定单元16B的第三光学单元19B围绕其旋转的唯一旋转轴线。然后在这个实施方式中提出,第三光学单元19B不围绕其他旋转轴线旋转。第二像稳定单元16B的第四光学单元20B被形成为能够围绕第四旋转轴线23B旋转。在这个实施方式中提出,第三旋转轴线22B和第四旋转轴线23B为不同的轴线。
根据图6的第三光学单元19B可以具有再上文关于根据图2的第三光学单元19B所提及的至少一个特征或者至少两个特征的组合。根据图6的第四光学单元20B可以具有再上文关于根据图2的第四光学单元20B所提及的至少一个特征或者至少两个特征的组合。例如根据图6的第三光学单元19B和第四光学单元20B分别具有反射侧,在该反射侧处通过全反射或反射镜层将光束转向。
根据图6的实施方式可以具有与已经关于图4和图5阐释的相同的驱动单元、运动检测器、控制和/或调节单元、相同的弯桥传感器和相同的供电单元。于是,上述实施方案还适用于图6的实施方式。
图7示出布置在第二壳体3中的第二光学子系统13的示意图。图7基于图6的第二光学子系统13的图示。相同的构造单元设置有相同的附图标记。布置在第一壳体2中的第一光学子系统12具有与第二光学子系统13基本上相同的构造。因此,以下关于第二光学子系统13的实施方案对应地还适用于第一光学子系统12。当本发明的光学系统例如被形成为单目镜、单筒望远镜或观靶镜时,该光学系统具有与图6中所示的基本上相同的构造。于是,以下的实施方案还适用于这些光学系统。
如上文已经提及的,第二像稳定单元16B的第三光学单元19B被形成为能够围绕第三旋转轴线22B旋转,其中第三旋转轴线22B垂直地向图平面中延伸。第二像稳定单元16B的第四光学单元20B被形成为能够围绕第四旋转轴线23B旋转。在这个实施方式中提出,第三旋转轴线22B和第四旋转轴线23B为不同的轴线。
由第二像稳定单元16B的第三光学单元19B以及用于第三光学单元19B的支架构成的第二系统具有第二重心,其中第三旋转轴线22B穿过第二重心延伸。第二重心是第二系统的质量重心。这具有以下优点:第二像稳定单元16B的第三光学单元19B基本上平衡地支撑。由此,需要比现有技术更小的转矩即可旋转第二像稳定单元16B的第三光学单元19B,使得对用于移动第三光学单元19B的驱动单元的机械要求较低并且在使用电力运行的驱动单元时与现有技术相比实现了更小的耗电量。
此外,在本发明的在此阐释过的实施方式中提出,第二光轴11与第三光学单元19B的反射面在第二交点处相交,其中第三旋转轴线22B穿过第二交点延伸。第二光轴11的命中点位于反射面的中心的略微上方。第二像稳定单元16B的第三光学单元19B的反射面可以具有第二中心点,其中第三旋转轴线22B穿过第二中心点延伸。反射面例如为在呈第一棱镜形式的第三光学单元19B内部的面,在该面处通过全反射来使入射光转向。替代于此,反射面为反射镜层。
在本发明的一个实施方式中提出,第三光学单元22B围绕其旋转的第三旋转轴线19B与第二平面相交。此外在这个实施方式中提出,第四光学单元23B围绕其旋转的第四旋转轴线20B位于上述第二平面中。例如提出,第三旋转轴线22B沿着上述坐标系的x轴定向。然后第四旋转轴线23B位于由y轴和z轴扩展成的平面中。这是yz平面。例如在第三光学单元19B围绕呈x轴形式的第三旋转轴线22B旋转时,在第二光学子系统13中进行光束的偏转,从而促成像在像平面中沿着y轴的偏移。由此可以抵消用第二光学子系统13生成的像沿着y轴的偏移。于是沿着y轴进行像的稳定化。通过围绕位于上述平面中的第四旋转轴线23B来旋转第四光学单元20B,在第二光学子系统13中产生光束的偏转,从而促成用光学子系统13生成的像在像平面中沿着x轴的偏移。于是沿着x轴进行像的稳定化。
除了上述有意地将像沿着x轴偏移之外,第二像稳定单元16B的第四光学单元20B围绕任意轴线、例如在yz平面中的任意轴线的旋转还可能造成用第二光学子系统13生成的像的无意旋转。为了避免无意的旋转,在一个实施方式中提出,在第二光学子系统13的未经稳定化的状态下,第四旋转轴线23B被定向为垂直于第二像稳定单元16B的第三光学单元19B的反射面。当没有进行像稳定时就存在未经稳定化的状态。在这个实施方式中,仅仅出现了像沿着x轴的偏移。然后没有出现干扰性的像旋转。
在图8中展示了根据图5的用于操作双筒望远镜1的本发明方法的实施方式的流程图。在该方法中,将利用双筒望远镜1生成的像稳定化。在方法步骤S1中,用运动检测器27来检测双筒望远镜1的运动并且生成运动信号。在方法步骤S2中,利用双筒望远镜1的计算单元取决于运动信号来确定以下单元中至少一个单元的以下额定位置中的至少一个额定位置:(i)第一像稳定单元16A的第一光学单元19A的第一额定位置,(ii)第一像稳定单元16A的第二光学单元20A的第二额定位置,(iii)第二像稳定单元16B的第三光学单元19B的第三额定位置,以及(iv)第二像稳定单元16B的第四光学单元20B的第四额定位置。这些额定位置尤其取决于预设的稳定程度和/或双筒望远镜1的预设用途(例如在在运动中的交通工具上使用)来确定。在方法步骤S3中,利用第一反射镜驱动单元25A、第一棱镜驱动单元26A、第二反射镜驱动单元25B以及第二棱镜驱动单元26B的至少一个第一位置传感器来确定以下单元中的至少一个单元的以下实际位置中的至少一个实际位置:(i)第一像稳定单元16A的第一光学单元19A的第一实际位置,(ii)第一像稳定单元16A的第二光学单元20A的第二实际位置,(iii)第二像稳定单元16B的第三光学单元19B的第三实际位置,以及(iv)第二像稳定单元16B的第四光学单元20B的第四实际位置。在方法步骤S4中,在使用第一控制和/或调节单元27A的情况下对比以下位置:(i)第一像稳定单元16A的第一光学单元19A的第一实际位置与第一像稳定单元16A的第一光学单元19A的第一额定位置,(ii)第一像稳定单元16A的第二光学单元20A的第二实际位置与第一像稳定单元16A的第二光学单元20A的第二额定位置,(iii)第二像稳定单元16B的第三光学单元19B的第三实际位置与第二像稳定单元16B的第三光学单元19B的第三额定位置,以及(iv)第二像稳定单元16B的第四光学单元20B的第四实际位置与第二像稳定单元16B的第四光学单元20B的第四额定位置。在方法步骤S5中,执行以下步骤中的至少一个步骤:
(i)当第一像稳定单元16A的第一光学单元19A的第一实际位置与第一像稳定单元16A的第一光学单元19A的第一额定位置不同时,在使用第一控制和/或调节单元27A的情况下调节第一反射镜驱动单元25A,使得第一像稳定单元16A的第一光学单元19A通过围绕第一旋转轴线22A旋转而接近第一额定位置;
(ii)当第一像稳定单元16A的第二光学单元20A的第二实际位置与第一像稳定单元16A的第二光学单元20A的第二额定位置不同时,在使用第一控制和/或调节单元27A的情况下调节第一棱镜驱动单元26A,使得第一像稳定单元16A的第二光学单元20A通过围绕第二旋转轴线23A旋转而接近第二额定位置;
(iii)当第二像稳定单元16B的第三光学单元19B的第三实际位置与第二像稳定单元16B的第三光学单元19B的第三额定位置不同时,在使用第一控制和/或调节单元27A的情况下调节第二反射镜驱动单元25B,使得第二像稳定单元16B的第三光学单元19B通过围绕第三旋转轴线22B旋转而接近第三额定位置;
(iv)当第二像稳定单元16B的第四光学单元20B的第四实际位置与第二像稳定单元16B的第四光学单元20B的第四额定位置不同时,在使用第一控制和/或调节单元27A的情况下调节第二棱镜驱动单元26B,使得第二像稳定单元16B的第四光学单元20B通过围绕第四旋转轴线23B旋转而接近第四额定位置。
在方法步骤S5之后,再次进行方法步骤S3至S5,直至在方法步骤S4中确定,相应的额定位置与对应的实际位置相对应或者足够准确地相对应,即例如直至第一像稳定单元16A的第一光学单元19A的第一实际位置与第一像稳定单元16A的第一光学单元19A的第一额定位置相对应或者足够准确地相对应。
在进一步检测双筒望远镜1的其他运动时,该方法从方法步骤S1起重新进行。
在本说明书中、附图中以及在权利要求书中公开的本发明特征单独地以及以任意组合对于以其不同实施方式实现本发明而言是重要的。本发明并不受限于所说明的实施方式。本发明可以在权利要求书的范围内并且在考虑到相关领域技术人员的知识的情况下改变。
附图标记清单
1 双筒望远镜
2 第一壳体
3 第二壳体
4 弯桥
5 第一铰接件
6 第二铰接件
7 第一接纳件
8 第二接纳件
9 第三接纳件
10 第一光轴
11 第二光轴
12 第一光学子系统
13 第二光学子系统
14A 第一物镜
14B 第二物镜
15A 第一只眼睛
15B 第二只眼睛
16A 第一像稳定单元
16B 第二像稳定单元
17A 第一目镜
17B 第二目镜
19A 第一光学单元
19B 第三光学单元
20A 第二光学单元
20B 第四光学单元
21A 第一镜面
21B 第二镜面
22A 第一旋转轴线
22B 第三旋转轴线
23A 第二旋转轴线
23B 第四旋转轴线
24A 具有视场光阑的第一中间像平面
24B 具有视场光阑的第二中间像平面
25A 第一反射镜驱动单元
25B 第二反射镜驱动单元
26A 第一棱镜驱动单元
26B 第二棱镜驱动单元
27 运动检测器
27A 第一控制和/或调节单元
27B 第二控制和/或调节单元
28 供电单元
28B 支架
29 弯桥传感器
29B 第二运动检测器
51A 第一正面单元
51B 第二正面单元
52A 第一聚焦单元
52B 第二聚焦单元
53 旋钮
54A 第一孔径光阑
54B 第二孔径光阑
55A 第一眼杯
55B 第二眼杯
74 铰接轴线
S1至S5 方法步骤
O 物体
- 用于使物体成像的光学系统以及用于操作光学系统的方法
- 用于对物体成像的光学系统和方法