一种道路施工用混凝土振动梁
文献发布时间:2023-06-19 12:21:13
技术领域
本申请涉及道路施工设备的领域,尤其是涉及一种道路施工用混凝土振动梁。
背景技术
在混凝土道路施工中,一般需要混凝土振动梁对路面的混凝土进行振动、整平。
授权公告号为CN211689776U的中国实用新型专利,公开了一种混凝土振动梁,包括梁主体,梁主体上设置有启振装置,梁主体两侧设有滚轮,滚轮通过滚轮架固定,滚轮架与升降杆连接,升降杆通过升降驱动装置驱动上下移动;梁主体两端设置有侧支撑框架,升降驱动装置设置在侧支撑框架上。
针对上述中的相关技术,在道路铺设混凝土时,由于施工情况复杂,道路的混凝土中有时会混有较大的石块,这石块可能是工作人员在工作时因误操作不小心放入的,也可能是被道路上其他的行驶车辆带入的,由于这些石块较大,石块混入混凝土后难以完全进入混凝土中,在铺设道路时可能会突出路面,启振装置难以将路面振平,使得混凝土路面的不平整。
发明内容
为了使混凝土路面平整,本申请提供一种道路施工用混凝土振动梁。
本申请提供的一种道路施工用混凝土振动梁采用如下的技术方案:
一种道路施工用混凝土振动梁,包括支撑架、用于带动支撑架移动的移动机构、设于支撑架上的振动机构、设于支撑架上的检测机构以及设于支撑架上的处理机构,所述振动机构包括用于将混凝土推平的推平杆以及用于振动混凝土的振动杆,所述推平杆与所述振动杆相互平行设置,所述检测机构设于所述推平杆与所述振动杆之间,所述检测机构包括与所述推平杆平行设置的弹性转动辊以及设于所述弹性转动辊上的多个触点传感器,所述处理机构包括警报器,所述触点传感器通过终端控制器与警报器电连接。
通过采用上述技术方案,振动梁使用时,移动机构带动支撑架移动,当混凝土内有石块时,弹性转动辊挤压混凝土内的石块,石块给予弹性转动辊反作用力,并使弹性转动辊发生形变,形变后的弹性转动辊与触点传感器相接触,触点传感器将信号传递给终端控制器,终端控制器作用于警报器,使警报器响起,然后工作人员检查混凝土路面,并将石块从路面的混凝土中取出,使路面通过振动机构振平。
可选的,所述处理机构还包括与推平杆平行设置的承载杆以及用于抓取异物的抓取件,所述抓取件包括滑移连接于所述承载杆上的移动块以及与所述移动块下端转动连接的转动臂,所述移动块转动连接有驱动所述转动臂上升或者下降的升降驱动件,所述转动臂的端部设置有铲子。
通过采用上述技术方案,当工作人员发现混凝土内的石块时,将移动块移动至与石块相对应的位置,然后通过升降驱动件带动转动臂下移,并通过铲子将石块铲出,最后再次通过升降驱动件带动转动臂上移,使铲子不影响振动梁的移动。
可选的,所述承载杆设置有驱动所述移动块移动的移动组件,所述移动组件包括与支撑架连接的驱动电机、与所述驱动电机传动连接的丝杆以及套设于所述丝杆并与丝杆螺纹连接的螺母块,所述驱动电机与控制终端电连接,所述丝杆与所述承载杆相平行,所述螺母块与所述移动块固定连接。
通过采用上述技术方案,当触点传感器检测到石块时,触点传感器给终端控制器传递信号,终端控制器作用于驱动电机,驱动电机启动并带动丝杆转动,使螺母块沿丝杆的延伸方向移动,直至螺母块移动至与触点传感器相对应的位置,此时移动块在螺母块的带动下也移动至与触点传感器对应的位置,使移动块自动移动至石块处。
可选的,所述丝杆远离所述驱动电机的端部套设有轴承座,所述轴承座与承载杆固定连接;所述承载杆设置有导向槽,所述移动块设置有于所述导向槽内滑移的导向块。
通过采用上述技术方案,通过轴承座使丝杆于承载杆上更加稳定;当移动块在承载杆上移动时,导向块在导向槽内滑移,通过导向块的导向作用,使移动块在承载杆上移动更加稳定。
可选的,所述移动块包括与所述移动块滑移连接的上部以及设置有所述转动臂的下部,所述下部与所述上部通过转动电机连接,所述转动电机固定连接于所述上部,所述下部与所述转动电机的输出轴传动连接,所述承载杆的端部连接有收集框,所述收集框具有供转动臂伸入的进料口。
通过采用上述技术方案,当铲子将石块铲起后,转动电机带动下部转动,使铲子朝向收集框,然后移动组件带动移动块向靠近收集框的方向移动,使铲子从进料口伸入收集框内,接着升降驱动件带动转动臂下移,使石块滑入收集框内,通过收集框将石块暂时收集起来,从而使抓取件还能继续铲出其他石块。
可选的,所述收集框内设置有用于冲洗所述铲子的喷头,所述喷头与水龙头连接。
通过采用上述技术方案,当铲子伸入收集框内后,将水龙头打开,喷头喷出的水冲击铲子,使石块更易从铲子上滑下,同时将铲子上的混凝土一同冲下,使铲子干净,方便下次使用。
可选的,所述收集框内设置有带有虑孔的过滤板,所述收集框于所述过滤板的下方形成收集腔,所述收集框连接有与收集腔相连通的排料管。
通过采用上述技术方案,当铲子上的石块和混凝土进入收集框内后,石块落在过滤板上,混凝土从过滤板的虑孔进入收集腔内,使混凝土暂时存放;并且收集框连接有排料管,通过排料管使收集腔内的混凝土排出,使混凝土重复利用。
可选的,所述振动梁还包括连接于所述支撑架上的平整机构,所述平整机构包括具有螺旋状叶片的螺旋杆、两个支撑块、竖直升降件以及转动驱动件,两个所述支撑块分别固定连接于螺旋杆的两端,所述螺旋杆与支撑块转动连接,所述支撑块竖直升降件与支撑架连接,所述转动驱动件与所述螺旋杆传动连接。
通过采用上述技术方案,当铲子将石块从路面的混凝土上铲出后,路面会形成一个空白区域,若是直接用振动辊振动路面后,路面仍旧会有凹陷,此时用平整机构重新平整路面;平整机构使用时,竖直升降件带动支撑块下移,使螺旋杆与混凝土相抵接,再启动转动驱动件,转动驱动件带动螺旋杆转动,使路面的混凝土重新混合。
可选的,所述螺旋杆的叶片于螺旋杆的中间分为两段,每段所述叶片均朝螺旋杆的中间螺旋设置。
通过采用上述技术方案,螺旋杆转动后,两段叶片均带动路面上的混凝土朝中间移动,使路面中间的混凝土较多,在路面铺设完成后,路面中间会略高于其中地方,当下雨或者路面上有水时,路面上的水会向两侧流动,使路面不容易积水。
综上所述,本申请包括以下至少一种有益技术效果:
1.通过抓取件铲出混凝土内的石块,使石块不影响路面的平整;
2.通过收集框将石块和混凝土均收集起来,使混凝土重新利用;
3.平整机构使用时,竖直升降件带动支撑块下移,使螺旋杆与混凝土相抵接,再启动转动驱动件,转动驱动件带动螺旋杆转动,使路面的混凝土重新混合。
附图说明
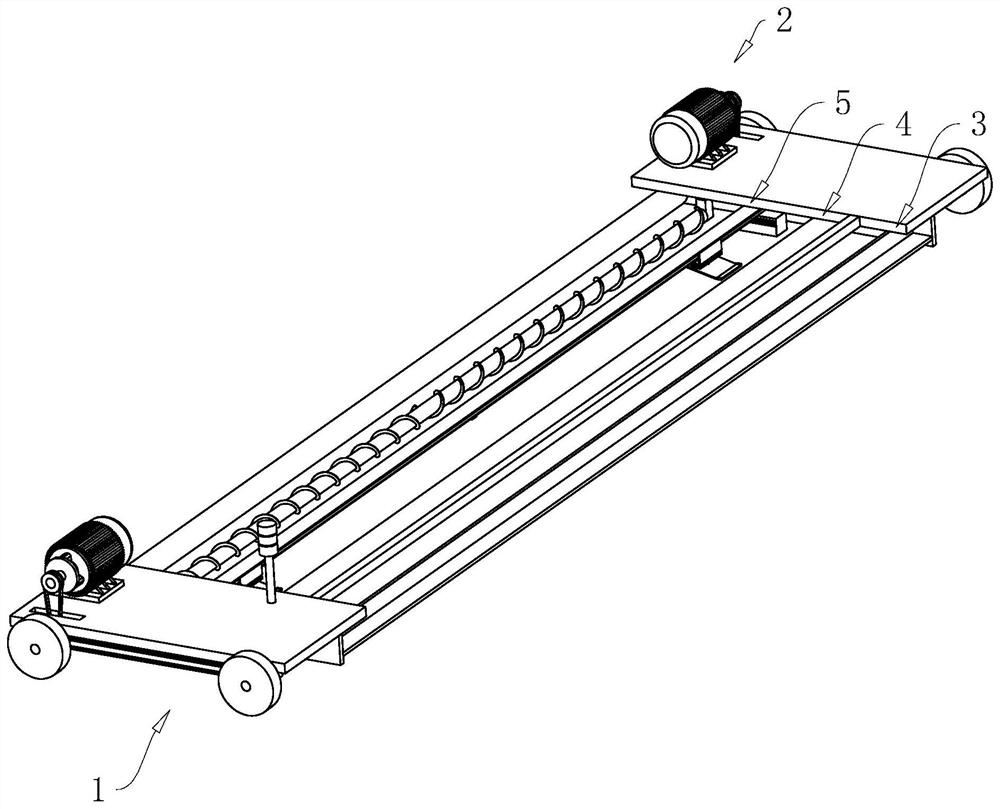
图1是本申请实施例的混凝土振动梁的整体结构示意图。
图2是本申请实施例的混凝土振动梁另一视角的整体结构示意图。
图3是本申请实施例的振动机构的结构示意图。
图4是本申请实施例的弹性转动辊的剖视图。
图5是本申请实施例的触点传感器于固定杆上的结构示意图。
图6是本申请实施例的固定杆的结构示意图。
图7是本申请实施例的承载杆的结构示意图。
图8是本申请实施例的上部与下部的爆炸图。
图9是本申请实施例的收集框的结构示意图。
图10是本申请实施例的平整机构的结构示意图。
图11是本申请实施例的螺旋杆于架体上的结构示意图。
附图标记说明:1、支撑架;11、架体;12、连接杆;2、移动机构;21、主动电机;22、滚轮;3、振动机构;31、推平杆;32、振动杆;33、振动电机;4、检测机构;41、弹性转动辊;42、触点传感器;43、固定杆;5、处理机构;51、警报器;52、承载杆;521、导向槽;53、抓取件;54、移动块;541、导向块;542、上部;543、下部;544、转动电机;55、转动臂;551、铲子;56、升降驱动件;57、移动组件;571、驱动电机;572、丝杆;573、螺母块;574、轴承座;58、收集框;581、进料口;582、过滤板;583、虑孔;584、收集腔;585、排料管;586、阀门;587、喷头;6、平整机构;61、螺旋杆;62、支撑块;63、竖直升降件;64、转动驱动件;65、叶片。
具体实施方式
以下结合附图1-11对本申请作进一步详细说明。
本申请实施例公开一种道路施工用混凝土振动梁。
参照图1,混凝土振动梁包括支撑架1、移动机构2、振动机构3、检测机构4以及处理机构5,移动机构2、振动机构3、检测机构4以及处理机构5均设于支撑架1上,移动机构2用于带动支撑架1移动,振动机构3用于平整并振动混凝土,检测机构4用于检测混凝土路面是否平整,处理机构5对不平整的路面进行处理。
参见图2,支撑架1包括两个相对设置的架体11以及用于连接两个架体11的连接杆12,连接杆12的两端分别与两个架体11连接。振动梁使用时,两个架体11分别位于路面的两侧。
移动机构2包括主动电机21与滚轮22,主动电机21设置有两个,两个主动电机21分别固定连接于架体11上,滚轮22转动连接于架体11的底部,两个架体11的底部均有滚轮22,使架体11通过滚轮22移动。主动电机21通过皮带与滚轮22传动连接,使主动电机21带动滚轮22转动。
参加图2与图3,振动机构3包括推平杆31与振动杆32,推平杆31的两端分别与两个架体11固定连接,使架体11移动时带动推平杆31一同移动。振动杆32的两端分别与两个架体11转动连接,振动杆32的两端均连接有振动电机33,振动电机33固定连接于架体11上,振动电机33的输出轴与振动杆32固定连接,使振动电机33带动振动杆32振动。
振动梁使用时,预先将混凝土倾倒在道路上,移动机构2带动支撑架1移动,推平杆31先与路面上的混凝土相抵接,将路面上的混凝土推平,再使振动杆32与推平后的混凝土相抵接,同时启动振动电机33,通过振动电机33带动振动杆32振动,从而使得振动杆32将道路上的混凝土压实。
参见图3与图4,在道路铺设混凝土时,由于施工情况复杂,道路的混凝土中有时会混有较大的石块,通过检测机构4检测出石块并通过处理机构5清理石块。检测机构4位于推平杆31与振动杆32之间,检测机构4包括弹性转动辊41与触点传感器42,弹性转动辊41为橡胶材质制成,弹性转动辊41的内部中空,触点传感器42位于弹性转动辊41的内部。
弹性转动辊41的两端分别与两个架体11转动连接,弹性转动辊41的水平高度低于推平杆31的高度,使得振动梁使用时弹性转动辊41能够与路面上的混凝土相抵接,并挤压混凝土,从而使得弹性转动辊41通过摩擦力在架体11上转动。
参见图4与图5,弹性转动辊41内同轴穿设有固定杆43,固定杆43的两端分别与架体11固定连接,使得固定杆43不随弹性转动辊41一同转动。触点传感器42固定连接于固定杆43的下方,且触点传感器42设置有多个,多个触点传感器42沿固定杆43的延伸方向间隔设置,触点传感器42与弹性转动辊41的内侧壁具有间隙,使常态下弹性转动辊41无法触发触点传感器42。
振动梁使用时,弹性转动辊41挤压混凝土,当混凝土内有较大的石块时,弹性转动辊41与石块相抵接,当石块的厚度大于道路的厚度时,弹性转动辊41较难将石块下压,石块给予弹性转动辊41反作用力,使弹性转动辊41受力后内凹,内凹的弹性转动辊41作用于触点传感器42上,使触点传感器42接收到信号。
参见图3,处理机构5包括警报器51,警报器51固定连接于架体11上,且警报器51通过终端控制器与触点传感器42连接。当触点传感器42接收到信号后,信号传递给终端控制器,终端控制器给警报器51发出指令,警报器51响起提醒工作人员。
参见图6,处理机构5还包括承载杆52与抓取件53,承载杆52的两端分别与两个架体11固定连接,抓取件53滑移连接于承载杆52上,抓取件53用于将混凝土中的石块取出。抓取件53可以是一个,也可以是两个,也可以是三个,本实施例中抓取件53设置有两个,承载杆52以中间为分界线分为两部分,两个抓取件53分别在位于两部分上。
参见图6与图7,抓取件53包括移动块54与转动臂55,移动块54与承载杆52滑移连接,且移动块54位于承载杆52的下方,转动臂55与移动块54远离承载杆52的一侧转动连接,也即是转动臂55位于移动块54的下端。转动臂55远离移动块54的端部固定连接有铲子551,铲子551朝向弹性转动辊41设置。
移动块54转动连接有升降驱动件56,升降驱动件56可以是气缸,也可以是液压缸,升降驱动件56的活塞杆与转动臂55转动连接,使升降驱动件56能带动转动臂55上升或者下降。
承载杆52设置有移动组件57,移动组件57也设置有两个,两个移动组件57与两个抓取件53相对应。移动组件57包括驱动电机571、丝杆572以及螺母块573,驱动电机571固定连接于架体11上,驱动电机571与终端控制器电连接,丝杆572位于承载杆52的下方,丝杆572与承载杆52相平行,且驱动电机571的输出轴与丝杆572的一端固定连接,使驱动电机571带动丝杆572转动。螺母块573套设于丝杆572上,螺母块573与丝杆572通过螺纹连接,螺母块573与移动块54固定连接,螺母块573与承载杆52的下侧滑移连接,使丝杆572转动时带动螺母块573在承载杆52上沿丝杆572的长度方向滑移。
为使丝杆572于承载杆52上稳定,承载杆52上固定连接有轴承座574,丝杆572远离驱动电机571的一端穿设于轴承座574内。为使移动块54于承载杆52上移动稳定,移动块54设置有导向块541,承载杆52开设有导向槽521,导向槽521沿承载杆52的长度方向延伸,并且导向槽521与承载杆52的两端面均贯通,通过导向块541在导向槽521内滑移,使移动块54沿承载杆52的延伸方向移动更加顺畅。
当触点传感器42检测到信号时,信号传递给终端控制器,终端控制器给驱动电机571传递信号,驱动电机571开启,驱动电机571带动丝杆572转动,丝杆572带动螺母块573移动,螺母块573带动移动块54在承载杆52上滑移,使移动块54滑移至与被作用的触点传感器42相对应的位置;然后升降驱动件56动作,升降驱动件56的活塞杆伸出,升降驱动件56带动转动臂55向下转动,使铲子551与混凝土相抵接并对准石块,由于振动梁在移动机构2的带动下一直在移动,使铲子551朝石块移动并将石块铲出;最后,升降驱动件56再次启动,升降驱动件56将铲子551抬起。
承载杆52的两端均固定连接有收集框58,两个收集框58与两个抓取件53一一对应,收集框58内部中空,收集框58开设有进料口581,进料口581与移动块54相对应,铲子551将石块铲起后将石块放入收集框58内,使石块暂时存放在收集框58内。
参见图8,为使铲子551能够放入收集框58内,移动块54具有能使铲子551转动并使铲子551朝向进料口581的结构。移动块54包括上部542和下部543,上部542与螺母块573固定连接,导向块541也设置于上部542,转动臂55连接于下部543。上部542远离承载杆52的侧面固定连接有转动电机544,转动电机544的输出轴与下部543靠近上部542的侧面固定连接,使转动电机544带动下部543转动。
当铲子551的石块需要清理时,启动转动电机544,下部543与上部542发生相对转动,使铲子551朝向收集框58的进料口581,然后启动驱动电机571,驱动电机571带动丝杆572转动,丝杆572带动螺母块573移动,螺母块573带动上部542移动,上部542带动下部543,使转动臂55朝靠近收集框58的方向移动,直至铲子551从进料口581伸入收集框58内,接着启动升降驱动件56,升降驱动件56带动转动臂55下降,使铲子551上的石块滑入收集框58内。
参见图9,铲子551在从混凝土中铲出石块时,会将部分混凝土一同铲出,为使铲子551上的混凝土一同掉落至收集框58内,收集框58内设置有若干喷头587,喷头587与自来水龙头连接,并且喷头587均朝向进料口581设置。当铲子551进入收集框58中,将喷头587开启,喷头587将水喷到铲子551上,使铲子551上的混凝土被冲到收集框58中。
收集框58内设置有带有虑孔583的过滤板582,虑孔583孔径根据实际情况设置,虑孔583能够挡住石块而使混凝土通过,收集框58于过滤板582的下方形成收集腔584,收集框58连接有与收集腔584相连通的排料管585,排料管585上设置有控制排料管585开关的阀门586。当铲子551上的石块和混凝土被水冲下时,石块掉落至过滤板582上,混凝土顺着虑孔583进入收集腔584内;当收集腔584内的混凝土需要排除时,打开阀门586,收集腔584内的混凝土从排料管585排出,使混凝土重新利用。
参见图10与图11,当抓取件53将石块铲出时,会在原先平整的混凝土路面上铲出空白区域,为此振动梁还包括连接于支撑架1上的平整机构6,平整机构6设于承载杆52和振动杆32之间,平整机构6包括螺旋杆61、支撑块62、竖直升降件63以及转动驱动件64,螺旋杆61与振动杆32相平行,螺旋杆61的外侧壁设置有螺旋状的叶片65,支撑块62设置有两个,两个支撑块62分别位于螺旋杆61的两端,螺旋杆61的两端分别转动穿设于两个支撑块62上。
两个支撑块62均通过竖直升降件63分别与两个架体11固定连接,竖直升降件63可以是气缸,也可以是液压缸,通过竖直升降件63带动两个支撑块62升降,从而带动螺旋杆61升降。
转动驱动件64为电机,转动驱动件64固定连接于支撑块62上,转动驱动件64的输出轴与螺旋杆61固定连接,使转动驱动件64带动螺旋杆61转动。
常套下,螺旋杆61的水平高度高于混凝土,使螺旋杆61不与混凝土相抵接,当抓取件53使用后,竖直升降件63带动螺旋杆61下降,使螺旋杆61与混凝土相抵接,然后启动转动驱动件64,通过转动驱动件64带动螺旋杆61转动,使螺旋杆61的叶片65翻动混凝土,填补被抓取件53铲出的空白区域。
值得注意的是,螺旋杆61的叶片65从中间分为两段,每段叶片65均朝螺旋杆61的中间螺旋设置,当螺旋杆61使用时,螺旋杆61的两段叶片65均带动路面上的混凝土朝中间移动,使路面中间的混凝土较多,在路面铺设完成后,路面中间会略高于其中地方,当下雨或者路面上有水时,路面上的水会向两侧流动,使路面不容易积水。
本申请实施例一种道路施工用混凝土振动梁的实施原理为:振动梁使用时,移动机构2带动支撑架1移动,平整杆先与路面上的混凝土抵接,通过平整杆将混凝土整平,然后弹性转动辊41挤压混凝土,将混凝土压实,当检测到混凝土内有石块时,通过抓取件53将石块铲出并放入收集框58中,随后启动竖直升降件63和转动驱动件64,螺旋杆61重新翻动混凝土,最后通过振动杆32为路面混凝土振动。
以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
- 一种道路施工用混凝土振动梁
- 一种用于道路施工混凝土振动抹平装置