一种新型智能分类垃圾箱及其工作方法
文献发布时间:2023-06-19 12:21:13
技术领域
本发明涉及视觉识别、人工智能、电子技术领域,特别是一种新型智能分类垃圾箱及其工作方法。
背景技术
人们在生产生活中不可避免的会产生垃圾,而垃圾处理也是人们日益头疼的问题,尤其对于人口密集的大城市,垃圾处理更是如此。目前,对于垃圾处理常见的是两种方式:焚烧和填埋。其中焚烧会带来环境污染的问题,目前国家对控制污染治理相当严格,此方式将会逐渐减少。而垃圾填埋的方式,随着垃圾不断地填埋,垃圾处理的空间会越来越小。因此,大多的城市,尤其是人口密集性大的一线城市,不断的在研究减少垃圾产生,如何实现垃圾回收利用的方案。
目前市面上缺少对不同垃圾进行分类管理的垃圾箱,同时对于一些摆放垃圾分类的垃圾箱,大家也不会按照不同的垃圾箱放对应的垃圾。
因此,我们需要一种新型智能分类垃圾箱,从技术上解决无法有效分类垃圾的社会问题。
发明内容
有鉴于此,本发明的目的是提供一种新型智能分类垃圾箱及其工作方法,可以实现垃圾自动分类投放和手动投放两种方式。
本发明采用以下方案实现:一种新型智能分类垃圾箱,包括一矩形箱体及设置在其内部的三个区域;所述三个区域从上至下依次为垃圾箱供电区、垃圾识别区和垃圾存储区;所述垃圾存储区包括五个相同形状大小的垃圾桶,从左至右依次为可回收物垃圾桶、其他垃圾垃圾桶、厨余垃圾垃圾桶、有害垃圾垃圾桶和未识别物垃圾桶;所述五个子垃圾桶中的每个垃圾桶上都设置有独立的上盖;所述垃圾箱供电区包括倾斜状态设置在箱体上方的太阳能板和电源模块,所述电源模块获取太阳能板的电能,将其转化为各区域所需的电压值;所述垃圾识别区包括前后左右四个挡板、两个摄像头、托盘、重力传感器、电机、滑动导轨和主控制模块;所述摄像头、重力传感器、电机、和主控制模块均与所述电源模块连接;所述四个挡板将垃圾识别区围成一矩形区域,左右两侧挡板中上方各固定一摄像头,用以拍摄垃圾图片;所述前后两侧挡板底部设置有导轨槽;所述托盘设置在垃圾识别区底部的中间位置,用以存放垃圾;所述重力传感器设置在托盘内;所述电机与分别与五个子垃圾桶和所述托盘连接,用以带动托盘在滑动导轨上滑动,并控制垃圾桶上方的盖子打开;所述滑动轨道固定在垃圾识别区和垃圾存储区的交界处;所述主控制模块与所述重力传感器连接,用以利用重力传感器检测托盘上垃圾重量,并将重量值反馈给主控制模块,通过阈值比较检测托盘上是否有垃圾;所述主控制模块还分别与所述电机和两个摄像头连接,用以对两个摄像头采集的垃圾图片信息进行识别分类,并控制电机将识别的垃圾投放到对应的垃圾桶中。
进一步地,所述托盘包括外框架、内托板和旋转杆;旋转杆两端嵌在外框架内,内托板与旋转杆中间部分固定连接;外框架和内托板之间留有空隙,两者通过旋转杆连接;旋转杆一端与电机相连,旋转杆转动时带动内托板转动;待机状态下,旋转杆将内托板锁定在水平方向,能够托放待识别的垃圾;托盘的外框架嵌在前后两侧挡板底部的导轨槽内,在电机的驱动下托盘能够沿着导轨左右滑动,同时托盘的内托板上装有重力传感器,用于检测托盘上是否放有垃圾。
进一步地,所述主控制模块包括图像识别单元、电机控制单元和主控制板;所述主控制板与所述重力传感器连接,用以利用重力传感器检测托盘上垃圾重量,并将重量值反馈给主控制板,通过阈值比较检测托盘上是否有垃圾;所述主控制板分别与所述图像识别单元和电机控制单元连接,所述图像识别单元与左右挡板的摄像头通信相连,用以控制摄像头拍照并接收摄像头拍摄的垃圾图片,并传输到主控制板并依次进行图片预处理、特征提取和选择、分类决策最后得到该垃圾的类型,得到分类结果;所述电机控制单元与所述电机连接,主控制板根据得到的分类结果,控制所述电机控制单元进而控制电机将相应垃圾桶上方的盖子打开,然后控制托盘滑动到相应垃圾桶的上方,最后操作托盘的旋转杆,将托板旋转至垂直状态,将垃圾丢进下方的垃圾桶。
进一步地,所述五个垃圾桶分别标注五种垃圾类别的名称、图案、垃圾的基本类型和常见物品,并且使用五种颜色进行区分,用以方便使用者进行手动投放;每个垃圾桶上方都有各自独立的盖子,在没有垃圾投放时,保持关闭的状态,用以减少垃圾异味的释放;有垃圾投放时,在电机驱动下以滑动的方式打开,垃圾投放完毕后,滑动关闭;同时每个垃圾桶外侧上方都设置有手动投放口,投放口盖子上方固定悬挂在垃圾桶上,平时垂直落下,保证垃圾桶为封闭状态;当手动投放垃圾时,将投放口盖子推向垃圾桶内侧即将垃圾丢到垃圾桶;投放结束后,投放口盖子垂直落下,将垃圾桶手动投放口闭合。
进一步地,本发明还提供一种基于新型智能分类垃圾箱的工作方法,包括以下步骤:
步骤S1:判断使用者是否明确投放垃圾的种类;若使用者明确投放垃圾的种类则执行步骤S2,否则执行步骤S3;
步骤S2:使用者明确投放垃圾的种类,则使用手动投放的方式;根据垃圾的种类,选择对应的垃圾桶,将投放口盖子推向垃圾桶内侧即将垃圾丢到垃圾桶,投放结束后,投放口盖子自然垂落,将垃圾桶手动投放口闭合;
步骤S3:使用者不明确投放的垃圾种类,则使用自动分类投放方式;将待投放垃圾放置在垃圾识别区的托盘上,托盘上的重力传感器会对垃圾重量进行测量,并将测量值发送给主控制板,主控制板将测量值与重量预设阈值进行比较,若垃圾重量超过预设值,则主控板产生垃圾识别信号;若垃圾重量小于预设值,则认为托盘上的物品为灰尘或其他异物,并非需要丢弃的垃圾,主控制板不产生垃圾识别信号;通过重量对垃圾进行识别,可以有效的避免垃圾桶不必要的识别操作。
步骤S4:主控制板将垃圾识别信号发送给图像识别单元,图像识别单元利用摄像头对托盘上垃圾左右拍照,并将垃圾图片发送给主控板的图像识别单元;摄像头在待机状态下为休眠状态,防止电量的浪费,只有接收到拍照请求后,才会启动摄像头进行拍照,拍照结束后,再次回到待机状态;
步骤S5:图像识别单元接收到垃圾图片后,首先通过主控制板进行图片预处理,主要包括去噪、平滑等操作,然后对图片的特征进行提取和选择,得到该次投放垃圾的重要特征,最后将提取的垃圾特征与本地的垃圾图片库(存储在图像识别单元内)进行比较,采用模板匹配法分析决策得到该垃圾的类型,并将分类结果发送给电机控制单元;
步骤S6:电机控制单元接收到垃圾分类结果后,首先控制电机将相应垃圾桶上方的盖子滑动到相邻垃圾桶上方(类似冰箱盖的结构),然后将堆放垃圾的托盘滑动到该垃圾桶上方,最后控制托盘的旋转杆,带动托板由水平位置转动至垂直方向,将垃圾投放到下方的垃圾桶;垃圾投放完成后,该类别垃圾桶上面的盖子滑动至垃圾桶上方,托板恢复到水平位置,托盘滑动至识别区中间位置,方便下次垃圾投放。
进一步地,步骤S5中所述对图片的特征进行提取和选择的具体内容为:采用多维尺度方法对图片中的颜色特征、形状特征和纹理特征进行提取,用以保证特征提取的完整性和有效性;但是在特征提取中所得到的特征对此次识别并非全部有效,需要提取有用的特征,即特征选择,采用粒子群优化算法对垃圾的特征进行选取。
与现有技术相比,本发明具有以下有益效果:
(1)本发明不需外部能源供应,自身的太阳能板即可满足自身需求,环保节能。
(2)本发明垃圾识别种类多达4类,可满足日常生活需要。
附图说明
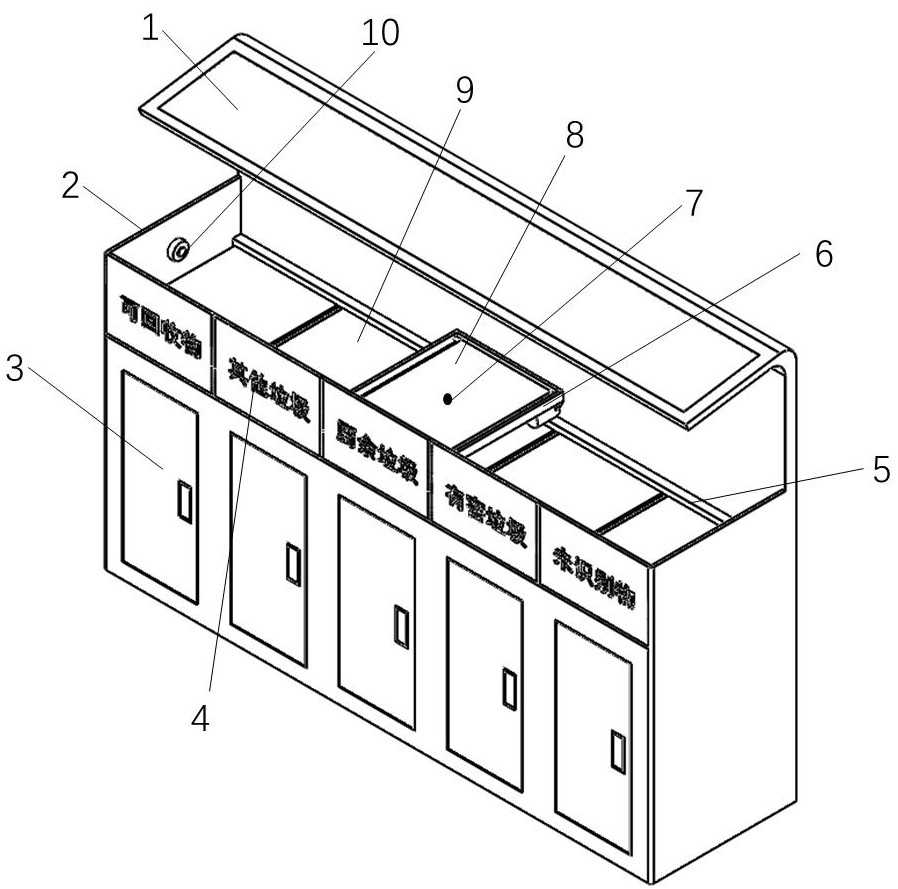
图1为本发明实施例的新型智能分类垃圾箱的结构图,其中,1为太阳能板,2为挡板2,3为垃圾桶3,4为垃圾桶手动投放口盖,5为滑动导轨,6为电机,7为重力传感器,8为托盘,9为垃圾桶上盖,10为摄像头。
图2为本发明实施例的新型智能分类垃圾箱的正视图。
图3为本发明实施例的托盘组成图,其中,8-1为外框架,8-2为旋转杆,8-3为内托板。
图4为本发明实施例的主控制板电路原理图。
图5为本发明实施例的电源模块电路原理图。
图6为本发明实施例的电机控制单元电路原理图。
图7为本发明实施例的图像识别单元电路原理图。
具体实施方式
下面结合附图及实施例对本发明做进一步说明。
应该指出,以下详细说明都是例示性的,旨在对本申请提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本申请所属技术领域的普通技术人员通常理解的相同含义。
需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本申请的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
如图1至7所示,本实施例提供一种新型智能分类垃圾箱,包括一矩形箱体及设置在其内部的三个区域;所述三个区域从上至下依次为垃圾箱供电区、垃圾识别区和垃圾存储区;所述垃圾存储区包括五个相同形状大小的垃圾桶3,从左至右依次为可回收物垃圾桶、其他垃圾垃圾桶、厨余垃圾垃圾桶、有害垃圾垃圾桶和未识别物垃圾桶;所述五个子垃圾桶中的每个垃圾桶上都设置有独立的上盖;所述垃圾箱供电区包括倾斜状态设置在箱体上方的太阳能板1和电源模块,所述电源模块获取太阳能板的电能,将其转化为各区域所需的电压值;所述垃圾识别区包括前后左右四个挡板2、两个摄像头10、托盘8、重力传感器7、电机6、滑动导轨5和和主控制模块;所述摄像头、重力传感器、电机、和主控制模块均与所述电源模块连接;所述四个挡板2将垃圾识别区围成一矩形区域,左右两侧挡板2中上方各固定一摄像头10,用以拍摄垃圾图片;所述前后两侧挡板2底部设置有导轨槽;所述托盘8设置在垃圾识别区底部的中间位置,用以存放垃圾;所述重力传感器7设置在托盘8内;所述电机6与分别与五个子垃圾桶和所述托盘8连接,用以带动托盘8在滑动导轨5上滑动,并控制垃圾桶上方的盖子打开;所述滑动轨道固定在垃圾识别区和垃圾存储区的交界处;所述主控制模块与所述重力传感器7连接,用以利用重力传感器7检测托盘8上垃圾重量,并将重量值反馈给主控制模块,通过阈值比较检测托盘8上是否有垃圾;所述主控制模块还分别与所述电机6和两个摄像头10连接,用以对两个摄像头10采集的垃圾图片信息进行识别分类,并控制电机6将识别的垃圾投放到对应的垃圾桶中。
在本实施例中,所述托盘8包括外框架8-1、内托板8-3和旋转杆8-2;旋转杆8-2两端嵌在外框架8-1内,内托板8-3与旋转杆8-2中间部分固定连接;外框架8-1和内托板8-3之间留有空隙,两者通过旋转杆8-2连接;旋转杆8-2一端与电机6相连,旋转杆8-2转动时带动内托板8-3转动;待机状态下,旋转杆8-2将内托板8-3锁定在水平方向,能够托放待识别的垃圾;托盘8的外框架8-1嵌在前后两侧挡板2底部的导轨槽内,在电机6的驱动下托盘8能够沿着导轨左右滑动,同时托盘8的内托板8-3上装有重力传感器7,用于检测托盘8上是否放有垃圾。
在本实施例中,所述主控板包括图像识别单元和电机控制单元;所述主控制模块包括图像识别单元、电机控制单元和主控制板;所述主控制板与所述重力传感器连接,用以利用重力传感器检测托盘上垃圾重量,并将重量值反馈给主控制板,通过阈值比较检测托盘上是否有垃圾;所述主控制板分别与所述图像识别单元和电机控制单元连接,所述图像识别单元与左右挡板2的摄像头10通信相连,用以控制摄像头10拍照并接收摄像头10拍摄的垃圾图片,并传输到主控制板并依次进行图片预处理、特征提取和选择、分类决策最后得到该垃圾的类型,得到分类结果;所述电机控制单元与所述电机6连接,主控制板根据得到的分类结果,控制所述电机控制单元进而控制电机6将相应垃圾桶上方的盖子打开,然后控制托盘8滑动到相应垃圾桶的上方,最后操作托盘8的旋转杆8-2,将托板旋转至垂直状态,将垃圾丢进下方的垃圾桶。
在本实施例中,所述五个垃圾桶分别标注五种垃圾类别的名称、图案、垃圾的基本类型和常见物品,并且使用五种颜色进行区分,方便使用者进行手动投放;每个垃圾桶上方都有各自独立的盖子,在没有垃圾投放时,保持关闭的状态,用以减少垃圾异味的释放;有垃圾投放时,在电机6驱动下以滑动的方式打开,垃圾投放完毕后,滑动关闭;(电机6的作用有两个:1.沿着滑动轨道移动托盘8;2.当托盘8移动到目标位置后,电机6会将垃圾桶上方的盖子滑动打开。)同时每个垃圾桶外侧上方都设置有手动投放口,投放口盖子上方固定悬挂在垃圾桶上,平时垂直落下,保证垃圾桶为封闭状态;当手动投放垃圾时,将投放口盖子推向垃圾桶内侧即将垃圾丢到垃圾桶;投放结束后,投放口盖子垂直落下,将垃圾桶手动投放口闭合。
较佳的,本实施例还提供一种基于新型智能分类垃圾箱的工作方法,包括以下步骤:
步骤S1:判断使用者是否明确投放垃圾的种类;若使用者明确投放垃圾的种类则执行步骤S2,否则执行步骤S3;
步骤S2:使用者明确投放垃圾的种类,则使用手动投放的方式;根据垃圾的种类,选择对应的垃圾桶,将投放口盖子推向垃圾桶内侧即可将垃圾丢到垃圾桶,投放结束后,投放口盖子自然垂落,将垃圾桶手动投放口闭合;
步骤S3:使用者不明确投放的垃圾种类,则使用自动分类投放方式;将待投放垃圾放置在垃圾识别区的托盘8上,托盘8上的重力传感器7会对垃圾重量进行测量,并将测量值发送给主控制板,主控制板将测量值与重量预设阈值进行比较,若垃圾重量超过预设值,则主控板产生垃圾识别信号;若垃圾重量小于预设值,则认为托盘8上的物品为灰尘或其他异物,并非需要丢弃的垃圾,主控制板不产生垃圾识别信号;通过重量对垃圾进行识别,可以有效的避免垃圾桶不必要的识别操作。
步骤S4:主控制板将垃圾识别信号发送给图像识别单元,图像识别单元利用摄像头10对托盘8上垃圾左右拍照,并将垃圾图片发送给主控板的图像识别单元;摄像头10在待机状态下为休眠状态,防止电量的浪费,只有接收到拍照请求后,才会启动摄像头10进行拍照,拍照结束后,再次回到待机状态;
步骤S5:图像识别单元接收到垃圾图片后,首先通过主控制板进行图片预处理,主要包括去噪、平滑操作,然后对图片的特征进行提取和选择,得到该次投放垃圾的重要特征,最后将提取的垃圾特征与本地的垃圾图片库(存储在图像识别单元内)进行比较,采用模板匹配法分析决策得到该垃圾的类型,并将分类结果发送给电机6控制单元;
步骤S6:电机6控制单元接收到垃圾分类结果后,首先控制电机6将相应垃圾桶上方的盖子滑动到相邻垃圾桶上方(类似冰箱盖的结构),然后将堆放垃圾的托盘8滑动到该垃圾桶上方,最后控制托盘8的旋转杆8-2,带动托板由水平位置转动至垂直方向,将垃圾投放到下方的垃圾桶;垃圾投放完成后,该类别垃圾桶上面的盖子滑动至垃圾桶上方,托板恢复到水平位置,托盘8滑动至识别区中间位置,方便下次垃圾投放。
在本实施例中,步骤S5中所述对图片的特征进行提取和选择的具体内容为:采用多维尺度方法对图片中的颜色特征、形状特征和纹理特征进行提取,用以保证特征提取的完整性和有效性;但是在特征提取中所得到的特征对此次识别并非全部有效,需要提取有用的特征,即特征选择,采用粒子群优化算法对垃圾的特征进行选取。
在本实施例中,智能垃圾箱整体外观为长方体,大致可分为上中下三个区域:上层为垃圾箱供电区,中间层为垃圾识别区,下层为垃圾存储区。垃圾箱供电区主要包括一块大面积的太阳能板1。太阳能板1位于垃圾箱的最上方,整体呈倾斜状态。该设计一方面保证太阳能板1可以充分吸收太阳光,产生最多电能。另一方面可以有效的避免雨水或灰尘的堆积,减少垃圾识别区阳光直射,影响摄像头10拍摄垃圾图片。并尽可能的保持垃圾识别区的清洁,避免误识别的操作。太阳能板1与蓄电池相连,为摄像头10、重力传感器7、电机6和主控板供电。其中,1为太阳能板,2为挡板,3为垃圾桶(共有5个,图中仅标注1个),4为垃圾桶手动投放口盖(每个垃圾桶都有独立的上盖,图中仅标注1个),5为滑动导轨5,6为电机,7为重力传感器7,8为托盘8,9为垃圾桶上盖(每个垃圾桶都有独立的上盖,图中仅标注1个),10为摄像头10(左右各一个共两个,图中仅标注一个)。
垃圾识别区主要包括挡板2、摄像头10、托盘8、重力传感器7、滑动导轨5、电机6、主控板。该区域四周用挡板2包围,防止识别的垃圾过大,无法堆放到对应的垃圾桶。左右两侧挡板2的中间偏上位置各固定一颗摄像头10,摄像头10平时处于休眠状态,防止电量的浪费。
托盘8初始位置为垃圾识别区底部的中间位置,分为外框架8-1、内托板8-3、旋转杆8-2三部分。旋转杆8-2两端嵌在外框架8-1内,内托板8-3与旋转杆8-2中间部分固定连接。外框架8-1和内托板8-3之间留有空隙,两者通过旋转杆8-2连接,共同组成托盘8。
主控板主要包括图像识别单元和电机控制单元。图像识别单元用来识别垃圾图片,判断得到垃圾分类结果信息,并将分类结果信息发送给电机控制单元。较详细的,信息设备单元接收到摄像头10拍摄的垃圾图片,依次进行图片预处理、特征提取和选择、分类决策等步骤得到该垃圾的类型,并将分类结果发送给电机控制单元。电机控制单元根据得到的分类结果,依次进行如下操作:首先将相应垃圾桶上方的盖子打开,然后控制托盘8滑动到相应垃圾桶的上方,最后操作托盘8的旋转杆8-2,将托板旋转至垂直状态,将垃圾丢进下方的垃圾桶。
垃圾存储区主要包括5个垃圾桶,分别存储5个种类的垃圾:厨余垃圾、可回收物、有害垃圾、其他垃圾、未识别物。其中针对厨余垃圾、可回收物、有害垃圾和其他垃圾的定义,国家已有明确规定,此处不再赘述。未识别物为该垃圾桶未识别出种类的垃圾,统一投放至该垃圾桶,方便后期环卫工人进行手动分类处理。
该垃圾箱可以实现垃圾自动分类投放和手动投放两种方式;
手动投放方式:使用者明确投放垃圾的种类,可以使用手动投放的方式。根据垃圾的种类,选择对应的垃圾桶,将投放口盖子推向垃圾桶内侧即可将垃圾丢到垃圾桶,投放结束后,投放口盖子自然垂落,将垃圾桶手动投放口闭合。
自动分类投放:使用者不明确投放的垃圾种类,可以使用自动分类投放方式。
将待投放垃圾放置在垃圾识别区的托盘8上,托盘8上的重力传感器7会对垃圾重量进行测量,并将测量值发送给主控板。主控板将测量值与重量预设阈值进行比较,若垃圾重量超过预设值,则主控板产生垃圾识别信号。若垃圾重量小于预设值,则认为托盘8上的物品可能为灰尘或其他异物,并非需要丢弃的垃圾,主控板不产生垃圾识别信号。通过重量对垃圾进行识别,可以有效的避免垃圾桶不必要的识别操作。
主控板将垃圾识别信号发送给摄像头10,摄像头10对托盘8上垃圾左右拍照,并将垃圾图片发送给主控板的图像识别单元。摄像头10在待机状态下为休眠状态,防止电量的浪费。只有接收到拍照请求后,才会启动摄像头10进行拍照,拍照结束后,再次回到待机状态;
图像识别单元接收到垃圾图片后,首先进行图片预处理,包括去噪、平滑操作,然后对图片的特征进行提取和选择,得到该次投放垃圾的重要特征,最后将提取的垃圾特征与本地的垃圾图片库(存储在图像识别单元内)进行比较,分析决策得到该垃圾的类型,并将分类结果发送给电机控制单元。
本地的垃圾图片库包含4个种类垃圾(除“未识别物”)的特性信息,在出厂时会涵盖各种类垃圾对应常见物品的基本特征信息。对于未识别出类别的垃圾,统一投放在“未分类物”垃圾桶。同时主控板会将未识别出的垃圾图片存储在本地的内存卡,技术人员需定期读取内存卡存储的图片,进行人工分类。并将该样本信息更新到本地的垃圾图片库,逐步提高垃圾识别的能力。
电机控制单元接收到垃圾分类结果后,首先控制电机6将相应垃圾桶上方的盖子滑动到相邻垃圾桶上方(类似冰箱盖的结构),然后将堆放垃圾的托盘8滑动到该垃圾桶上方,最后控制托盘8的旋转杆8-2,带动托板由水平位置转动至垂直方向,将垃圾投放到下方的垃圾桶。垃圾投放完成后,该类别垃圾桶上面的盖子滑动至垃圾桶上方,托板恢复到水平位置,托盘8滑动至识别区中间位置,方便下次垃圾投放。
图像识别单元的详细处理逻辑:
前期会收集各个种类垃圾的常见物品,组成数据量足够大的训练集。例如,厨余垃圾包括五谷杂粮、瓜果核皮、宠物饲料等;可回收垃圾包括废弃纸张、塑料容器、废弃金属等;有害垃圾包括废旧电池、废旧杀虫剂、过期药品等;其他垃圾包括一次性餐具、卫生纸、地毯等。从各类垃圾中选择合适的用来分类的图像特征,从训练集中提取特征。例如:对于图片中的拍摄到的透明物体,一般为塑料材质的产品,即可归类为可回收物,以此类推,得到其他各类垃圾的图片库特征信息,进而得到分类模型,即该单元的垃圾图片库。
图像识别单元接收到垃圾图片后,首先进行图片预处理,消除图像中无关的信息,恢复有用的真实信息,增强有关信息的可检测性、最大限度地简化数据,为后续的特征提取、图像分割、匹配和识别做准备。本单元在图片预处理阶段依次对图片进行灰度化、几何变换、图像增强处理,最大化得到图像的重要特征;
由于垃圾的颜色、形状等特征众多,所以需要对垃圾的多种特征进行提取,本单元采用多维尺度方法对图片中的颜色特征、形状特征、纹理特征进行提取,保证特征提取的完整性和有效性。但是在特征提取中所得到的特征也许对此次识别并非全部有效,需要提取有用的特征,即特征选择,本单元采用粒子群优化算法对垃圾的特征进行选取。
根据得到的垃圾特性信息,与本地的垃圾图片库作对比,判断待识别垃圾的类别。图像识别中常用的分类方法有统计法(或决策理论法)、句法(或结构)方法、神经网络法、模板匹配法。统计法基于严格的数学基础,而忽略了现实中图像特征的复杂程度、类别之多,实现难度较大。句法识别法模仿语言学中句法的层次结构,将复杂图像分解为单层或多层相对简单的子图像,但当存在较大的干扰和噪声时,该方法容易产生误判率,难以满足分类识别精度和可靠度的要求。神经网络法在实际使用中存在收敛速度慢、训练量大、训练时间长,且存在局部最小,识别分类精度不够,难以适用于经常出现新模式的场合,因而其实用性有待进一步提高。模板匹配法将已知物体的模板与图像中所有未知物体进行比较,如果某一未知物体与该模板匹配,则该物体被检测出来,并被认为是与模板同类的物体。模板匹配法实现简单方便,但是其需要较大数量的模板。考虑到日常生活中常见的垃圾物品相对固定,故在生成垃圾图片库时尽可能的包含大量垃圾特征信息,同时垃圾图片库还可更新升级。故采用模板匹配法进行垃圾分类。
较佳的,在本实施例中,主控制板采用STM32系列微控制器作为MCU,时钟源为8M有源晶振,并搭配去耦电容,以削弱外围器件和STM32芯片内部各模块对供电电压的影响,提供稳定电源。原理图如图4所示。
电源模块:该模块获取太阳能蓄电池的电能,将其转化为各部分电路所需的电压值。电源电路采用TPS733x系列线性稳压芯片,将输入的蓄电池电压转化为稳定3V,作为模拟电源和数字电源的基准电压。模拟电源为需要采集电压的ADC元器件供电,包括传感器元件;数字电源为各数字芯片供电。电路原理图如图5所示。
电机控制单元:采用BTS7970作为电极驱动芯片,该芯片提供一种保护高电流PWM电机驱动器的成本优化解决方案。在BTS7970的输出端和低线端串联了一个普通电容,起到滤波的作用。在BTS7970的电压输入端和地线端串联了一个电解电容,起到防止电流过大烧坏BTS7970芯片的作用。电路原理图如图6所示。
图像识别单元:采用CP2102作为USB转串口的芯片,获取摄像头拍摄的图片信息。CP2102是高度集成的USB至UART桥接控制器,可使用最少的组件和PCB面积完成所需功能。添加上拉电阻,以提高芯片抗扰度。VBUS引脚用来检测USB端口的,所以直接连接到USB端口。电路原理图如图7所示。
以上所述仅为本发明的较佳实施例,凡依本发明申请专利范围所做的均等变化与修饰,皆应属本发明的涵盖范围。
- 一种新型智能分类垃圾箱及其工作方法
- 一种新型智能分类垃圾箱