驻车制动器的锁定装置和驻车制动器
文献发布时间:2023-06-19 12:21:13
技术领域
本发明涉及一种驻车制动器的锁定装置和具有所述锁定装置的驻车制动器。
背景技术
从现有技术已知采用不同设计的驻车制动器。从现有技术已知的驻车制动器可以分为多类,例如干式驻车制动器,液压驻车制动器或手制动器。当机动车辆要长时间保持在一个位置时,总是操纵驻车制动器。尽管手制动器包括通过耦合装置与车轮或车轴的制动器连接的可机械操纵的杆,但是干式驻车制动器或液压驻车制动器主要被电控制。液压驻车制动器使用液压缸来停止车辆,其中,通常通过机动车辆的油路提供用于施加液压驻车制动器的液压。干式驻车制动器可以纯电动操作并且包括电动机,通过该电动机可以拉紧和再次释放对相应轮胎或相应车轴的制动。
为了确保驻车制动器随时充分制动机动车辆,必须尤其是在车辆静止时拉紧干式驻车制动器,以提供足够高的制动力,以便即使在参与构件的冷却状态下也提供足够高的制动力,从而使机动车辆保持在其位置处。
这种驻车制动器在过去已经受了考验,但是对于干式驻车制动器必须付出很大努力确保其不会意外打开。为此,尤其使用了锁定装置,这些锁定装置一方面证明是不可靠的且容易故障的,另一方面具有高的响应时间,由此尤其是延迟打开驻车制动器而继续行驶。
发明内容
在此提出本发明。
本发明的目的是提出一种改进的驻车制动器的锁定装置和改进的驻车制动器,该驻车制动器以符合目的的方式消除了从现有技术已知的驻车制动器的缺点并且实现了制动力的可靠保持。锁定装置和驻车制动器都应具有小巧紧凑的设计,可以完全电操纵,并且具有快速响应时间。
这些目的通过本发明的驻车制动器的锁定装置和具有所述锁定装置的驻车制动器来实现。
本发明的有利的改进方案在从属权利要求中给出。
根据本发明的特征的驻车制动器的锁定装置具有可绕旋转轴线移动的棘轮和至少两个棘爪,其中,所述棘爪可以接合到所述棘轮中以单侧闭锁或锁止所述棘轮。此外,根据本发明的锁定装置具有调节装置和耦合元件,其中,所述耦合元件将所述至少两个棘爪与所述调节装置耦合。另外规定的是,所述耦合元件可通过所述调节装置移动到第一位置和第二位置处,在所述第一位置处,所述至少两个棘爪允许所述棘轮沿第一旋转方向和第二旋转方向旋转,在所述第二位置处,所述至少两个棘爪可以接合到所述棘轮中并允许所述棘轮仅沿所述第一旋转方向旋转。
本发明基于的思想是,所述棘爪在所述耦合元件的所述第一位置处不能接合到所述棘轮中并因此从所述棘轮中被压出。然而,所述棘爪可以通过将所述耦合元件从所述第一位置切换到所述第二位置来转移以闭合所述驻车制动器。在所述耦合元件的所述第二位置处,仅实现所述棘轮绕旋转轴线的旋转以闭合或拉紧所述驻车制动器。通过将所述耦合元件重新切换到所述第一位置,可以再次解除所述棘轮的闭锁。
结合本发明,所述棘轮是具有齿部的小齿轮,所述齿部例如具有锯齿形的齿。所述棘轮可以具有多个齿,其中,所述齿可以优选地通过圆周绕旋转轴线以恒定的角度,即所谓的齿距角布置。所述棘轮的所述齿的数量可以是奇数或偶数。
此外,所述齿部可以如此设计,使得所述至少两个棘爪相对于所述棘轮的所述齿部的每个齿以不同的齿距角τ布置。例如,如果设置有两个棘爪,则所述两个棘爪中的一个可以偏移
根据本发明的另一个设计方案,所述至少两个棘爪围绕旋转轴线并且相对于所述棘轮如此布置,使得在所述耦合元件的所述第二位置处,当所述棘轮沿所述第一旋转方向旋转时,所述至少两个棘爪交替地接合到所述棘轮中并且被按压而脱离接合。通过将所述至少两个棘爪交替地接合到所述棘轮中而随时确保的是,所述棘轮沿所述第二旋转方向被锁止。尤其地,已证明有利的是,所述至少两个棘爪相对于所述棘轮的所述齿部以不同的齿距角布置。例如,所述棘爪相对于所述棘轮的任一齿偏移半个齿距布置,据此,所述至少两个棘爪中的一个始终接合在所述棘轮的两个齿之间,而所述至少两个棘爪中的另一个则脱离接合。在设置有两个以上的棘爪的情况下,多个棘爪可以同时冗余地接合到所述棘轮中和/或偏移齿距角的相应较小部分布置。因此,在设置有三个棘爪的情况下,这些棘爪可以相对于所述棘轮的所述齿部偏移齿距角的三分之一布置。
本发明的一个有利的设计方案规定的是,所述至少两个棘爪绕所述旋转轴线周向分布布置。尤其地,已证明有利的是,所述至少两个棘爪绕所述旋转轴线周向对称地分布布置,并且所述棘轮的所述齿的数量i为奇数。由此可以确保的是,在所述棘轮的每个角位置处(在所述耦合元件的所述第二位置处),所述至少两个棘爪中的至少一个接合在所述棘轮的两个齿之间。
根据本发明的另一个设计方案,所述至少两个棘爪分别可绕枢转轴线枢转,其中,优选地,所述相应的枢转轴线布置成平行于所述棘轮的所述旋转轴线并与所述旋转轴线隔开一定距离。
还已证明有利的是,设置有至少一个偏置件,通过所述偏置件将所述至少两个棘爪中的至少一个压靠所述棘轮。所述偏置件可以由复位弹簧实现,由此所述至少两个棘爪中的至少一个至少在所述耦合元件的所述第二位置处如此被偏置,使得可以克服弹簧力压出所述至少两个棘爪中的至少一个。因此,可以防止所述至少两个棘爪中的至少一个意外松开或意外压出而脱离接合。
根据上述设计方案中的一种设计方案的改进方案,所述至少两个棘爪中的至少一个和所述耦合元件可以通过引导鼻部和连杆引导件耦合,其中,所述引导鼻部接合到所述连杆引导件中。优选地,所述连杆引导件构成在所述耦合元件上,并且所述至少两个棘爪中的至少一个具有引导鼻部。所述连杆引导件可以如此设计,使得在所述耦合元件的第一位置处,所述至少两个棘爪从所述棘轮中强制引导地被压出,因此所述棘轮既能沿第一旋转方向旋转,又能沿第二旋转方向旋转。在所述耦合元件的第二位置处,所述至少两个棘爪可以接合到所述棘轮中。当所述棘轮沿第一旋转方向旋转时,所述至少两个棘爪中的一个类似棘轮地,优选地克服偏置件的弹簧力被按压而脱离接合,然后可以接合到沿旋转方向跟随的齿隙中。
本发明的一个优选设计方案规定的是,所述连杆引导件构成为L形并具有第一部段和第二部段,并且所述第一部段沿绕转方向绕旋转轴线布置,并且强制引导地预先确定所述引导鼻部沿径向方向相对于旋转轴线的相对位置。所述第二部段沿径向方向相对于旋转轴线布置,并且近似地沿径向方向实现所述引导鼻部的自由相对运动。
此外,已证明有利的是,所述耦合元件可绕所述旋转轴线旋转。所述耦合元件优选地与所述棘轮同轴地布置。
此外,已证明有利的是,所述耦合元件是环形。因此,所述耦合元件可以以同步环的方式将所述棘爪与所述调节单元耦合。尤其有利的是,所述耦合元件构成开环或闭环,通过所述开环或闭环将通过圆周分布的所述棘爪连接并且通过所述耦合元件实现所述棘爪的同步。
根据本发明的另一设计方案规定的是,所述调节装置是线性致动器。所述调节装置可以通过相应的连接装置,例如杠杆,与所述耦合元件连接,由此,所述调节装置的线性运动可以转换成所述耦合元件的运动,优选为旋转运动。
尤其是已证明有利的是,所述调节装置包括提升磁体,其中,优选地,所述提升磁体具有两个稳定的端部位置,并且所述提升磁体如此与所述耦合元件连接,使得所述提升磁体在所述耦合元件的所述第一位置和所述第二位置均保持在稳定的端部位置处。所述提升磁体实现所述锁定装置的特别快速的解锁和锁定,由此,所述锁定装置或所述驻车制动器可以无任何明显延迟地打开。因此,这种驻车制动器具有特别短的响应时间。
另外,所述耦合元件通过所述双稳态提升磁体永磁保持在所述第一位置和所述第二位置处,并且仅需通电来打开或解锁所述锁定装置。在无电流且无电压的状态下,所述锁定装置保持在打开或锁定状态。在发生故障的情况下,例如在电源中,所述锁定装置不会意外打开或关闭。
还可以有利的是,设置有位置固定件,所述位置固定件将所述耦合元件不仅固定在所述第一位置处,而且固定在所述第二位置处。所述位置固定件应防止所述耦合元件的位置的意外变化,并且可以例如包括弹簧保持的闭锁卡箍,所述闭锁卡箍当超过所述耦合元件上的预定的进给力或进给扭矩时从形状配合件被压出并释放所述耦合元件。在这里,可以有利的是,所述位置固定件将所述耦合元件固定在所述两个位置中的至少一个位置处,优选地在机动车辆的行驶操作中固定在第一位置处。
根据本发明的一个优选改进方案,可以设置有至少一个传感器,所述传感器可以检测所述棘轮是否被释放。尤其优选的是,所述至少一个传感器检测所述调节装置的位置和/或所述耦合元件的位置。另外,有利的是,所述至少一个传感器检测所述至少两个棘爪中的至少一个是否接合到所述棘轮中或释放所述棘轮。一个设计方案可以规定的是,所述至少两个棘爪由所述至少一个传感器彼此独立地监控,以便例如在所述棘轮沿所述第一方向旋转时可以分辨的是,沿所述第二方向的旋转被闭锁并且所述至少两个棘爪中的至少一个始终与所述棘轮接合。
所述至少一个传感器还可以包括感应、电容、光学和磁性传感器。尤其优选的是,所述磁性传感器包括一个或多个霍尔传感器。不仅所述耦合元件,而且所述至少两个棘爪中的至少一个都可以具有相应的装置,所述传感器可以通过所述装置来检测状态。例如,所述耦合元件和/或所述至少两个棘爪中的至少一个可以具有反射器、磁体等,所述传感器可以通过所述反射器、磁体等检测相应构件的位置变化。在本发明的一个优选设计方案中,既可以检测所述耦合元件的位置,又可以检测所述棘爪的位置,其中,不仅针对所述相应的棘爪,而且针对所述耦合元件设置有霍尔传感器,并且所述至少两个棘爪和所述耦合元件均具有永磁体。
本发明的另一有利设计方案规定的是,设置有壳体,并且所述至少两个棘爪和/或所述耦合元件支承地保持在所述壳体上。尤其优选的是,所述壳体是由两种不同材料制成的混合构件,其中,优选地,所述壳体由冲压的第一组件和第二组件组成,所述第一组件优选地由金属制成,所述第二组件优选地由塑料制成,由此可以节省成本并减轻重量。所述壳体可以集成制动执行器,由此可以提供紧凑的制动单元。
本发明的另一有利设计方案,所述至少一个传感器和/或所述调节装置的控制器布置在壳体侧。尤其优选的是,所述锁定装置具有接口,通过所述接口可以进行电能的供给和所述锁定装置的状态反馈。由此产生自闭式单元,并且所述锁定装置可以以模块化和预安装的方式安装在驻车制动器中。
本发明的另一方面涉及一种驻车制动器,其优选地仅是电动的,其具有操纵制动器的电动机和根据本发明的锁定装置。
所述驻车制动器的一个改进方案规定的是,设置有所述制动器的温度检测件。一旦机动车辆停车且制动器冷却,电动机就可以拉紧制动器并补偿热膨胀。
附图说明
下面参照附图详细描述根据本发明的驻车制动器的锁定装置的实施例。在附图中:
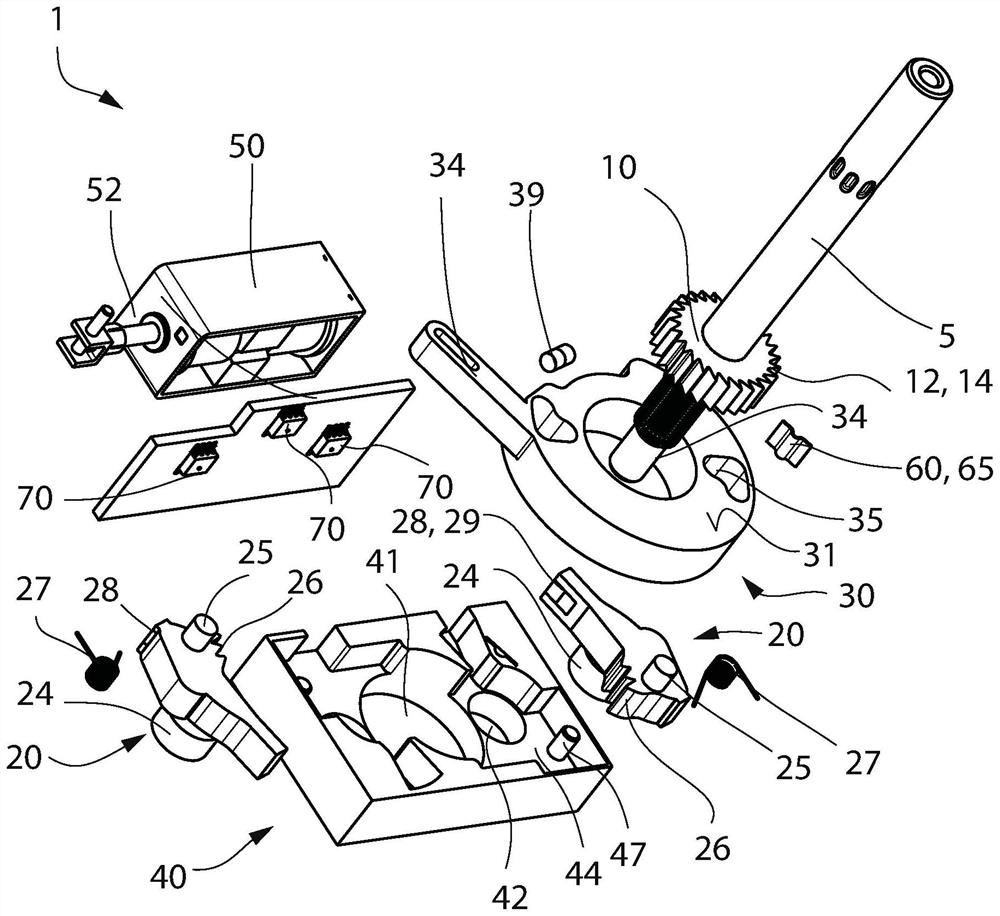
图1示出了根据本发明的锁定装置的大幅简化且示意性的分解图,该锁定装置具有棘轮、两个棘爪、耦合元件和调节装置;
图2示出了在第一位置处的根据图1的锁定装置的大幅简化且部分透明的图示,其中,棘爪允许棘轮沿第一旋转方向和第二旋转方向旋转;
图3示出了在第二位置处的根据图2的锁定装置的大幅简化且部分透明的图示,其中,棘爪允许棘轮仅沿第一旋转方向旋转;
图4示出了耦合元件的简化且示意性的俯视图;
图5a示出了至少两个棘爪中的一个的俯视图;
图5b示出了根据图5a的棘爪的侧视图;
图6a示出了壳体的第一壳体半部的简化的俯视图;以及
图6b示出了壳体的第二壳体半部的简化的俯视图。
具体实施方式
以下,在一个实施例中的相同或功能相同的构件由相同的附图标记标识。为了清楚起见,在各个附图中,并非所有相同或功能相同的部件都具有附图标记。
从根据图1的大幅简化的分解图可以看出根据本发明的锁定装置1。锁定装置1是机动车辆的驻车制动器(未完全示出)的组成部分,该驻车制动器设置成拉紧或松开对车轮或车轴的制动。
电动驻车制动器可以具有电动机(未示出),该电动机通过驱动轴5与制动器连接,其中,驱动轴5可以绕旋转轴线X沿第一旋转方向φ1旋转以拉紧制动器,而沿第二旋转方向φ2旋转以松开制动器。相应的旋转方向φ1和φ2在图2和图3中借助箭头线表示。
锁定装置1包括可绕旋转轴线X移动的棘轮10和至少两个棘爪20,该至少两个棘爪20可以接合到棘轮10中以固定或闭锁棘轮10。锁定装置1还包括耦合元件30和调节装置50,其中,耦合元件30将至少两个棘爪20与调节装置50耦合。
至少两个棘爪20和耦合元件30可以布置在壳体40中,其中,壳体40具有通孔41,驱动轴5通过该通孔41同轴地被引导。
棘轮10以小齿轮的方式配备有齿部12,该齿部12具有数量为i的齿14,其中,在所示的示例性实施例中,数量i为奇数,i=27。齿14构成为锯齿形,其中,齿14优选地沿绕转方向绕旋转轴线X以恒定角度,即所谓的齿距角τ布置。相应的齿14具有在齿顶中相交的齿面和齿背。在两个相邻的齿顶之间构成有所谓的齿隙。齿背指向第一旋转方向φ1,而齿面指向第二旋转方向φ2,由此,齿部12可以类似于锯齿而称为“强对接”齿类型,并且切削角度小于90°。换句话说,齿面构成底切。
棘轮10不可旋转地与驱动轴5耦合。
在当前情况下,两个棘爪20,优选构造相同的棘爪20围绕棘轮10或围绕旋转轴线X布置,这些棘爪20各自可绕枢转轴线X2枢转。相应的枢转轴线X2优选地平行于旋转轴线X布置并且与旋转轴线X相距一定距离。
在图5a和图5b中详细示出的棘爪20具有第一侧部21和第二侧部22,并且可以由金属材料制成,尤其是在丝网印刷工艺中。在第一侧部21上,轴承销24从棘爪20突出,并且在第二侧部22上,引导鼻部25从棘爪20突出,其中,轴承销24和引导鼻部25都构成为圆柱形。轴承销24的直径是引导鼻部25的直径的倍数。
如将在下面详细描述的那样,相应的棘爪20绕枢转轴线X2可旋转移动地被支撑在壳体40上,其中,棘爪20构成为摇杆状并具有第一端部区域和第二端部区域,该第一端部区域和该第二端部区域径向构成为从枢转轴线X2径向布置。在第一端部区域中,前述的引导鼻部25布置在第二侧部22上并且还布置有一个或多个棘齿26。棘齿26沿绕转方向绕枢转轴线X2突出并且适配于棘轮10的齿部12的齿14的形状。
不仅在第一端部区域中,而且在第二端部区域中,都可以构成在图5a和图5b中用虚线表示的凹穴28,这些凹穴28可以构成为收纳例如将在后面详细描述的传感器或磁体39。
在图4中详细示出的耦合元件30具有以同步环形式的基本环形的部段。在径向布置的侧部上,在环形部段中布置有具有第一部段36和第二部段37的L形的连杆引导件35。连杆引导件35可以作为槽被加工或模制到耦合元件30中,其中,连杆引导件35如此适配于相应的棘爪20的引导凸部25,使得引导鼻部25可以在连杆引导件35中被强制引导。
连接装置34以杆的形式从耦合元件30的环形部段突出。在连接装置34的自由端部的区域中,可以构成穿过连接装置34的细长孔。
此外,耦合元件30可以具有凹穴28,该凹穴28可以构成为收纳将在后面详细描述的传感器。耦合元件30还可以具有凹部33,将在后面详细描述的位置固定件60的闭锁卡箍65可以相对于旋转轴线X沿径向方向接合到该凹部33中。
壳体40可以一件式或由多个壳体半部40a、40b制成为混合构件,其中,在图6A中示出了第一壳体半部40a,并在图6B中示出了第二壳体半部40b。两个壳体半部40a、40b的共同点在于,它们具有通孔41,并且在内侧各自具有至少一个凹槽44、46。在根据图6a的第一壳体半部40a中,在径向侧部上绕旋转轴线X2布置有轴承销收纳部42,该轴承销收纳部42适配于棘爪20的轴承销24的尺寸。从图6A还可以看出,第一凹槽44绕轴承销收纳部42构成,其中,第一凹槽44构造成收纳棘爪20。凹槽44可以如此确定尺寸,使得相应的棘爪20的引导鼻部25突出。考虑到第一凹槽44的形状和尺寸,棘爪20可绕由轴承销收纳部42和轴承销24形成的枢转轴线X2枢转。此外,可以设置弹簧收纳部47,在这些弹簧收纳部47上各自可以紧固一个复位弹簧27。
根据图6b的第二壳体半部40b具有第二凹槽46,该第二凹槽46与通孔41近似同轴地构成并且适配于耦合元件30的环形部段。在第二凹槽46中,耦合元件30的环形部段可以与旋转轴线X同轴地被支承,由此,耦合元件30绕旋转轴线X可旋转地被支承保持在壳体40中。
壳体40可以在一侧上具有一个或多个传感器凹穴48,该一个或多个传感器凹穴48可以收纳传感器70。传感器凹穴48可以布置在第一壳体半部40a和/或第二壳体半部40b中,并且在图6a和图6b中用虚线示出。
此外,在图6b中示出位置固定件60,该位置固定件60包括弹簧张紧式锁定卡箍65,该弹簧张紧式锁定卡箍65设置成在第一位置A和/或第二位置B处接合到耦合元件30的凹部33中并锁止该耦合元件30。
调节装置50可以是任何驱动器,通过该驱动器可以将耦合元件30绕旋转轴线X从第一位置A调节到第二位置B。在所示的实施例中,调节装置50包括具有两个稳定的端部位置的提升磁体,该提升磁体的特征在于,柱塞52由调节装置50永磁保持在如图3所示的第一端部位置处和图2所示的第二端部位置处。柱塞52在自由端部处具有连接装置54,通过该连接装置54可以将进给运动传递给耦合元件30。当调节装置50通电时,永磁保持力在相应的端部位置处被释放,并且柱塞移动到相应的另一端部位置处。在这里,提升磁体实现了调节装置50的特别快速进给。
进一步参考图2和图3可以看出,调节装置50可以通过连接装置34、54和耦合元件30绕旋转轴线X从第一位置A旋转到第二位置B,反之亦然。在此处所示的锁定装置1的安装状态下,棘爪20的相应的引导鼻部25接合到耦合元件30的连杆引导件35中。
在根据图2的第一位置A处,棘爪20的引导鼻部25布置在连杆引导件35的第一部段36中。复位弹簧27使棘爪20沿棘轮10的方向偏置。引导鼻部25搁置在连杆引导件35上,并且棘爪20克服复位弹簧27的偏置而从棘轮10中被压出,因此棘齿26不能接合到棘轮10中。在耦合元件30的该第一位置A处,至少两个棘爪20释放棘轮10不仅沿第一旋转方向φ1而且沿第二旋转方向φ2的旋转。
在根据图3的第二位置B处,棘爪20的相应的引导鼻部25布置在连杆引导件35的第二部段37中。引导鼻部25在连杆引导件35的第二部段37中沿径向方向或绕枢转轴线X2可移动,并且相应的棘爪20可以通过复位弹簧27的相应的弹簧力被压入到棘轮10中,或者可以在沿第一旋转方向φ1旋转时通过在齿背上的压出而被压出。在第二位置B处,仅能够沿第一旋转方向φ1旋转,因此在第二位置B处通过空转能够例如拉紧驻车制动器。每当参与制动的组件在行驶后冷却且热膨胀减少时,总会需要拉紧驻车制动器。通过沿第二旋转方向φ2旋转来松开驻车制动器被阻止。
尤其地,从图3可以看出,至少两个棘爪20沿绕转方向绕旋转轴线X如此布置,使得这些棘爪20当棘轮10沿第一旋转方向φ1旋转时交替地被压入和被压出。为此,棘爪20相对于棘轮10的齿部12不是与齿部12对称地布置,而是偏移半个齿距角τ布置。通过棘爪20的这种布置可以确保的是,在耦合元件30的第二位置B处,棘爪20中的一个总是处于接合状态。
为了检测耦合元件30的位置,可以将磁体39插入到凹穴38中,该磁体39与传感器70相互作用,从而可以检测耦合元件30是处于第一位置A处还是处于第二位置B处。此外,磁体29可以插入到棘爪20的凹穴28中。从图2和图3可以看出,磁体29在图中左侧的第一端部区域中插入到棘爪20的凹穴28中。在图中的右侧,磁体29插入到棘爪的第二端部区域中的凹穴28中。因此,两个棘爪的磁体29指向相同的空间方向。
磁体29可以与另外的传感器70相互作用以检测棘爪20是否接合到棘轮10中。传感器70可以例如是霍尔传感器,其可以检测由相应的磁体29、39产生的磁场的变化。
为了实现简单且紧凑的设计,优选的是,传感器70布置在壳体侧。在该壳体侧,传感器70可以布置在电路板等上。在该电路板上可以设置控制器,其中,该控制器可以不仅控制调节装置50而且控制传感器70的数据。
附图标记说明:
1 锁定装置
5 驱动轴
10 棘轮
12 齿部
14 齿
20 棘爪
21 第一侧部
22 第二侧部
24 轴承销
25 引导鼻部
26 棘齿
27 复位弹簧
28 凹穴
29 磁体
30 耦合元件
31 第一侧部
32 第二侧部
33 凹部
34 连接装置
35 连杆引导件
36 第一部段
37 第二部段
38 凹穴
39 磁体
40 壳体
41 通孔
42 轴承销收纳部
44 第一凹槽
46 第二凹槽
47 弹簧收纳部
48 传感器凹穴
50 调节装置
52 柱塞
54 连接装置
55 提升磁体
60 位置固定件
65 闭锁卡箍
70 传感器
A 第一位置
B 第二位置
X 旋转轴线
X2 枢转轴线
τ 齿距角
φ1 第一旋转方向
φ2 第二旋转方向
- 驻车制动器的锁定装置和驻车制动器
- 调整驻车制动器间隙的安装装置、驻车制动器及矿用自卸车