全自动送菜装置及其控制方法
文献发布时间:2023-06-19 12:22:51
技术领域
本申请涉及自动送料的领域,尤其是涉及一种全自动送菜装置及其控制方法。
背景技术
中式菜肴具有品种丰富、口味多样的特点,每份菜肴都可能需要用到多种菜相互配合。对于中式菜肴的烹调来说,食材特性不同,所以需要在炒菜的不同时间节点内依次将菜投入到锅内,温度控制、投料时机等烹饪技巧法的合理运用是保证菜肴质量的关键因素。人工烹饪时,一般是通过厨师的经验来把控投入菜的时间节点,这样的方式存在菜投放时间把握不准确的问题,难以把控成品菜的质量,需要对此进行改进。
发明内容
为了解决菜肴品质难以把控的问题,本申请提供一种全自动送菜装置及其控制方法。
本申请提供一种全自动送菜装置,采用如下的技术方案:
一种全自动送菜装置,包括支撑架以及安装在支撑架上的置物板,所述支撑架上安装有驱动所述置物板自转的驱动件,所述置物板上放置有置料盒,置料盒与置物板活动连接,所述置物板上开设有若干通孔,所述通孔成周向分布在所述置物板上,所述通孔正对置料盒的底部,所述支撑架上开有避空孔,所述支撑架上安装有当通孔与所述避空孔对准时,推动置料盒以置料盒底部为支点进行翻转并复位的推动组件。
通过采用上述技术方案,在进行炒菜工作时,将不同的菜放置到不同的置料盒内,然后启动驱动件和推动组件,驱动件驱动置物板转动到通孔与避空孔正对的位置处,推动组件在通孔与避空孔正对时,推动置料盒翻转以使得置料盒内的菜掉落到炒锅内进行翻炒,推动组件在置料盒完成送菜后再次控制置料盒翻转以使得置料盒恢复原位,以便下次使用。通过驱动件和推动组件的相互配合,可以严格的把控各个食材投入到锅内的时间,有效提高菜品加工的精准度。置料盒与置物板活动连接,在更刚换或者是清洗置料盒时,可以将置料盒直接从置物板上取下,提高了送菜装置使用的便利性。
可选的,所述推动组件包括推杆和推动件,推动件与支撑架固定,推动件与推杆的一端固定连接以推动推杆的一端做圆周运动,推杆的另一端位于通孔内,置料盒的底部设置有滑槽,滑槽从置物板的侧边朝向中心位置方向延伸设置,滑槽的一端贯通,当通孔与避空孔对准时,推杆从滑槽的开口处伸进滑槽内并在推杆的持续转动中沿着滑槽滑动。
通过采用上述技术方案,推动件带动推杆运动,以使得推杆的一端伸入到滑槽内,置料盒在推杆的作用下开始转动,直到推杆与滑槽封闭的一端抵接,置料盒内的食材全部掉出,推动件继续驱动推杆做圆周转动,推杆开始对置料盒施加拉力,以拉动置料盒转动复位。通过设置滑槽配合推杆运动,以使得在置料盒翻转后可以复位,以实现送菜装置的反复运作。
可选的,所述推动件包括推力电机,所述推力电机固设于支撑架,所述推杆的端部固定连接有圆板,所述推杆与所述圆板的侧边固定连接,所述推力电机的转轴与所述圆板的中心固定连接。
通过采用上述技术方案,通过设置推力电机,以在推力电机转动时,驱动圆板转动,圆板在转动时带动推杆做圆周运动,以使得推杆在做圆周运动时,带动置料盒实现翻转送菜和翻转复位的动作。
可选的,所述推动件包括推力电机,所述推力电机固设于支撑架,所述推杆的端部固定连接有圆板,所述推杆与所述圆板的侧边固定连接,所述推力电机的转轴与所述圆板的中心固定连接。
通过采用上述技术方案,通过设置轴承以减小置料盒在翻转时的与推杆之间的摩擦力,进而减轻置料盒翻转时的抖动,使得置料盒上的食材可以准确的投入到锅内;通过设置横杆和限位槽,以提高置料盒在转动时的稳定性,以使得置料盒在翻转时,不易出现侧向倾倒的情况。
可选的,所述置物板的侧边朝向放置置料盒的方向设置有首尾闭合的凸边,所述置料盒靠近凸边一面设置有凸块,凸块上设置有朝向置料盒侧面倾斜的斜面,当置料盒倾斜时,凸块上的斜面与所述凸边抵接。
通过采用上述技术方案,通过在凸块上设置斜边,使得在置料盒翻转复位时凸块上的斜边与凸边抵接,斜边和凸边相互配合,以给置料盒翻转提供着力点,方便置料盒翻转复位。
可选的,所述置物板上位于所述置料盒底部安装有电磁铁,置料盒底部安装有磁石,磁石与电磁铁吸合固定。
通过采用上述技术方案,置料盒翻转复位时,可能会出现抖动的情况,以使得置料盒偏离原始位置,通过设置电磁铁和磁石相互配合,以使得在置料盒翻转复位时,令电磁铁通电,电磁铁对磁石产生单方向的吸力,电磁铁对置料盒定位,以使得翻转复位的置料盒可以放置在原始位置。
可选的,所述通孔靠近相邻通孔的侧边位置处均固定有限位块。
通过采用上述技术方案,通过设置限位块对置料盒进行限位,以使得置料盒在置物板上移动的过程中,不易出现水平方向移位的情况,提高了置料盒放置的稳定性。
可选的,所述通孔内安装有信号器,所述信号器与所述推力电机信号连接,当所述通孔与所述避空孔正对时,所述信号器向推力电机发送启动信号以启动推力电机。
通过采用上述技术方案,通过设置信号器,在通孔和避空孔正对时,推力电机刚好启动以推动推杆以使得置料盒翻转,以使得推杆不易出现与滑槽错位的情况。
第二方面,本申请提供一种全自动送菜装置的控制方法,采用如下的技术方案:
一种采用上述任一所述的全自动送菜装置的控制方法,包括步骤:
获取预设菜单并根据预设菜单确定炒菜步骤信息;
根据所述炒菜步骤信息向推力电机发送相对应的控制指令以控制对应置料盒翻转时间、向驱动件发送启动指令。
通过采用上述技术方案,通过从获取的菜谱中获取炒菜的步骤,以获取投放各食材的时间节点,进一步配合对驱动电机和推力电机的控制,以进一步把控各个材料的投料时间,以提高菜肴品质。
可选的,所述获取预设菜单并根据预设菜单确定炒菜步骤信息步骤,包括:
基于所述预设菜单获取若干置料盒中带粘性的食材特性以生成特性信息;
基于所述特性信息以获取带粘性食材置料盒的复位信息;
基于所述复位信息在置料盒复位至预设位置时,再次控制所述推力电机驱动置料盒翻转。
通过采用上述技术方案,带粘性的食材会粘在置料盒的内壁上,在置料盒第一次翻转时,置料盒内的食材无法完全掉入锅内,通过在置料盒复位时,控制推力电机再次驱动置料盒翻转,置料盒在推拉的过程中发生晃动,粘在置料盒上的食材在置料盒晃动的过程中掉落,减少了食材的浪费。
综上所述,本申请包括以下至少一种有益技术效果:
1.启动驱动件和推动组件,使得置物板在驱动件的驱动下转动到通孔与避空孔正对的位置处,推动组件在通孔与避空孔正对时,推动置料盒翻转以使得置料盒内的食材掉落到炒锅内进行翻炒,推动组件在置料盒内的食材掉落后再次控制置料盒翻转以使得置料盒恢复原位,以便下次使用。通过驱动件和推动组件的相互配合,可以严格的把控各个食材投入到锅内的时间,进而提高菜品加工的精准度;
2.推动件推动推杆运动,以使得推杆的一端伸入到滑槽内,置料盒在推杆的作用下开始转动,直到推杆与滑槽封闭的一端抵接,置料盒内的食材全部倒出,推动件继续驱动推杆做圆周转动,推杆开始对置料盒施加拉力,以拉动置料盒转动复位。通过设置滑槽配合推杆运动,以使得在置料盒翻转后可以复位,以实现送菜装置的反复运作。
3.通过在凸块上设置斜边,以使得在置料盒翻转复位时,凸块上的斜边与凸边抵接,斜边和凸边相互配合,以给置料盒翻转提供着力点,以方便置料盒翻转复位。
附图说明
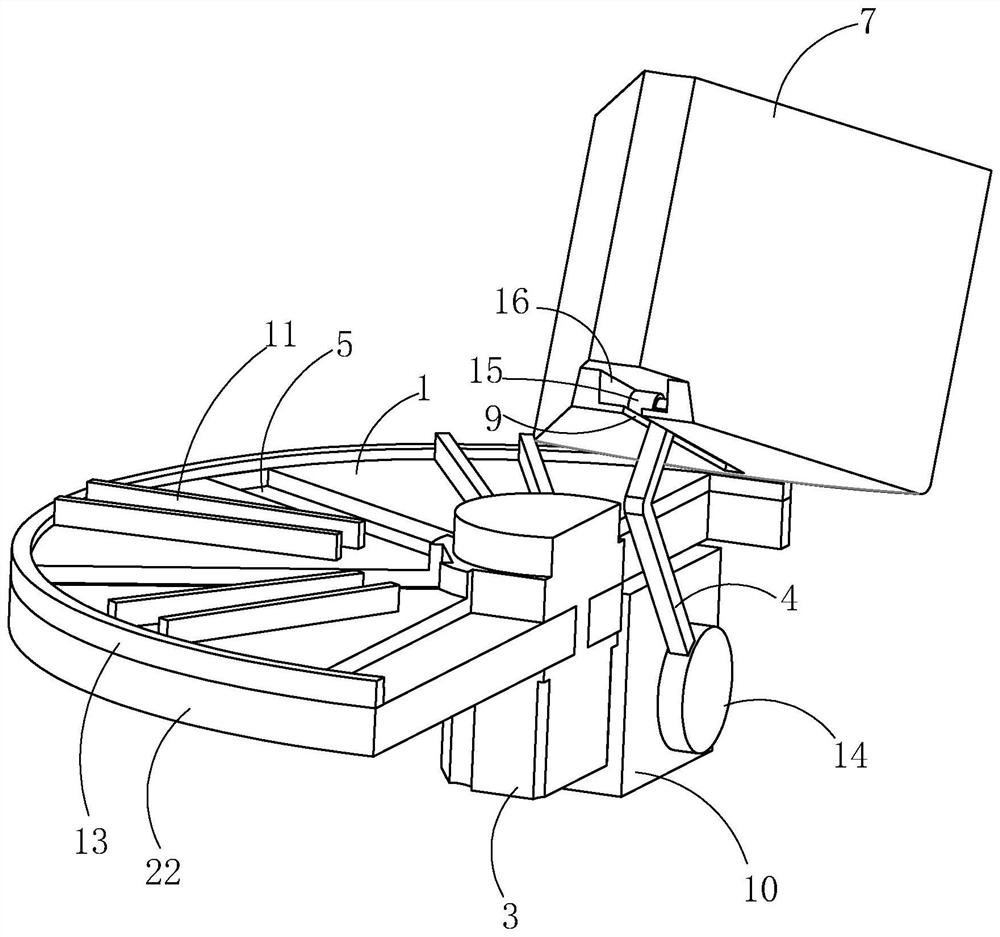
图1是本申请一实施例中全自动送菜装置的整体结构示意图;
图2是本申请一实施例中推杆推动置料盒翻转时的结构示意图;
图3是本申请一实施例中推杆与置料盒的结构示意图。
附图标记说明:1、置物板;2、支撑架;21、支撑腿;22、支撑板;3、驱动电机;4、推杆;5、通孔;6、避空孔;7、置料盒;8、圆筒;9、滑槽;10、电机保护箱;11、限位块;12、凸块;13、凸边;14、圆板;15、轴承;16、限位槽;17、限位杆。
具体实施方式
以下结合附图1-3对本申请作进一步详细说明。
本申请实施例公开一种全自动送菜装置。参照图1和图2,全自动送菜装置包括支撑架2以及安装在支撑架2上的置物板1,支撑架2上安装有驱动置物板1自转的驱动件,置物板1上活动放置有置料盒7,置物板1上正对置料盒7底部的位置处开有若干通孔5,通孔5成周向间隔分布在置物板1上,支撑架2上开有正对置料盒7底部的避空孔6,支撑架2上设置有推动置料盒7以置料盒7底部为支点进行翻转并复位的推动组件,当支撑架2上安装有当通孔5与避空孔6对准时,推动组件从通孔5和避空孔6中穿出以推动置料盒7进行转动。
参照图1,置料盒7的横截面呈扇形,置料盒7较大弧边所在的弧面沿置料盒7的高度方向固定连接有凸块12,置物板1的侧边凸设有首尾闭合的凸边13,凸边13与置物板1一体成形,凸块12靠近凸边13的一端设置有斜面,斜面位于凸边13的上方,斜面从远离置料盒7侧面方向朝向置料盒7方向向下倾斜设置,当置料盒7完全翻转时,凸块12上的斜面与凸边13抵触。
参照图1,支撑架2包括四条呈矩形分布的支撑腿21以及固定在支撑腿21顶部圆形的支撑板22,置物板1也呈圆形,置物板1与支撑板22同圆心放置。
参照图1,在本实施例中,驱动件包括驱动电机3,转动电机固定在支撑板22的背面,驱动电机3的转轴套接固定有圆筒8,圆筒8穿过支撑板22并与置物板1固定连接,圆筒8的中轴线与置物板1的中轴线重合,圆筒8与支撑板22转动连接。驱动电机3在转动时带动圆筒8转动,圆筒8转动时,带动置物板1绕圆筒8的中轴线转动,进一步带动置物板1上的置料盒7移动。在其他实施方式中,驱动件还可以是齿轮和齿条的相互配合。
参照图2和图3,推动组件包括推杆4和推动件,推动件固定在支撑架2上,推动件与推杆4的一端固定连接以推动推杆4的一端运动,置料盒7的底部设置有滑槽9,滑槽9从置物板1的侧边朝向中心位置方向延伸设置,滑槽9的一端贯通,当通孔5与避空孔6对准时,推杆4从滑槽9的开口处伸进滑槽9内并在推杆4的持续运动中沿着滑槽9滑动。
参照图3,推动件包括推力电机(图中未示出),支撑板22的背面靠近避空孔6的位置处安装有电机保护箱10,推力电机安装在电机保护箱10内,推力电机的转轴穿出电机保护箱10外,推力电机转轴的端部固定连接有圆板14,推力电机的转轴与圆板14中心点位置连接,推杆4与圆板14的圆周面固定连接,推杆4在圆板14的带动下运动。
参照图3,推杆4成两段式设置,推杆4的两段之间呈100°弯折,以便推杆4的一端伸入滑槽9内,在其他实施方式中,还可以是呈110°弯折、95°弯折、105°弯折等。电机保护箱10的侧边固定连接有限位杆17,限位杆17水平放置,当推力电机处于复位状态时,推杆4与限位杆17的上端面抵接。
参照图3,推杆4远离与圆板14固定的一端固定有横杆(图中未示出),横杆垂直于推杆4设置,横杆的中部与推杆4固定,横杆的两端均套接有轴承15,轴承15与横杆固定连接,滑槽9两个相对的侧壁均凹陷有限位槽16,横杆的两端分别伸入限位槽16内,轴承15与限位槽16滑动连接。
参照图3,滑槽9从置物板1侧边朝向中心位置处延伸设置,滑槽9的一端开口,滑槽9的另一端封闭(限位槽16的设置与滑槽9一致),横杆从限位槽16的开口端可伸入滑槽9内,并滑动至滑槽9的封闭端,此时置料盒7刚好被顶起翻转至将菜从置料盒7内倒出。
参照图3,通孔5靠近相邻通孔5的两侧均设置有限位块11,限位块11从置物板1侧边朝向中心位置处延伸设置,当置料盒7放置在置物板1上时,通孔5两侧的限位块11对置料盒7的两侧进行限位。
参照图3,置料盒7靠近圆筒8的一侧且在靠近置物板1的一侧朝向置料盒7顶部凹陷形成插入口,以便推杆4一端从滑槽9的开口端伸入滑槽9内。
为了增加置料盒7翻转复位时的稳定性,在置物板1上并位于置料盒7底部固定有电磁铁,电磁铁位于通孔5与限位块11之间的位置处,每个置料盒7底部均安装有磁石,磁石可与电磁铁吸合固定。
通孔5的内壁安装有信号器,信号器与推力电机信号连接,当通孔5与避空孔6正对时,信号器向电机发送启动信号以启动电机。
在本实施例中,信号器为光电开关,在其他实施方式中,信号器还可以是微动开关、行程开关、光耦器等等。
本实例一种全自动送菜装置的实施原理为:
在炒菜时,启动驱动电机3以使得置物板1转动以带动置料盒7转动,当其中一个置料盒7转动至正对锅的位置,此时该置料盒7的通孔5正对避空孔6,信号器向推力电机发送信号,推力电机启动以驱动推杆4转动,以使得推杆4的一端伸入到滑槽9内,推杆4与滑槽9的底部抵接,推杆4在推力电机持续转动中,伸出通孔5的长度变长,推杆4对置料盒7的底部施加推力以使得置料盒7一端太高从而发生翻转,直到推杆4与滑槽9封闭的一端抵接,置料盒7完全翻转,置料盒7内的菜掉入到锅内,然后推力电机反转,凸块12上的斜面与凸边13抵接,凸块12作为置料盒7翻转的支点,配合推杆4对置料盒7施加的拉力,以使得置料盒7可以翻转复位。
本申请实施例还公开一种全自动送菜装置的控制方法。参照图2,全自动送菜装置的控制方法包括以下步骤:
S100:获取预设菜单并根据预设菜单确定炒菜步骤信息。
在本实施例中,预设菜单是指炒锅内即将要烹饪的食材类型;炒菜步骤是指每个炒菜时间节点需要向锅内投放的食材。
具体地,通过用户输入或者是从系统内读取的方式以获得菜单,然后根据所获取的菜单读取与菜单对应的菜谱,菜谱中有关于炒菜的各个顺序步骤,进而确定投放食材的顺序和时间节点。
S200:根据炒菜步骤信息向驱动电机3和推力电机发送相对应的控制指令以控制对应置料盒7翻转时间。
在本实施例中,控制指令是指控制推力电机启动的指令、电机复位的指令、驱动电机3启动的时间。
具体地,在获取了炒菜步骤信息之后,向驱动电机3发送启动指令以使得驱动电机3驱动置物板1转动以使得需要投放食材的置料盒7转动至正对锅的位置,当通孔5与避空孔6正对时,推力电机获得触发信号,推力电机启动以驱动推杆4推动置料盒7翻转,置料盒7翻转时,置料盒7保持翻转状态三秒(实际的时间可以根据需要进行调整),然后控制推力电机复位,推力电机反向转动,以带动置料盒7复位。在下一个投放食材的时间节点到来时,驱动电机3和推力电机再一次启动,重复相同的动作,以将另一置料盒7内的菜投放到锅内。
进一步地,在一实施例中,基于所述预设菜单获取若干置料盒中带粘性食材的特性以生成特性信息;基于所述特性信息以获取待粘性置料盒复位信息;基于所述复位信息以在置料盒复位至预设位置时再次控制所述推力电机驱动置料盒翻转。
在本实施例中,带粘性的食材是指会粘在其他物体上的食材,如切片后的土豆、黄瓜、猪肉等。置料盒复位信息是指置料盒在第一次翻转后的复位。
具体地,在获取了菜单之后,得到菜单中包含的食材的种类,然后在将菜单中的食材放入到不同的置料盒中之后,获取粘性食材的位置信息并对该位置信息进行记忆,以在该置料盒到达预设位置并翻转后,推力电机控制该置料盒翻转复位至预设位置(在本实施例中,预设位置是指置料盒完全复位行程的四分之一,在其他实施方式中,也可以是三分之一、五分之二等),然后再次控制推力电机转动以推动置料盒朝锅方向再次翻转,以使得置料盒内的食材在置料盒晃动的过程中脱离置料盒掉落到锅内,进行翻炒,减少了食材的浪费,也方便了后续的置料盒的清洗。
以上均为本申请的较佳实施例,并非依此限制本申请的保护范围,故:凡依本申请的结构、形状、原理所做的等效变化,均应涵盖于本申请的保护范围之内。
- 全自动送菜装置及其控制方法
- 一种全自动收卷装置排线的控制方法及全自动收卷装置