用于无创记录生命体征的多部分装置
文献发布时间:2023-06-19 12:25:57
技术领域
本发明涉及一种用于记录生命体征的装置,特别是借助手指传感器连续确定手的至少一个手指上的动脉内血压的装置。该装置基于基座装置和经由特殊接口与其耦合的身体接触装置之间的相互作用。该装置优选地使用具有至少一个光源、至少一个光接收器或光检测器以及至少一个可充气袖带的体积描记布置结构。
背景技术
血压的连续无创测量代表当今测量技术的一大挑战。所谓的血管卸载技术(其可追溯到Peňáz的一份公开(第十届国际医学和生物工程会议摘要,1973年,德累斯顿)并通过各种因素得到改善)开始在市场上立足。
在血管卸载技术中,近红外光被辐射到手指中,并且基于由光电检测器捕获的未吸收部分来确定手指中的脉动(脉冲形)血流(实际上是变化的血量)。对于这个过程(也称为光电容积描记法(PPG)),通常在以一个或多个波长工作的一个或多个发光二极管(LED)的帮助下产生(近红外)光,并在一个或多个光敏接收器二极管(光电二极管)的帮助下被检测。其他类型的光接收器基本上也适合代替二极管。
然后,控制系统通过在手指上的袖带(袖带压力)pc(t)中施加反压力来保持体积描记法记录的流量(或检测到的血量)以及因此由此产生的光体积描记信号(体积信号v(t))恒定。这种反压力pc(t)通常由快速阀或阀系统与泵一起调节。阀或阀系统的相关致动由控制单元执行,该控制单元优选地用微型计算机实施。这种情况下的主要输入信号是PPG信号v(t)和袖带压力pc(t)。保持PPG信号v(t)恒定所需的压力pc(t)于是对应于动脉内血压pa(t)。
为此,有必要使地袖带压力pc(t)至少能够与动脉内血压pa(t)的变化一样快地变化,使得满足实时条件。pa(t)的上限频率以及因此最高压力变化率大于至少20 Hz,这对于压力控制系统来说无疑是一个挑战。结果是借助于阀或阀系统的压力控制有利地位于袖带的紧邻处。如果空气管线太长,则由于管线的低通效应,存在失去该上限频率条件的风险。
已知许多关于血管卸载技术的公开:
从美国专利号4,406,289中已知一种机械阀,其在其供应有线性泵时以期望的精度调节手指袖带中的反压力。阀被容纳在远侧前臂上的外壳中,并且因此经由短管向手指袖带供应压力pc(t)。
美国专利号4,524,777描述了一种用于血管卸载技术的压力产生系统,恒定的袖带压力pc也是用线性泵产生的,该压力Pc与来自并联连接的振动器或驱动致动器的压力波动Δpc(t)叠加。
美国专利号4,726,382公开了一种用于血管卸载技术的手指袖带,该手指袖带具有用于供应有袖带压力pc(t)的软管连接。空气管的长度延伸到压力产生系统,压力产生系统进而附接到远侧前臂。
WO 2000/059369 A1还描述了一种用于血管卸载技术的压力产生系统。这里的阀系统由单独的入口阀和单独的出口阀组成。而在美国专利号4,406,289和美国专利号4,524,777中必须使用相对线性的比例泵,该系统使得能够使用简单、廉价的泵,因为破坏性谐波可以通过阀的布置结构来消除。此外,简单泵的能量消耗可以通过阀原理显著降低。
WO 2004/086963 A1公开了一种用于血管卸载技术的系统,其中可以在一个手指中连续确定血压,同时在相邻手指中检查测量质量(看门狗功能)。过一会儿后,系统自动用监测手指替换测量手指。
WO 2005/037097 A1描述了一种用于血管卸载技术的控制系统,其具有几个相互链接的控制回路。
WO 2010/050798 A1公开了一种附接到远侧前臂的压力产生系统(前端),该系统具有仅一个阀,用于血管卸载技术的手指袖带可以附接到该阀。
通过WO 2011/045138 A1中描述的用于血管卸载技术的压力产生系统,降低了泵的能量消耗——类似于WO2000/059369——并且可以消除谐波。
WO 2011/051819 A1公开了一种血管卸载技术的实施方式,该技术借助于数字电子器件得到了改善,以增加稳定性和进一步小型化。
WO 2011/051822 A1描述了一种用于血管卸载技术的方法,其中测量的信号v(t)和pc(t)被处理以增加长期稳定性并确定进一步的血液动力学参数。特别地,公开了一种用于消除由手指动脉中血管舒缩变化引起的影响的方法和一种用于确定心输出量(CO)的方法。
WO 2012/032413 A1描述了一种新型手指传感器,其具有一次性使用的一次性部分。出于卫生原因,与手指接触的袖带容纳在一次性部分中,而相关联的压力产生和压力控制系统容纳在可重复使用部分中。因此,在这种情况下,必须在一次性部分和可重复使用部分之间提供可分离的气动连接。
一般来说,现有技术中的压力产生和压力控制系统附接到远侧前臂,靠近手腕,这具有显著的缺点:该点常常用于静脉内的通路;此外,桡动脉远端处的动脉内通路在紧急情况下应当是畅通的。压力产生和压力控制系统及其附件会堵塞这些通路。另外,系统在操作期间可能会滑动或倾斜。这会对传感器的配合产生不利影响。如果要测量的手指或对应的手处于某个静止位置中,则传感器的配合也将会得到改善。
为了克服这个问题,公开WO 2017/143366 A1提出了一种用于连续确定手的至少一个手指上的动脉内血压的测量系统,该测量系统具有至少一个手指传感器、体积描记系统、至少一个光源(优选为具有一个或多个波长的LED)、至少一个光学传感器和至少一个可充气袖带、以及具有至少一个借助体积描记系统实时调节的阀的压力产生系统,用于在袖带中产生基本上对应于手指动脉内血压的压力,测量系统具有外壳,该外壳具有用作用于所述至少一个手指和手掌邻近区域的支撑表面的表面。在此,手静置在支撑件上,支撑件下有常规系统中附接到前臂的基本部件。
类似于前面提到的WO 2012/032413 A1,袖带容纳在一次性部分中,该一次性部分可以与外壳分离(并且因此与手支撑件分离)。因此,在这种情况下,必须在一次性部分和可重复使用部分之间提供可分离的气动连接。
最后提到的公开中的气动连接提出了存在开口、特别是在可重复使用的外壳上存在开口的问题,这可能难以清洁和消毒。
发明内容
因此,本发明的目的是提供一种用于无创记录生命体征的装置,其实现了改善的清洁和消毒。
根据本发明,上述目的借助于根据权利要求1的用于记录生命体征、特别是动脉和/或静脉血压的装置来实现。该装置也可以被称为测量系统,并且优选地具有至少一个基座装置和身体接触装置,基座装置具有用于向工作流体施加压力的器件,身体接触装置用于身体部分、特别是一个手指或几个手指的限定布置。身体接触装置可以被称为手指传感器或手指定位装置或可互换部分。基座装置和身体接触装置可以可拆卸地彼此耦合以形成操作构型,基座装置具有用于界定接收空间的至少一个外壳,外壳具有用于布置身体接触装置的至少一个接触表面,接触表面可以借助于能够关闭阀装置的贯通开口的关闭构件关闭,阀装置至少主要布置在接收空间的内部。身体接触装置因此可以耦合到外壳,并且由此耦合到基座装置。优选提供弹簧、特别是由金属或聚合物材料制成的弹簧,用于向关闭构件施加弹簧力。工作流体通常是气体,例如空气,但是与作为工作流体的液体反应也是有利地可能的。在本申请中,根据该词的通常含义,流体通常被理解为指气体或液体。弹簧可以是拉伸弹簧或压缩弹簧,弹簧优选为螺旋弹簧。关闭构件可以通过弹簧转移到关闭通道的位置中,并且通道是基座装置侧上的流体管线的一部分。在这种情况下,流体管线优选地被设计成传导气态工作流体,特别是空气。身体接触装置具有至少一个压力施加器,该压力施加器可以被工作流体作用,特别是用于一个或两个手指,用于对身体部分受控地施加压力,特别是在几个手指的情况下,优选地对每个手指单独地施加压力。身体接触装置优选地具有至少一个密封元件,用于产生与基座装置的流体连接。密封元件优选具有一种或至少一种聚合物材料,或者由聚合物材料组成。密封元件优选地具有用于布置在身体接触装置的接收点处的固定部分和密封部分。固定部分和密封部分优选地彼此连接成一体,固定部分和密封部分可能由不同的材料组成(例如两个或多个组成部分)。固定部分优选地被设计成封闭接收点,并且优选地以中空或管状形式在密封元件的纵向方向上延伸。密封元件和压力施加器之间的身体接触装置优选地在身体接触装置侧上具有流体管线,其中密封元件可以压靠在基座单元的接触表面上,以便封闭通道。身体接触装置优选地具有销状的、特别是突出的偏转器件,用于偏转关闭构件。偏转器件优选由聚合物材料制成或具有聚合物材料,但是它也可以有利地由金属或金属增强材料制成。在操作构型中,偏转器件克服弹簧力而偏转关闭构件并形成流体连接。
这种解决方案是有利的,因为身体接触装置和基座装置被设计为独立的装置,并且因此可以实现不同的功能。基座装置优选地是可重复使用的,并且基座装置的表面可以被消毒或灭菌。身体接触装置也可以设计成可重复使用的。替代地,身体接触装置可以旨在供一次性使用。身体接触装置优选不具有测量或记录生命体征所需的任何电气部件。
进一步的优选实施例是从属权利要求和说明书的以下部分的主题。
根据本发明的另外的优选实施例,关闭构件形成外壳的接触表面的一部分,接触表面的由关闭构件形成的部分在解耦构型(或非操作构型)中与接触表面的周围表面部分齐平。该实施例是有利的,因为它使得能够简单和彻底地清洁基座装置的表面。这里的齐平优选地意味着接触表面在关闭构件和外壳之间的过渡处没有突起或凹陷。
优选地,接触表面的表面部分在关闭构件的轴向中心周围不具有半径最大为10毫米或最大为20毫米或最大为30毫米或最大为40毫米或最大为50毫米的孔、凹陷和/或凹槽。这优选地适用于基座装置的整个接触表面或整个表面。优选地,接触表面具有< 5 µm或< 1µm或< 0.5 µm或< 0.1 µm或< 0.05 µm或< 0.01 µm的平均粗糙度值。
根据本发明的另外的优选实施例,密封元件具有圆锥形或钟形套环,圆锥形或钟形套环至少暂时地并且至少部分地在周向方向上围封偏转器件,偏转器件布置在圆锥形或钟形套环的中心,第一端的区域中的圆锥形或钟形套环在径向方向上比在第二端的区域中与偏转器件间隔得更远,圆锥形或钟形套环的第一端旨在用于建立与接触表面的接触。该实施例是有利的,因为圆锥形或钟形套环支持身体接触装置在基座装置上的正确位置中的容易附接。此外,在轴向和径向方向上有利地存在公差补偿。
根据本发明的另外的优选实施例,偏转器件与密封元件相对地固定定位,并且在密封元件的圆锥形或钟形套环和偏转器件之间优选地形成至少或精确地形成一个流体通道,优选地形成几个流体通道。一个流体通道或多个流体通道优选被理解为轴向孔或穿孔。
根据本发明的另外的优选实施例,偏转器件相对于密封元件可移动地布置,密封元件形成通道,该通道可由偏转器件流体密封地关闭,偏转器件在非使用构型中关闭密封元件的通道,并使得其能够处于操作构型。该实施例是有利的,因为减少或限制了在身体接触装置中形成的工作流体管线部件和/或工作流体吸收部件被诸如细菌、病毒或真菌的生物材料污染的风险。以这种方式还可以有利地实现防止清洁剂或消毒剂渗透的密封。
根据本发明的另外的优选实施例,提供弹簧用于偏转偏转器件,偏转器件优选可沿直线偏转,由于偏转器件的直线偏转,弹簧在操作构型下比在非使用构型下受到更大的压缩。该实施例是有利的,因为身体接触装置和基座装置之间的流体连接是自动产生的,并且仅当两个装置彼此机械耦合时才产生。
根据本发明的另外的个优选实施例,偏转器件或偏转元件的偏转受到止动件限制,其中,由于锥形或钟形套环的变形,与偏转元件能够偏转或与基座装置的阀装置的关闭构件偏转或可偏转相比,通道可以根据量移动地更靠近基座装置。作用在关闭构件上的弹簧的弹簧力优选地不同于作用在偏转元件上的弹簧的弹簧力。它优选更高或更低。替代地,弹簧力也可以相同。该实施例是有利的,因为当弹簧力不同时,流体连接的产生导致各个管线区段在不同的时间处被释放。根据本发明的另外的优选实施例,偏转元件的偏转和基座装置的阀装置的关闭构件的偏转总体上对应于密封元件由于圆锥形套环的变形而向接触表面的接近。
根据本发明的另外的优选实施例,用于对工作流体、特别是空气加压的至少一个泵装置设置在基座装置侧上,该泵装置优选地直接耦合到流体管线。替代地,可以提供能够连接到基座装置的外部泵装置。
优选地,至少一个光信号源和一个光学传感器装置被提供作为外壳的一部分或提供在外壳内,泵装置或压力施加器或阀装置设置在流体管线中,特别是以这样的方式,即,其可以根据光学传感器装置检测到的光信号来控制或致动。压力施加器可以具有能够被致动或控制的阀装置,或者能够被致动或控制的阀装置可以是流体管线或泵装置的一部分。在这种情况下,阀装置或压力设定阀装置可以是可致动的,用于设定恒定压力或预定或可预定的压力曲线。特别地,阀装置或压力设定阀装置可以被电致动。阀装置或压力设定阀装置优选地布置在基座装置或身体接触装置中。
上述目的也借助于在根据本文所述的本发明的装置中使用的基座装置来实现。基座装置优选地具有用于限定接收空间的至少一个外壳,该外壳具有用于布置身体接触装置的至少一个接触表面,该接触表面具有能够借助于阀装置的关闭构件关闭的通道,阀装置至少大部分布置在接收空间的内部,提供弹簧用于向关闭构件施加弹簧力,该关闭构件可通过弹簧转移到关闭通道的位置中,并且通道开口是基座单元上的流体管线的一部分,提供用于对工作流体、特别是空气加压的至少一个泵装置,该泵装置耦合到流体管线。
根据本发明的优选实施例,至少一个光信号源被提供作为基座装置的外壳的一部分或提供在基座装置的外壳内,和/或至少一个光学传感器被提供作为基座装置的外壳的一部分或提供在基座装置的外壳内。泵装置优选地根据来自传感器装置的信号或数据来控制,或者可以根据来自传感器装置的信号或数据来控制,有可能根据检测到的光信号产生来自传感器装置的信号或数据,所述检测到的光信号由通过光信号源发射的光信号得到。处理器装置或控制装置也可以是基座装置的一部分。处理器装置或控制装置优选承担传感器数据和/或可能的阀控制和/或泵控制的处理和/或评估。该解决方案是有利的,因为所有或至少大多数致动器或有源装置、元件和/或部件优选地是紧凑单元的一部分。
上述目的也通过在根据本发明的装置中使用的身体接触装置来实现。身体接触装置优选地具有至少一个压力施加器,特别是袖带,该压力施加器可以被工作流体、特别是空气作用,用于对身体部分、特别是一个或多个手指的受控地施加压力,并且压力施加器优选地指定身体部分在身体接触装置上的定位。优选提供至少一个密封元件,用于将身体接触装置可释放地耦合到工作流体供应装置,特别是根据权利要求10的基座装置,身体接触装置优选地具有在密封元件和压力施加器之间延伸的流体管线,身体接触装置特别优选地具有销形偏转器件,其中,销形偏转器件至少部分地或至少暂时地沿着密封元件的纵向延伸方向被密封元件完全围封。这种解决方案是有利的,因为手或手指的位置是直接预先确定的。此外,身体接触装置可以非常廉价地设计,并且因此适合于廉价的一次性使用。
根据本发明的另外的优选实施例,提供了用于向身体部分传送辐射和/或向传感器装置提供辐射的至少一个光导,其中流过流体管线的流体流、特别是流体流的压力可根据通过光导传导的辐射来控制。该实施例是有利的,因为待检查的身体部分不是放置在基座装置上,而是放置在布置在基座装置上的身体接触装置上。因此,在基座装置和身体部分之间很少或没有接触,其结果是基座装置的污染受到限制。
上述装置可以特别地用于动脉血压的连续、无创测量。该方法优选地包括以下步骤:提供根据权利要求1至9中任一项所述的装置,其中所述基座装置和所述身体接触装置在操作构型中彼此耦合;在压力施加器中定位身体部分,特别是一个手指或几个手指;借助于光信号源产生光信号,该信号源是基座装置或身体接触装置的一部分,其中光信号被耦合到身体部分中;在耦合到身体部分中之后,特别是在由身体部分散射和/或反射之后,借助于光学传感器装置检测光信号,其中光学传感器装置是基座装置或身体接触装置的一部分;由光学传感器装置产生信号或数据,该信号或数据表示检测到的光信号;根据由光学传感器装置产生的信号或产生的数据,设定借助于压力施加器施加到身体部分的压力。
根据本发明的另外的优选实施例,信号源、传感器装置和泵装置是基座装置的一部分,其中由信号源产生的光信号从基座装置通过身体接触装置传递到身体部分,并且其中由身体部分散射和/或反射的辐射通过身体接触装置传递到基座装置,并且其中,由泵装置输送的工作流体是空气,空气从基座装置被输送到身体接触装置中的流体管线中并通过该流体管线到达压力施加器。根据血管卸载技术的测量通过传感器装置、信号源和压力施加器中的压力产生/压力设定的相互作用成为可能,特别是借助于泵装置和/或控制阀装置,特别是在袖带中。
本发明的另外的优点、目的和性质将参照以下附图说明进行解释,其中根据本发明的装置或根据本发明的装置的部件以示例的方式示出。优选地用于根据本发明的装置或根据本发明的方法中的和/或至少基本上对应于它们在附图中的功能的部件或元件可以用相同的附图标记来标识,其中这些部件或元件不必在所有附图中进行编号或解释或实施。
附图说明
示出了以下内容:
图1a-d 根据本发明的装置、其部件(基座装置和身体接触装置)、以及装置上身体部分的示意性布置结构的示意性示例;
图2a 身体接触装置的管线区段,该身体接触装置具有固定地布置到其上的密封元件和固定地布置的偏转器件;
图2b 身体接触装置的管线区段,其中密封元件设置在管线区段上,并且可移动地布置的偏转器件以密封方式与密封元件相互作用。因此,密封元件形成彼此间隔开的两个有效密封表面,一个有效密封表面被设计成与偏转器件相互作用,并且一个有效密封表面被设计成与基座装置的接触表面相互作用;
图3a 第一阀装置,所述阀装置至少部分地直接设置在阀外壳中,其中,阀外壳布置或形成在基座装置的外壳中;
图3b 第二阀装置,所述阀装置至少部分地设置或形成在基座装置中;
图4a 与图3b所示的布置结构一起处于第一状态的图2b所示的布置结构,在该状态下,密封件、特别是套环变形;以及
图4b 与图3b所示的布置结构一起处于第二状态的图2b所示的布置结构,在该状态下,密封件、特别是套环以及弹簧已经变形,由此在基座装置和身体接触装置之间打开或释放或形成流体管线;
图5a 与图3b所示的布置结构一起处于第一状态的图2a所示的布置结构,即,处于解耦状态;和
图5b 处于第二状态的图5a所示的部件,其中,在该第二状态下,密封件、特别是套环变形,并且偏转器件克服弹簧力偏转关闭构件;和
图6 以透视图示和透视截面图示示意性示出的图5a所示的布置结构。
具体实施方式
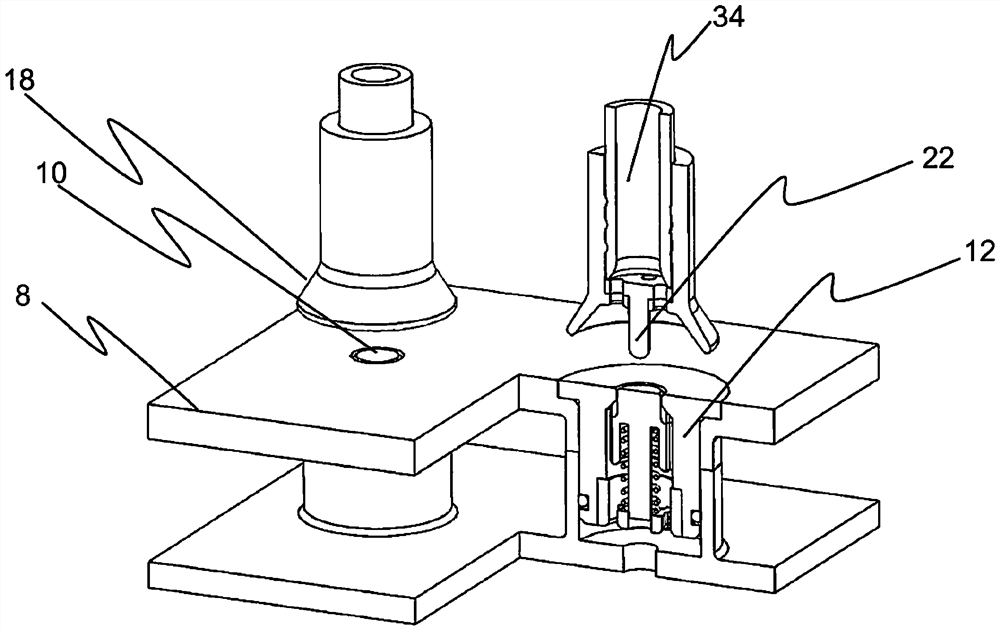
图1a示出了根据本发明的身体接触装置2的示例。该身体接触装置2具有压力施加器18,特别是袖带或压力袖带。在操作状态下,压力施加器经由一条或多条流体管线与布置在基座装置1中的泵装置1功能性地连接,特别是流体连接(参见,图1b)。附图标记30纯粹示意性地表示光耦合表面,该光耦合表面用于将光从光导耦合或耦合到光导中或从光导解耦或解耦到光导中,以向身体部分4提供辐射(参见,图1d)和/或用于将从身体部分反射和/或散射的光供应给传感器装置。替代地,该装置也可以这样设计,使得在身体接触装置2或基座装置1中提供光源或光检测器,用于将光从身体部分直接耦合或直接耦合到身体部分中或从身体部分直接解耦或直接解耦到身体部分中,而没有插入的光导。
附图标记20表示密封元件或密封件或密封装置,其优选地具有钟形或(如图所示)圆锥形套环24。
密封元件20可以在基座装置1的表面8上围绕阀装置12的关闭构件10布置(参见,图3a和3b)。
图1c示出了根据本发明的装置3的示意性表示。
在图1d中,示意性地示出了根据本发明的装置3,其中人手4布置在其上。
图2a示出了身体接触装置2的流体管线元件,其至少部分地被密封元件20包围。密封元件20具有至少一个或精确地一个通道26。通道26优选地总是打开或解锁的。在这种情况下,附图标记22表示用于重新定位关闭构件10的偏转器件。
图2b示出了身体接触装置1的替代流体管线元件,偏转器件22可以经由具有密封表面23的弹簧28压靠在密封元件20的优选中心通道上。密封元件20还具有锥形套环24。在这种情况下,密封元件20优选地具有精确的一个通道。
图3a示出了第一阀装置12。阀装置12具有关闭构件10,该关闭构件10与基座装置1的表面8或基座装置的外壳6齐平。附图标记32表示压缩空气源,特别是从泵装置开始。
图3b示出了第二阀装置12。根据该阀装置12,提供了阀外壳13,阀装置12借助于阀外壳13耦合到基座装置1的外壳6。
图4a示出了处于第一状态的来自图3b的阀装置和来自图2b的布置结构。密封元件20已经具有第一变形,并且偏转器件22已经实现了关闭构件10的重新定位。然而,密封表面23在这种状态下仍然密封。
在图4b中,密封元件20的变形、特别是套环24的变形已经进一步发展,其结果是身体接触装置2的管线元件已经移动得更靠近基座装置1。在关闭构件10的限定偏转之后,密封元件20然后相对于偏转器件22发生相对移动,由此通道26被释放。
图5a示出了来自图2的布置结构和来自图3b的阀装置12。在这种情况下,密封元件20只能经历变形,并且关闭构件10可以偏转。关闭构件10的偏转优选与密封元件20的变形直接相关。这种关系由图5b示出。
在图6中,图5a所示的布置结构以透视图示并以截面图示示出。
因此,本示例性实施例涉及用于记录生命体征的装置3。该装置3具有:基座装置,其具有用于对工作流体加压的泵装置和用于身体部分4(特别是手指)的限定布置的身体接触装置2,基座装置1和身体接触装置2可释放地彼此耦合以形成操作构型,其中基座装置1具有用于界定接收空间的外壳6,外壳6具有用于布置身体接触装置2的接触表面8,接触表面8具有可以借助于阀装置12的关闭构件10关闭的通道14,阀装置12至少主要布置在接收空间的内部,其中设置有弹簧16用于关闭构件10的弹簧力加载,其中关闭构件10被弹簧16转移到关闭通道14的位置中,并且其中通道14是基座装置上的流体管线的一部分,其中身体接触装置2具有至少一个压力施加器18,该压力施加器可以被工作流体作用,用于对身体部分4受控地施加压力,其中身体接触装置2具有至少一个密封元件20,用于产生与基座装置1的流体连接,其中身体接触装置2在身体接触装置侧上在密封元件20和压力施加器18之间具有流体管线,其中密封元件20可以压靠在接触表面8上以封闭通道14,其中,身体接触装置2具有用于偏转关闭构件10的偏转器件22,其中,偏转器件22在操作构型中抵抗弹簧力偏转关闭构件10并形成流体连接。
附图标记列表
1 基座装置
2 身体接触装置
3 装置
4 身体部分(第一身体部分/第一手指)
5 第二身体部分(第二手指)
6 外壳
8 接触表面
10 关闭构件
12 阀装置
13 阀外壳
14 通道
16 弹簧
18 压力施加器/袖带
20 密封元件
22 偏转器件
23 密封件和偏转器件之间的密封表面
24 套环
26 流体通道/通道(在密封元件中)
28 弹簧(用于偏转偏转器件)
30 光耦合表面
32 压缩空气供应
34 身体接触装置中的流体管线
- 用于无创记录生命体征的多部分装置
- 用于半导体处理等离子反应器的多部分电极以及替换多部分电极的一部分的方法