一种飞机舵面电液伺服作动器调零方法
文献发布时间:2023-06-19 12:27:31
技术领域
本发明属于飞机设计领域,具体涉及飞机舵面电液伺服作动器零位调整的方法。
背景技术
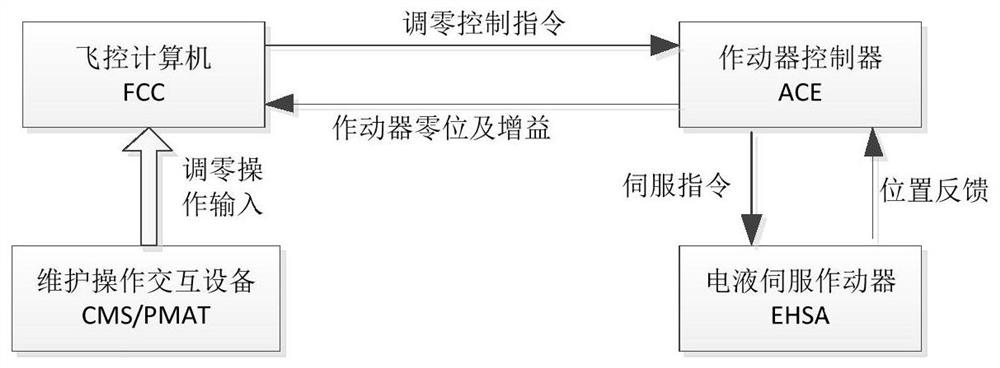
在现代民用飞机设计中,电传飞控系统已逐步取代了传统的机械操纵系统。飞行员的操纵输入信号通过角位移传感器采集后上报给飞控计算机,飞控计算机根据飞机状态解算出各操纵面的控制指令,并将指令下发给作动器控制器,作动器控制器根据飞控计算机指令来控制相应的电液伺服作动器动作,最终使飞机舵面运动到指定位置。
电液伺服作动器作为飞机舵面的驱动装置,其控制精度直接影响飞机的飞行性能和飞行安全,而电液伺服作动器零位的准确性直接影响其控制精度。电液伺服作动器零位调整是飞控系统的一项关键技术,如何有效对电液伺服作动器零位进行调整是飞控系统设计的一个技术难点。
传统的电液伺服作动器零位调整方法是机械调零,即通过人工对电液伺服作动器上的调零螺母进行旋转,使舵面的零位与固定翼零位刻度线相齐平。由于电液伺服作动器机械调零操作空间有限,调零困难,精度不高,时间较长,从而增加了航空公司的维护成本和运营成本。航空公司也迫切希望有一种更方便、易操作、低维护成本的电液伺服作动器调零方法。
发明内容
为了解决现有技术中飞机舵面电液伺服作动器传统机械调零方法所带来的高维护成本和运营成本问题,本申请的目的在于提供一种飞机舵面电液伺服作动器调零方法。
一种飞机舵面电液伺服作动器调零方法,含有维护操作交互设备、飞控计算机和作动器控制器,所述的电液伺服作动器含有与飞机舵面连接的内侧作动器和外侧作动器,其特征在于,通过维护操作交互设备选择需要调零的舵面,通过飞控计算机向作动器控制器发送指令,作动器控制器根据指令控制电液伺服作动器动作分别实施对舵面中立位调整、对舵面最大上偏位置调整、对舵面最大下偏位置调整。
对舵面中立位调整包含以下内容:
1)将与舵面连接的内侧作动器接通,同时断开该舵面连接的外侧作动器,通过飞控计算机向内侧作动器给出0°指令,内侧作动器驱动舵面发生偏转,根据舵面的实际偏转位置,通过飞控计算机调整内侧作动器的0°偏置值,使舵面实际偏转到0°位置时,将内侧作动器的0°偏置值存储到飞控计算机;
2)通过飞控计算机接通外侧作动器,使内外两作动器处于主-主工作模式,根据外侧作动器的位置反馈,通过飞控计算机给出外侧作动器的0°偏置值,使舵面保持在0°位置;
3)通过飞控计算机调整外侧作动器0°偏置值,使得内外两侧作动器的力纷争处于允许范围内,将外侧作动器的0°偏置值存储到飞控计算机。
对舵面最大上偏位置调整包含以下内容:
1)通过飞控计算机将与舵面连接的外侧作动器断开,通过飞控计算机向内侧作动器给出最大上偏指令,内侧作动器驱动舵面发生偏转,根据舵面的实际偏转位置,通过飞控计算机调整内侧作动器的上偏指令增益值,使舵面偏转到最大上偏位置时,将内侧作动器的上偏指令增益值存储到飞控计算机;
2)通过飞控计算机接通外侧作动器,使内外两作动器恢复到主-主工作模式,根据外侧作动器的位置反馈,通过飞控计算机给出外侧作动器的上偏指令及上偏指令增益值,使舵面保持在最大上偏转位置;
3)通过飞控计算机调整外侧作动器上偏指令增益值,使得内外两侧作动器的力纷争处于允许范围内,将外侧作动器的上偏指令增益值存储到飞控计算机;
对舵面最大下偏位置调整包含以下内容:
1)通过飞控计算机将与舵面连接的外侧作动器断开,通过飞控计算机向内侧作动器给出最大下偏指令,内侧作动器驱动舵面发生偏转,根据舵面的实际偏转位置,通过飞控计算机调整内侧作动器的下偏指令增益值,使舵面偏转到最大下偏转位置时,将内侧作动器的下偏指令增益值存储到飞控计算机;
2)通过飞控计算机接通外侧作动器,使内外两作动器恢复到主-主工作模式,根据外侧作动器的位置反馈,通过飞控计算机给出外侧作动器的下偏指令及下偏指令增益值,使舵面保持在最大下偏转位置;
3)通过飞控计算机调整外侧作动器下偏指令增益值,使得内外两侧作动器的力纷争处于允许范围内,将外侧作动器的下偏指令增益值存储到飞控计算机。
与传统电液伺服作动器机械调零方法相比,本发明具有以下优点:1)本发明采用电子调零方式,不需要维护人员在狭小的作动器维护空间内旋转调零螺母进行电液伺服作动器人工调零,减小了维护人员的工作量。2)本发明可以通过维护操作交互设备友好的人机交互页面进行电液伺服作动器电子调零。维护人员在维护操作交互设备中选择需要调零的舵面,点击调零开始,确认舵面位置,调零结束。整个调零过程主要由飞控系统自动执行,操作简便、快速,从而为航空公司节省大量维护时间和维护成本。
以下结合实施例附图对本申请做进一步详细描述:
附图说明
图1是电液伺服作动器调零架构图。
具体实施方式
以某型飞机左副翼调零为例进行说明。维护人员通过便携式维护操作交互设备选择左副翼调零选项,便携式维护操作交互设备将选择结果发送给飞控计算机,飞控计算机判断左副翼调零的外部条件,当外部条件满足时开始执行左副翼调零。具体调零过程如下:
首先对左副翼中立位调整
1.1)通过飞控计算机将与左副翼连接的内侧作动器接通,同时断开左副翼连接的外侧作动器,通过飞控计算机向内侧作动器给出0°指令,内侧作动器驱动舵面发生偏转,根据左副翼的实际偏转位置,通过飞控计算机调整内侧作动器的0°偏置值,使左副翼实际偏转到0°位置时,将内侧作动器的0°偏置值存储到飞控计算机;
1.2)通过飞控计算机接通外侧作动器,使内外两作动器处于主-主工作模式,根据外侧作动器的位置反馈,通过飞控计算机给出外侧作动器的0°偏置值,使左副翼保持在0°位置;
1.3)通过飞控计算机调整外侧作动器0°偏置值,使得内外两侧作动器的力纷争处于允许范围内时,将外侧作动器的0°偏置值存储到飞控计算机。
接着对左副翼最大上偏位置调整
2.1)通过飞控计算机将与左副翼连接的外侧作动器断开,飞控计算机向内侧作动器给出最大上偏指令,内侧作动器驱动舵面发生偏转,根据舵面的实际偏转位置,通过飞控计算机调整内侧作动器的上偏指令增益值,使内侧作动器伸出到极限位置,此时的指令增益值为内侧作动器的极限上偏指令增益值,选择一个内侧作动器的安全上偏指令增益值存储到飞控计算机,该安全上偏指令增益值大于上偏指令增益值小于极限上偏指令增益值。
出于安全考虑,可先将飞控计算机指令增益初步设置为0.8~0.9,内侧作动器驱动舵面发生偏转,通过便携式维护操作交互设备人机交互页面逐步增加指令增益,使作动器缓慢运动到极限位置。飞控计算机根据内侧作动器反馈的位置信息自动减小指令增益值使得作动器活塞杆距极限位置留有一定的安全裕度,对应舵面1°,同时将该增益值作为内侧作动器伸出方向限制增益值。观察左副翼实际位置,通过便携式维护操作交互设备人机交互页面调零按钮对左副翼上偏指令增益值进行调整,使左副翼到达最大上偏位置时,将内侧作动器的上偏指令增益值存储到飞控计算机。
2.2)通过飞控计算机接通左副翼外侧作动器,使内外两作动器恢复到主-主工作模式,根据外侧作动器的位置反馈,通过飞控计算机给出外侧作动器的上偏指令及上偏指令增益值,使舵面保持在最大上偏转位置。
2.3)通过飞控计算机调整外侧作动器上偏指令增益值,使得内外两侧作动器的力纷争处于允许范围内,将外侧作动器的上偏指令增益值存储到飞控计算机。
最后对左副翼最大下偏位置调整
3.1)通过飞控计算机将与左副翼连接的外侧作动器断开,通过飞控计算机向左副翼内侧作动器给出最大下偏指令,内侧作动器驱动舵面发生偏转,根据舵面的实际偏转位置,通过飞控计算机调整内侧作动器的下偏指令增益值,使内侧作动器伸出到极限位置,此时的指令增益值为内侧作动器的极限下偏指令增益值,选择一个内侧作动器的安全下偏指令增益值存储到飞控计算机,该安全下偏指令增益值大于下偏指令增益值小于极限下偏指令增益值。
出于安全考虑,可先将飞控计算机指令增益初步设置为0.8~0.9,内侧作动器驱动舵面发生偏转,通过便携式维护操作交互设备人机交互页面逐步增加指令增益,使作动器缓慢运动到极限位置。飞控计算机根据内侧作动器反馈的位置信息自动减小指令增益值使得作动器活塞杆距极限位置留有一定的安全裕度,对应舵面1°,同时将该增益值作为内侧作动器缩回方向限制增益值。观察左副翼实际位置,通过便携式维护操作交互设备人机交互页面调零按钮对左副翼下偏指令增益值进行调整,使左副翼到达最大下偏位置时,将内侧作动器的下偏指令增益值存储到飞控计算机。
3.2)通过飞控计算机接通左副翼外侧作动器,使内外两作动器恢复到主-主工作模式,根据外侧作动器的位置反馈,通过飞控计算机给出外侧作动器的下偏指令及下偏指令增益值,使舵面保持在最大下偏转位置;
3.3)通过飞控计算机调整左副翼外侧作动器下偏指令增益值,使得内外两侧作动器的力纷争处于允许范围内时,将外侧作动器的下偏指令增益值存储到飞控计算机。
- 一种飞机舵面电液伺服作动器调零方法
- 一种飞机操纵舵面自动调零方法