车位检测装置和用于监控车位的具有雷达的摄像机装置
文献发布时间:2023-06-19 13:26:15
技术领域
本申请涉及摄像机技术领域,尤其涉及一种车位检测装置和用于监控车位的具有雷达的摄像机装置。
背景技术
在监控车位时,通常使用雷达作为传感器用来检测车辆是否处于停靠或离开过程,由于车位周遭环境复杂,反射物较多,雷达单体发射角度较大,会使得雷达发出的超声波探测地面,雷达接收地面反射的反射波,根据该反射波产生探测距离,而导致误判,从而检测存在误差。
发明内容
本申请提供一种车位检测装置和用于监控车位的具有雷达的摄像机装置,可以防止雷达发出的超声波探测地面,提高检测准确度。
本申请提供一种车位检测装置,其中包括:
壳体,包括雷达安装孔和视窗;
雷达,组装于所述雷达安装孔,用于检测车辆的状态,所述雷达包括发射面;
雷达束波结构,固定于所述壳体,且包括主体部和从所述主体部的外表面向内凹陷的凹陷部,所述主体部固定于所述壳体,所述凹陷部包括相对的第一开口和第二开口,所述雷达对应所述凹陷部设置,所述发射面位于所述第一开口,所述第二开口相对于所述第一开口远离所述雷达,且所述第二开口大于所述第一开口;所述凹陷部的内表面包括从所述第一开口向所述第二开口的方向延伸的束波面,所述束波面包括第一面,所述第一面为从所述第一开口向所述第二开口的方向弯曲延伸的曲面,且至少部分位于所述发射面的下方,以限制所述雷达发出的超声波向下发射和接收回波的范围;及
摄像头,组装于所述壳体内,对应所述视窗的位置,用于采集车辆的车辆信息。
可选的,所述束波面部分位于所述发射面的左右相对两侧。
可选的,所述雷达束波结构包括腔体,所述雷达部分位于所述腔体内,所述腔体通过所述第一开口与所述凹陷部连通,所述凹陷部的内表面包括过渡面,所述过渡面连接所述腔体的边缘与所述束波面的边缘,所述过渡面从所述第一开口的边缘径向向外延伸。
可选的,所述过渡面为平面;或所述过渡面为曲面。
可选的,所述第一面在从所述第一开口向所述第二开口的方向上逐渐径向向外扩大。
可选的,所述第一面是旋转曲面,所述旋转曲面的旋转轴为所述发射面的中心线,所述旋转曲面的母线为抛物线的一部分,所述抛物线的焦点为所述发射面的外边沿的一个点。
可选的,所述抛物线是根据所述雷达发射出的超声波的角度、所述抛物线的焦点的位置,以及所述抛物线和所述发射面的直径所在直线相交的点确定的,该直线经过所述焦点。
可选的,所述束波面包括与所述第一面在所述凹陷部的周向上连接的第二面,所述第二面为平面,所述第二面设置于所述发射面的上侧;和/或
所述发射面的边缘与所述第一开口的边缘之间存在间隙;和/或
所述凹陷部的内表面为光面;和/或
所述雷达束波结构为金属材质;和/或
所述凹陷部包括泄水槽,所述泄水槽设置于所述第一面,所述泄水槽与所述第二开口连通,所述泄水槽的深度在所述第二开口至所述第一开口的方向上逐渐减小。
可选的,所述第二开口的边沿包括相对的上边沿和下边沿,在水平方向上所述上边沿相对于所述下边沿向所述凹陷部外凸出。
可选的,所述上边沿为圆弧状。
可选的,所述雷达的所述发射面的中心线向所述壳体外的方向上向上倾斜;和/或
所述壳体包括上下方向延伸的安装面,所述安装面用于固定安装于路缘。
本申请还提供一种摄像机装置,其中包括:
第一壳体;
摄像头,所述摄像头设置在所述第一壳体内部;
雷达组件,所述雷达组件中部分组件设置在所述第一壳体内部且其余组件设置在所述第一壳体外部;
雷达束波组件,所述雷达束波组件包括第二壳体和朝向所述第二壳体内部延伸的束波敞口;
其中,所述雷达组件中其余组件设置在所述第二壳体内部,所述雷达组件经由所述束波敞口发射和接收反射超声波;
其中,所述束波敞口包括内壁面,所述内壁面限定为由预设的抛物线段以第一轴线旋转得到,所述第一轴线与所述摄像头的光轴构成锐角。
可选的,在所述摄像机装置被固定安装在车位场景时,所述摄像头的水平视野与所述雷达组件发射的超声波水平覆盖范围至少部分重合,以使雷达组件检测到车辆后,摄像头被唤醒进行工作。
可选的,所述束波敞口包括第一开口和第二开口,所述第一开口径向尺寸小于所述第二开口的径向尺寸,以使所述束波敞口呈现喇叭状。
可选的,所述雷达束波组件还包括连接所述内壁面的端面,所述端面是沿着所述束波敞口中所述第一开口径向延伸得到,以使所述端面径向尺寸大于所述第一开口的径向尺寸,进而使得所述雷达组件在车位监控环境下发生振动时,所述雷达组件经由所述雷达束波组件作用后的超声波发射范围和接收范围不受影响。
可选的,所述预设抛物线满足:所述预设抛物线段的起点被设置在所述端面的边缘点,所述预设抛物线段的终点由所述雷达组件中超声波发射点和与所述第一轴线具有第一夹角的斜率构成的直线在距离所述端面L处的点确定,其中所述第一夹角唯一限定了所述超声波水平覆盖范围。
本申请提供的车位检测装置包括雷达束波结构和雷达,雷达束波结构包括第一开口、第二开口和第一面,第一面为从第一开口向第二开口的方向弯曲延伸的曲面,且至少部分位于发射面的下方,以限制雷达发出的超声波向下发射和接收回波的范围,如此可以避免出现雷达探地的情况,从而降低误判的情况,提高检测准确度。
应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
附图说明
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本申请的实施例,并与说明书一起用于解释本申请的原理。
图1所示为本申请一示例性实施例的车位检测装置的局部爆炸图;
图2所示为图1所示的车位检测装置安装后的结构示意图;
图3所示为图1所示的车位检测装置的另一角度的局部爆炸图;
图4所示为图1所示的车位检测装置的雷达和雷达束波结构部分的放大图;
图5所示为图4所示的车位检测装置的雷达束波结构安装雷达后沿A-A线的剖视图;
图6所示为图1所示的车位检测装置的雷达束波结构在坐标系中的示意图;
图7所示为图1所示的车位检测装置的局部俯视图;
图8所示为图1所示的车位检测装置的局部主视图;
图9所示为图1所示的车位检测装置的俯视图。
具体实施方式
这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本申请相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本申请的一些方面相一致的装置和方法的例子。
在本申请使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本申请。除非另作定义,本申请使用的技术术语或者科学术语应当为本申请所属领域内具有一般技能的人士所理解的通常意义。本申请说明书以及权利要求书中使用的“第一”“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。同样,“一个”或者“一”等类似词语也不表示数量限制,而是表示存在至少一个。“多个”或者“若干”表示两个及两个以上。除非另行指出,“前部”、“后部”、“下部”和/或“上部”等类似词语只是为了便于说明,而并非限于一个位置或者一种空间定向。“包括”或者“包含”等类似词语意指出现在“包括”或者“包含”前面的元件或者物件涵盖出现在“包括”或者“包含”后面列举的元件或者物件及其等同,并不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而且可以包括电性的连接,不管是直接的还是间接的。
在本申请使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本申请。在本申请和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
本申请提供一种车位检测装置。下面结合附图,对本申请的车位检测装置进行详细说明。在不冲突的情况下,下述的实施例及实施方式中的特征可以相互组合。
车位检测装置是设置于路缘或路面转角处的摄像机,对车辆的车牌区域进行抓拍,可以应用于停车场等需要记录车辆停靠和离开信息的场景中。下文所述的雷达探地现象是由于雷达发出的超声波射到地面,从地面形成反射波返回,且该反射波强度大于车辆的反射波的强度,雷达根据地面反射波而产生表示探测距离的探测数据,该探测数据失效,导致误判,检测存在误差。雷达探路侧现象同理,雷达发出的超声波射到高出路面的路牙,雷达接收路牙反射的反射波,该反射波强度大于车辆的反射波的强度,雷达根据该反射波产生探测数据,该探测数据失效,导致误判,检测存在误差。
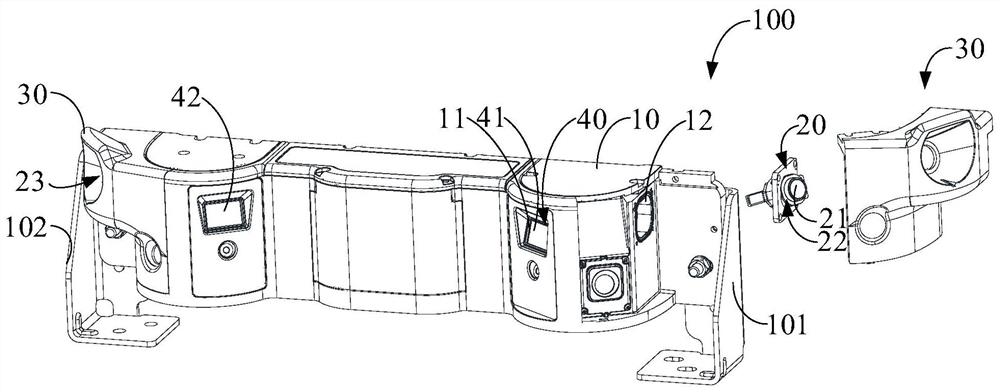
图1所示为本申请一示例性实施例的车位检测装置100的局部爆炸图;
图2所示为图1所示的车位检测装置100安装后的结构示意图。
参见图1所示,本申请的实施例提供一种车位检测装置100,包括壳体10、雷达20、雷达束波结构30和摄像头40。
壳体10包括雷达安装孔12和视窗11,雷达安装孔12自壳体10外表面向内凹陷,用于安装雷达20,摄像头40对应视窗11安装,视窗11可以允许光线进入摄像头40。雷达20组装于所述雷达安装孔12,用于检测车辆的状态,当雷达20检测到车辆停靠或离开时,唤醒车位检测装置100,并使用对应的摄像头40对车辆进行拍照,拍照结束后,设备将图片发送到管理后台,完成信息的采集。在本实施例中,所述车位检测装置100包括沿水平方向相对设置的第一侧101和第二侧102。雷达20包括第一雷达22和第二雷达23。第一雷达22设置于第一侧101,第二雷达23设置于第二侧102。第一雷达22和第二雷达23朝向相反的方向。设置第一雷达22和第二雷达23,可以探测两个方向上车辆的状态,可以检测相邻两个车位的车辆状态,集成度高,成本低,停车场可以设置较少的车位检测装置100。雷达20包括发射面21,雷达20的发射面21为雷达20发出超声波的最外侧的端面,雷达20产生的超声波透过发射面21向外发射,且外界的回波穿过发射面21被雷达20接收。第一雷达22的发射面21背向第二侧102,第二雷达23的发射面21背向第一侧101。在一个实施例中,所述雷达20可为倒车雷达。在一些实施例中,所述雷达20的所述发射面21的中心线向所述壳体10外的方向上向上倾斜,当车位检测装置100的高度很低或雷达20的安装位置较低时,可以配合雷达束波结构30,防止雷达探地、探路侧的现象产生,使得雷达20可以更精准的定位车辆。
参见图1和图2所示,摄像头40组装于壳体10内,对应视窗11的位置,用于采集车辆的车辆信息,例如拍摄车牌。在本实施例中,摄像头40包括第一摄像头41和第二摄像头42,第一摄像头41和第二摄像头42朝向不同的方向。第一摄像头41相对于第二侧102靠近第一侧101,第二摄像头42相对于第一侧101靠近第二侧102。第一摄像头41背向第一雷达22,朝向第二侧102。第二摄像头42背向第二雷达23,朝向第一侧101。第一摄像头41和第二摄像头42位于第一雷达22和第二雷达23之间。第一摄像头41捕捉一侧车辆车尾60的车牌,所述第二摄像头42捕捉一侧车辆车头70的车牌。当第一雷达22检测到车辆停靠或离开的动态时,第二摄像头42对车头70的车牌进行拍照,当第二雷达23检测到车辆停靠或离开的动态时,第一摄像头41对车尾60的车牌进行拍照。第一摄像头41和第二摄像头42可以同时进行拍照。车位检测装置100的集成度高。
图3所示为图1所示的车位检测装置100的另一角度的局部爆炸图。参见图2和图3所示,在一些实施例中,所述壳体10包括上下方向延伸的安装面13,所述安装面13用于固定安装于路缘50,所述雷达20的发射面21的中心线的延长线与所述安装面13相交,使雷达20朝向车辆的方向,便于雷达20对车辆的检测。车位检测装置100与车辆的相对位置不同,雷达20的朝向不同,雷达束波结构30的安装位置不同。
图4所示为图1所示的车位检测装置100的雷达20和雷达束波结构30的放大图。参见图3和图4所示,车位检测装置100还包括雷达束波结构30,雷达束波结构30固定于车位检测装置100的两侧,对应雷达20的位置安装。在本实施例中,雷达束波结构30与所述壳体10通过螺栓固定。在其他一些实施例中,雷达束波结构30可以通过粘胶等方式固定于壳体10。雷达束波结构30包括主体部31和从所述主体部31的外表面向内凹陷的凹陷部32,所述主体部31固定于所述壳体10,主体部31可以凸出壳体10。在本实施例中,主体部31自内壁凸出设置有连接部313,连接部313外表面设有沉头孔315。主体部31可以通过螺栓314与壳体10固定,螺栓314安装后陷入沉头孔315中,防止螺栓314因外部碰撞而松脱。在其他一些实施例中,主体部31也可以通过粘胶等方式固定于壳体10,本申请不做限制。
凹陷部32设于主体部31,凹陷部32凸出壳体10。所述凹陷部32包括相对的第一开口321和第二开口322,所述雷达20对应所述凹陷部32设置。发射面21位于第一开口321。在本实施例中,发射面21正对第一开口321,凹陷部32可以为对称结构,便于凹陷部32的加工。第一开口321可以是圆形,便于容纳雷达20的发射面。第二开口322相对于第一开口321远离雷达20,且所述第二开口322大于所述第一开口321。所述凹陷部32的内表面包括从所述第一开口321向所述第二开口322的方向延伸的束波面323,所述束波面323包括第一面3231,所述第一面3231为从所述第一开口321向所述第二开口322的方向弯曲延伸的曲面,且至少部分位于所述发射面21的下方,以限制雷达20发出的超声波向下发射和接收回波的范围。从发射面21射出的超声波通过第一开口321,穿过凹陷部32,从第二开口322向外发射,以向停放车辆的车位方向发射。
在一些实施例中,所述凹陷部32的内表面为光面,可以减少由于超声波漫反射造成的误判情况的发生,同时设置为光面表面光滑不易积累泥沙,方便清洁。
雷达20位于地面上方,距离地面有一定的距离。在发射面21的下方约束雷达20发出的超声波和约束接收回波的范围,如此可以避免出现雷达探地的情况,从而降低误判,提高检测准确度。第一面3231在第一开口321的周向上也可为曲面。束波面323可以是凹陷部32的内表面的一部分。在一些实施例中,束波面323可以环绕第一开口321和第二开口322,以限制雷达发出的超声波在各个方向上的发射角度,提高雷达探测的准确性。第一面3231可以是束波面323的一部分。第一面3231可以是束波面323位于发射面21的下方的部分。凹陷部32大致呈喇叭状,从第一开口321向第二开口322的方向上逐渐向外扩张。在一些实施例中,第一面3231在从第一开口321向第二开口322的方向上逐渐径向向外扩大,可以使得雷达20更好的发射和接收超声波。
在一些实施例中,壳体包括相对的正面和背面,所述正面设有所述视窗,所述第一面部分位于所述发射面的靠近所述背面的一侧。如此,可以限制超声波水平方向上向壳体的背面发射的发射角度,防止雷达探路侧的情况产生,从而提高雷达检测的准确性。在一些实施例中,第一面3231部分位于所述发射面21靠近正面和靠近背面的相对两侧,即发射面21的左右相对两侧,可以限制超声波水平方向上的发射角度,使超声波主要向车辆的方向发射。第一面3231可以位于发射面21的下方和左右两侧,围绕发射面21的下方和左右两侧延伸。
在一些实施例中,所述束波面323包括与所述第一面3231在所述凹陷部32的周向上连接的第二面3232,所述第二面3232为平面,所述第二面3232设置于所述发射面21的上侧,在不影响雷达20垂直方向上超声波的反射与接收的前提下,可以减小车位检测装置100垂直方向的高度,节约空间。在本实施例中,所述第二面3232为自所述第一开口321至所述第二开口322向远离所述发射面21的中心线方向倾斜的倾斜平面,如此设计对雷达20垂直方向上超声波的反射与接收的影响更小。
参见图4所示,在一些实施例中,所述雷达束波结构30包括腔体33,所述雷达20部分位于所述腔体33内,所述腔体33通过所述第一开口321与所述凹陷部32连通。腔体33连通壳体10内部和凹陷部32,收容雷达20。所述凹陷部32的内表面包括过渡面324,所述过渡面324连接所述腔体33的边缘与所述束波面323的边缘,所述过渡面324从所述第一开口321的边缘径向向外延伸。雷达20发射出的超声波可以被束波面323反射,设置过渡面324可以有效减少束波面323反射的被雷达20接受的超声波,减少异常回波进入到雷达20。在其他实施例中,壳体10包括腔体33,所述腔体33通过所述第一开口321与所述凹陷部32连通。所述腔体33可以设置于壳体10上也可以设置于雷达束波结构30上,本申请不做限制。
在一些实施例中,所述过渡面324为平面,所述过渡面324可以与所述发射面21平行或向第一开口321的方向远离所述凹陷部32的方向倾斜。在本实施例中,所述过渡面324与所述发射面21平行,所述过渡面324的宽度为3mm,此时经过测试对异常回波进入到雷达发射面21的效果最佳。在其他实施例中,所述过渡面324也可以是曲面,可以与第一面3231衔接过渡得较好,便于加工成型凹陷部32。过渡面324可以从第一开口321向第二开口322的方向弯曲延伸,且向远离第一开口321的方向上逐渐向外扩张。过渡面324在从第一开口321向第二开口322的方向上的曲度和第一面3231从第一开口321向第二开口322的方向上的曲度不同。过渡面324可以与第一面3231平滑过渡。
在一些实施例中,所述凹陷部32包括泄水槽325,所述泄水槽325设置于所述第一面3231,所述泄水槽325与所述第二开口322连通。所述泄水槽325的深度在所述第二开口322至所述第一开口321的方向上逐渐减小,使得水更便于通过泄水槽325排出雷达束波结构30,避免积水存留在雷达束波结构30表面上对雷达20超声波的发射和接受产生影响。在本实施例中,所述泄水槽325设置于所述凹陷部32的正下方,便于积水的排出。泄水槽325向第二开口322的方向向下倾斜,且与第一开口321具有一定的距离。
在一些实施例中,所述第二开口322的边沿包括相对的上边沿3221和下边沿3222,在水平方向上所述上边沿3221相对于所述下边沿3222向所述凹陷部32外凸出,可以对束波面323起到一定的遮挡作用,防止落叶等异物附着在下边沿3222或束波面323上,对雷达20发出超声波和接收回波产生影响。上边沿3221位于发射面21的上方,位于第二面3232的边缘,下边沿3222位于发射面21的下方,位于第一面3231的边缘。在一些实施例中,所述上边沿3221为圆弧状,可以减轻在车辆误碰撞时对车辆轮胎和轮毂造成的损害。
在一些实施例中,所述雷达束波结构30为金属材质,具有一定的结构强度,可以避免受到外部冲击而造成结构变形。第一雷达22和第二雷达23分别对应一个雷达束波结构30,两雷达束波结构30可以相同或不同。
图5所示为图4所示的车位检测装置100的雷达束波结构30安装雷达20后沿A-A线的剖视图。
参见图4和图5所示,在一些实施例中,所述发射面21的边缘与所述第一开口321的边缘之间存在间隙。第一开口321的开口大小大于发射面21的大小,当雷达束波结构30在受到外力而产生振动时,由于雷达束波结构30与雷达20之间存在间隙,雷达束波结构30的振动对雷达20本身不会产生影响。
在一些实施例中,所述第一面3231是旋转曲面,所述旋转曲面的旋转轴为所述发射面21的中心线s,所述旋转曲面的母线为抛物线的一部分,所述抛物线的焦点为所述发射面21的外边沿的一个点,当旋转曲线的母线为抛物线的一部分时,抛物线的形状可以更好的实现防止雷达探地和雷达探路侧的功能,使得雷达20检测的准确性更高。
在本实施例中,所述焦点包括第一焦点a和第二焦点b,所述第一焦点a与所述第二焦点b是发射面21径向相对的两个点,所述第一面3231包括第一部分,所述抛物线包括第一抛物线P1,所述第一部分的母线为第一抛物线P1的一部分,所述第一部分的焦点为第一焦点a。
通过下文所述方式得到第一抛物线P1:设定θ为所述雷达20发射出的超声波的角度的一半,从第一焦点a以θ为角度划线得到线a1,从第二焦点b以θ为角度划线得到线b1,可知线a1和线b1相对于发射面21的中心线s对称。以第一焦点a做线a2平行于b1,第一焦点a为第一抛物线P1的焦点,线a2为第一抛物线P1的中心线,A点为结构的已知点,可以根据对过渡面324的要求和设计得出,通过上述数据可求得第一抛物线P1。P1与线a1交点为A1,A1到所述发射面21的距离为第一开口321至所述第二开口322的有效距离,A1到所述发射面21的距离不同会对束波面323的束波作用强度产生影响,所述第一面3231为旋转曲面,所述第一抛物线P1绕中心线s旋转可以得到所述第一面3231。以上述方式制作的第一面3231可以在保证实现雷达束波效果的同时,节省加工成本及时间,便于生产。
因此,所述抛物线是根据所述雷达20发射出的超声波的角度、所述抛物线的焦点的位置,以及所述抛物线和所述发射面21的直径所在直线相交的点确定的,该直线经过所述焦点。
图6所示为图1所示的车位检测装置100的雷达束波结构30在坐标系中的示意图。
参见图6所示,在一些实施例中,在以所述雷达20的所述发射面21的中心为原点、以所述发射面21的直径方向为x轴的直角坐标系中,所述抛物线f(x,y)满足:
其中变量c满足:
上文中所述的θ为所述雷达20发射出的超声波的角度的一半,(fx,0)为所述抛物线的焦点坐标,(x
图7所示为图1所示的车位检测装置100的局部俯视图;图8所示为图1所示的车位检测装置100的局部主视图;图9所示为图1所示的车位检测装置100的俯视图。
参见图1、图7、图8和图9所示,在本实施例中,摄像头40水平方向的视角角度为k,可以将车辆的车牌完全覆盖。同时,通过设备与车辆的位置关系可以得到,雷达20通过雷达束波结构30发射出的超声波水平方向的角度e=45°,垂直方向的角度f=30°,所述雷达20的发射面21的中心线与地面的夹角g=19°,雷达20的发射面21的中心线的延长线与所述安装面13的夹角d=30°,所述发射面21靠近地面的一端距离地面的高度h=12cm。在控制逻辑与雷达20单体不同的情况下,所述数值会产生相应的变化。
本申请还提供一种摄像机装置100(相当于车位检测装置),摄像机装置100包括第一壳体10(相当于壳体)、雷达组件20(相当于雷达)、雷达束波组件30(相当于雷达束波结构)、摄像头40。
第一壳体10起到保护摄像头及雷达组件的作用。其中,摄像头40设置在第一壳体10内部,雷达组件20中部分组件设置在第一壳体10内部且其余组件设置在第一壳体10外部。
雷达束波组件30包括第二壳体31(相当于主体部)和朝向第二壳体内部延伸的束波敞口32(相当于凹陷部)。其中,雷达组件20中其余组件设置在第二壳体31内部,雷达组件20经由束波敞口32发射和接收反射超声波。
束波敞口32包括内壁面3231(相当于第一面),内壁面3231限定为由预设的抛物线段(相当于第一抛物线P1)以第一轴线s(相当于上文所述的中心线s)旋转得到,可以限制雷达组件20发出的超声波发射和接收回波的范围。第一轴线s与摄像头40的光轴构成锐角,可以将摄像头40与雷达束波组件30安装在相邻的位置,使得摄像机装置100的空间利用率高,设计更加合理。
在摄像机装置100被固定安装在车位场景时,摄像头40的水平视野与雷达组件20发射的超声波水平覆盖范围至少部分重合,以使雷达组件20检测到车辆后,摄像头40被唤醒进行工作。在本实施例中,当第一雷达22检测到车辆后,唤醒第二摄像头42,第二摄像头42对车头70的车牌进行拍照。
束波敞口32包括第一开口321和第二开口322,所述第一开口321径向尺寸小于所述第二开口322的径向尺寸,以使所述束波敞口32呈现喇叭状,如此不会阻挡雷达组件20发射超声波的范围,也能够更好的实现束波的效果。
雷达束波组件30还包括连接所述内壁面的端面324(相当于过渡面),端面324是沿着所述束波敞口32中所述第一开口321径向延伸得到,以使所述端面324径向尺寸大于所述第一开口321的径向尺寸,进而使得所述雷达组件20在车位监控环境下发生振动时,所述雷达组件20经由所述雷达束波组件30作用后的超声波发射范围和接收范围不受影响。
参见图5所示,所述预设抛物线满足:所述预设抛物线段的起点被设置在端面324的边缘点,所述预设抛物线段的终点由所述雷达组件20中超声波发射点和与所述第一轴线s具有第一夹角θ(相当于上文所述的角θ)的斜率构成的直线在距离所述端面L处的点确定,其中所述第一夹角θ唯一限定了所述超声波水平覆盖范围。
本领域技术人员在考虑说明书及实践这里公开的申请后,将容易想到本申请的其它实施方案。本申请旨在涵盖本申请的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本申请的一般性原理并包括本申请未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本申请的真正范围和精神由下面的权利要求指出。
应当理解的是,本申请并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本申请的范围仅由所附的权利要求来限制。
- 车位检测装置和用于监控车位的具有雷达的摄像机装置
- 一种用于车位识别的雷达模组及车位识别系统