一种机器人自动巡检防误方法、系统、设备及存储介质
文献发布时间:2023-06-19 13:27:45
技术领域
本发明属于机器人巡检领域,涉及一种机器人自动巡检防误方法、系统、设备及存储介质。
背景技术
电能建设,是一个地区建设的基础。电能覆盖到全国的每个角落,由于用电的广泛,导致了变配电站、配电室的数量也是非常多。为了保证人们的用电安全,每间变配电站、配电室都要有工作人员定期检查设备,保证设备的安全。变配电站、配电室是一个高度危险的地方,由人在操作设备难免会产生误差,导致安全事故的发生。为了防止或减少配电室内工作人员操作的误差,通过利用电力巡检机器人来代替人的巡检,能够及时有效的采取配电室内设备的数据,同时提高了工作效率。
电力巡检机器人系统执行电力巡检作业任务时,机器人自主导航到待巡检设备,启动机器人搭载的热成像双光云台,采集指示灯、仪表、开关状态、液晶显示屏、温度等设备信息数据,随后通过智能算法自动判别设备状态是处于正常或异常状态,并对异常状态进行上报。
热成像双光升降云台采集设备图像和温度信息过程中由于移动机器人定位、云台升降、云台转动、摄像机变焦等因素误差,造成采集的设备与系统检测目标设备不一致,造成设备误诊断,影响智能巡检移动机器人在电力系统中巡检可靠性。
发明内容
本发明的目的在于克服上述现有技术的缺点,提供一种机器人自动巡检防误方法、系统、设备及存储介质,保证采集的设备与系统检测目标设备一致,可有效防止设备误诊断。
为达到上述目的,本发明采用以下技术方案予以实现:
一种机器人自动巡检防误方法,包括以下过程:
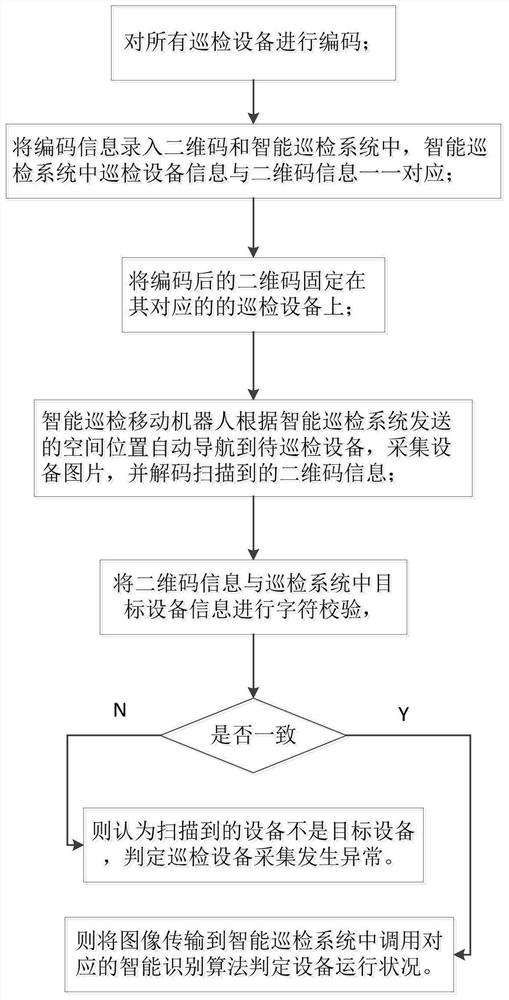
S1,对所有巡检设备进行编码;
S2,将编码信息录入二维码和智能巡检系统中,智能巡检系统中巡检设备信息与二维码信息一一对应;
S3,将编码后的二维码固定在其对应的的巡检设备上;
S4,智能巡检移动机器人根据智能巡检系统发送的空间位置自动导航到待巡检设备,采集设备图片,并解码扫描到的二维码信息;
S5,将二维码信息与巡检系统中目标设备信息进行字符校验,若不一致,则认为扫描到的设备不是目标设备,判定巡检设备采集发生异常;若一致,则将图像传输到智能巡检系统中调用对应的智能识别算法判定设备运行状况。
优选的,S1中,编码信息包括设备唯一的数字编号、设备对应名称或空间位置信息。
进一步,S4中,解码扫描到的二维码信息包括设备数字编号、设备对应名称或空间位置信息。
再进一步,S5中,将二维码中设备数字编号、设备对应名称或间位置信息与巡检系统中目标设备数字编号、设备对应名称或空间位置信息进行字符校验。
进一步,S5完成后,所述智能巡检移动机器人根据当前扫描到的二维码中设备空间位置信息与设定的目标设备空间位置信息计算出的相对空间距离,重新规划运动路线和热成像双光云台参数,重复S4和S5,直到扫描到的设备为目标设备,对设备运行状况作出智能判别后,执行下一次巡检任务。
进一步,S4中,调整热成像双光云台升降、转动和摄像机参数采集设备图片。
再进一步,S5中,判定巡检设备采集发生异常后,上报故障,热成像双光云台升降、转动和摄像机参数回到初始状态。
一种机器人自动巡检防误系统,包括:
编码模块,用于对所有巡检设备进行编码;
信息对应模块,用于将编码信息录入二维码和智能巡检系统中,智能巡检系统中巡检设备信息与二维码信息一一对应;
二维码固定模块,用于将编码后的二维码固定在其对应的的巡检设备上;
二维码信息扫描模块,用于智能巡检移动机器人根据智能巡检系统发送的空间位置自动导航到待巡检设备,采集设备图片,并解码扫描到的二维码信息;
信息判断模块,用于将二维码信息与巡检系统中目标设备信息进行字符校验,若不一致,则认为扫描到的设备不是目标设备,判定巡检设备采集发生异常;若一致,则将图像传输到智能巡检系统中调用对应的智能识别算法判定设备运行状况。
一种计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述任意一项所述机器人自动巡检防误方法的步骤。
一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述任意一项所述机器人自动巡检防误方法的步骤。
与现有技术相比,本发明具有以下有益效果:
本发明通过将设备唯一的数字编号、设备对应名称、空间位置信息进行编码,并将编码信息录入二维码和智能巡检系统中,通过扫描到的二维码信息与巡检系统中的信息进行校验,从而保证采集的设备与系统检测目标设备一致,可有效防止设备误诊断。
附图说明
图1是本发明实施例的方法流程图。
具体实施方式
下面结合附图对本发明做进一步详细描述:
如图1所示,为本发明所述的机器人自动巡检防误方法,包括以下步骤:
(1)对所有巡检设备进行编码,编码信息包括设备唯一的数字编号、设备对应名称或空间位置信息。
(2)将编码信息录入二维码和智能巡检系统中,智能巡检系统中巡检设备信息与二维码信息一一对应。
(3)将编码后的二维码固定在其对应的的巡检设备上。
(4)智能巡检移动机器人根据智能巡检系统发送的空间位置自动导航到待巡检设备,调整热成像双光云台升降、转动和摄像机参数采集设备图片,并解码扫描到的二维码设备数字编号、设备对应名称或空间位置信息。
(5)将二维码中设备数字编号、设备对应名称、空间位置信息与巡检系统中目标设备数字编号、设备对应名称或空间位置信息进行字符校验,若不一致,则认为扫描到的设备不是目标设备,判定巡检设备采集发生异常,并上报故障,热成像双光云台升降、转动和摄像机参数回到初始状态。若一致,则将图像传输到智能巡检系统中调用对应的智能识别算法判定设备运行状况。
(6)智能巡检移动机器人根据当前扫描到的二维码中设备空间位置信息与设定的目标设备空间位置信息计算出的相对空间距离,重新规划运动路线和热成像双光云台参数,重复(4)、(5)步骤,直到扫描到的设备为目标设备,对设备运行状况作出智能判别后,执行下一次巡检任务。
本发明公开了机器人自动巡检防误系统,包括:
编码模块,用于对所有巡检设备进行编码。
信息对应模块,用于将编码信息录入二维码和智能巡检系统中,智能巡检系统中巡检设备信息与二维码信息一一对应。
二维码固定模块,用于将编码后的二维码固定在其对应的的巡检设备上。
二维码信息扫描模块,用于智能巡检移动机器人根据智能巡检系统发送的空间位置自动导航到待巡检设备,采集设备图片,并解码扫描到的二维码信息。
信息判断模块,用于将二维码信息与巡检系统中目标设备信息进行字符校验,若不一致,则认为扫描到的设备不是目标设备,判定巡检设备采集发生异常;若一致,则将图像传输到智能巡检系统中调用对应的智能识别算法判定设备运行状况。
本发明公开了计算机设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上述机器人自动巡检防误方法的步骤。
本发明公开了计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现如上述机器人自动巡检防误方法的步骤。
以上内容仅为说明本发明的技术思想,不能以此限定本发明的保护范围,凡是按照本发明提出的技术思想,在技术方案基础上所做的任何改动,均落入本发明权利要求书的保护范围之内。
- 一种机器人自动巡检防误方法、系统、设备及存储介质
- 一种设备巡检方法、装置、系统、存储介质及巡检机器人