转向系统、异常判定方法以及非暂态存储介质
文献发布时间:2023-06-19 13:27:45
技术领域
本发明涉及被配置成电动地改变操作构件的位置的转向系统、异常判定方法以及非暂态存储介质。
背景技术
在系统具有全部责任的级别3或级别3以上级别的自主车辆驾驶状态下,驾驶员无需负责车辆的操作,甚至无需握持诸如方向盘的操作构件。如果方向盘在自主驾驶期间移动以确保驾驶员前面的宽敞空间,则可以提高驾驶员的舒适度。存在用于在自主驾驶期间将方向盘移动到车辆前侧的回缩区域的技术的提议(例如,参见日本未审查专利申请公开第2017-206153号(JP 2017-206153 A))。
发明内容
在通过电动马达使操作构件移动的情况下,在配置成获取操作构件的位置的传感器中或者在配置成操作操作构件的机构中可能会发生异常。此外,在通过电动马达对操作构件操作时,驾驶员等可能会干扰操作构件。
本发明基于例如现有传感器来实现异常的类型的辨别。
本发明的第一方面涉及转向系统。转向系统包括第一操作装置、第二操作装置和判定器。第一操作装置包括第一移位机构、第一电驱动源和第一检测器。第一移位机构被配置成改变由驾驶员操作的操作构件的位置。第一电驱动源被配置成操作第一移位机构。第一检测器被配置成检测第一位置信息,所述第一位置信息指示基于第一移位机构的、操作构件的位置。第二操作装置包括第二移位机构、第二电驱动源和第二检测器。第二移位机构与第一移位机构不同。第二电驱动源被配置成操作第二移位机构。第二检测器被配置成检测第二位置信息,所述第二位置信息指示基于第二移位机构的、操作构件的位置。判定器被配置成当判定器基于与第一操作装置的操作相关的第一操作信息判定第一操作装置具有异常并且基于与第二操作装置的操作相关的第二操作信息判定第二操作装置具有异常时,判定第一操作装置和第二操作装置没有发生故障。
本发明的第二方面涉及用于转向系统的异常判定方法。转向系统包括第一操作装置、第二操作装置和判定器。第一操作装置包括第一移位机构、第一电驱动源和第一检测器。第一移位机构被配置成改变由驾驶员操作的操作构件的位置。第一电驱动源被配置成操作第一移位机构。第一检测器被配置成检测第一位置信息,所述第一位置信息指示基于第一移位机构的、操作构件的位置。第二操作装置包括第二移位机构、第二电驱动源和第二检测器。第二移位机构与第一移位机构不同。第二电驱动源被配置成操作第二移位机构。第二检测器被配置成检测第二位置信息,所述第二位置信息指示基于第二移位机构的、操作构件的位置。异常判定方法包括:当判定器基于与第一操作装置的操作相关的第一操作信息判定第一操作装置具有异常并且基于与第二操作装置的操作相关的第二操作信息判定第二操作装置具有异常时,由判定器判定第一操作装置和第二操作装置没有发生故障。
本发明的第三方面涉及存储指令的非暂态存储介质,所述指令能够由一个或更多个处理器执行并且使所述一个或更多个处理器执行以下功能。该功能包括:当基于与第一操作装置的操作相关的第一操作信息做出第一操作装置具有异常的判定并且基于与第二操作装置的操作相关的第二操作信息做出第二操作装置具有异常的判定时,判定第一操作装置和第二操作装置没有发生故障。第一操作装置包括第一移位机构、第一电驱动源和第一检测器。第一移位机构被配置成改变由驾驶员操作的操作构件的位置。第一电驱动源被配置成操作第一移位机构。第一检测器被配置成检测第一位置信息,所述第一位置信息指示基于第一移位机构的、操作构件的位置。第二操作装置包括第二移位机构、第二电驱动源和第二检测器。第二移位机构与第一移位机构不同。第二电驱动源被配置成操作第二移位机构。第二检测器被配置成检测第二位置信息,所述第二位置信息指示基于第二移位机构的、操作构件的位置。
根据以上描述的配置,可以基于来自例如针对操作构件的操作所使用的传感器的信息来适当地辨别已经发生的异常。
附图说明
下面将参照附图描述本发明的示例性实施方式的特征、优点以及技术和工业意义,其中类似的附图标记表示类似的元件,并且在附图中:
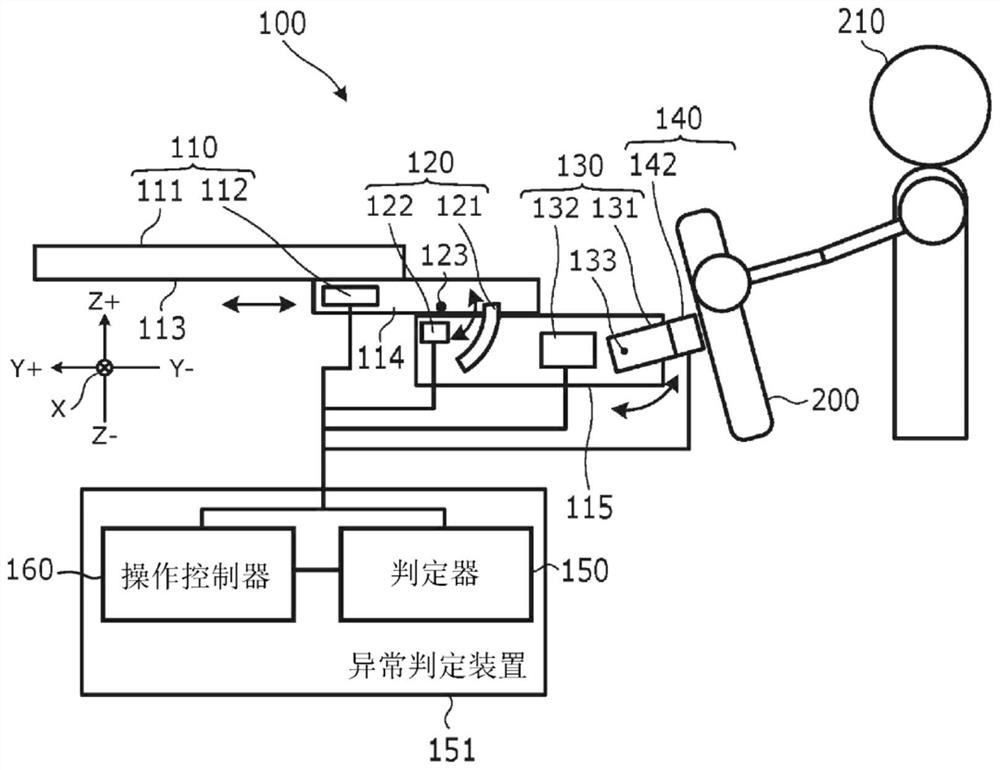
图1是示出转向系统的功能配置的框图;
图2是示出移动操作构件的各个阶段的示意图;
图3是结合地示出异常操作和正常操作的曲线图;
图4是示出判定移位机构具有异常的状态的曲线图;
图5是示出转向系统中异常位置(abnormal site)的辨别流程的流程图;
图6是示出转向系统中异常位置的辨别流程的第一其他过程的流程图;以及
图7是示出转向系统中异常位置的辨别流程的第二其他过程的流程图。
具体实施方式
以下参照附图描述根据本发明的实施方式的转向系统、异常判定方法以及非暂态存储介质。在以下实施方式中描述的数值、形状、材料、组成元素、组成元素间的位置关系和连接状态、步骤和步骤的顺序等是示例,而不旨在限制本发明。虽然以下可以将多个发明描述为一个实施方式,但是未在任何权利要求中描述的组成元素被描述为根据该权利要求的发明的可选组成元素。附图是其中对象被适当地强调、省略或按照其比例进行调整以展示本发明的示意图。因此,形状、位置关系和比例可能与实际的形状、位置关系和比例不同。
图1是示出转向系统的功能配置的框图。转向系统100被配置成使得用于使包括转向系统100的车辆的转向轮转弯的操作构件200相对于驾驶员210是可移动的。转向系统100包括第一操作装置110、第二操作装置120和判定器150。在该实施方式中,转向系统100用作所谓的线控转向(steer-by-wire,SBW)系统,其中操作构件200未机械地连接至车辆的转向轮,并且转向轮基于指示操作构件200的操作量的信号来转弯。转向系统100包括第三操作装置130、第四操作装置140和操作控制器160。通过使作为计算机的异常判定装置151执行程序来实现判定器150和操作控制器160。
操作构件200由驾驶员210操作以使包括转向系统100的车辆的转向轮转弯。操作构件200的形状没有特别限制。在该实施方式中,使用称为“方向盘”的环形构件作为操作构件200,但是操作构件200可以具有矩形环状形状或杆状形状。
第一操作装置110沿一个预定方向(图1中的Y轴方向)改变由驾驶员210操作的操作构件200的位置。第一操作装置110包括第一移位机构111、第一电驱动源112和第一检测器(未示出)。
第一移位机构111是被配置成改变由驾驶员210操作的操作构件200的位置的机构中的一个。在该实施方式中,第一移位机构111是配置成使操作构件200如图1和图2中所示向车辆的前侧(图1和图2中的“Y+”侧)或车辆的后侧(图1和图2中的“Y-”侧)移动的前进与后退机构。第一移位机构111包括具有多个级的可伸缩机构。具体地,第一移位机构111包括基轨113、中间可移动体114和末端可移动体115。基轨113固定至车辆。沿着基轨113引导中间可移动体114在车辆的前后方向上移动。沿着中间可移动体114引导末端可移动体115在车辆的前后方向上移动。第一移位机构111可以使操作构件200朝着驾驶员210前进,并且可以使操作构件200朝着车辆的仪表板220后退。包括转向系统100的车辆是其中系统可以在特定位置执行整体操作的自主车辆。如图2的下面的图中所示,第一移位机构111可以使操作构件200回退到仪表板220中。第一移位机构111本身也可以收缩到仪表板220中。
第一电驱动源112产生用于操作第一移位机构111的驱动力。在该实施方式中,第一电驱动源112是三相无刷马达,其是被配置成通过从逆变器供应的脉冲电力来旋转的电动马达。第一电驱动源112附接至中间可移动体114。第一电驱动源112产生中间可移动体114相对于基轨113的推进力以及末端可移动体115相对于中间可移动体114的推进力。第一电驱动源112的附接位置没有特别限制。可以提供多个第一电驱动源112以独立地驱动中间可移动体114和末端可移动体115。
第一检测器检测第一位置信息,第一位置信息指示基于第一移位机构111的、操作构件200的位置。第一检测器的类型没有特别限制。在该实施方式中,第一检测器是设置在第一电驱动源112上并且检测第一电驱动源112的旋转角的诸如旋转编码器或解析器(resolver)的旋转角检测器。第一检测器可以是附接至第一移位机构111的线性编码器等。如果存在多个第一电驱动源112,则第一检测器可以获取中间可移动体114和末端可移动体115的位置,并且将那些检测结果检测为指示操作构件200的位置的第一位置信息。
第二操作装置120沿与第一操作装置110不同的方向改变操作构件200的位置。第二操作装置120包括第二移位机构121、第二电驱动源122和第二检测器(未示出)。
第二移位机构121沿与第一移位机构111不同的方向改变操作构件200的位置。在该实施方式中,第二移位机构121是所谓的倾斜机构,其被配置成通过使末端可移动体115围绕沿车辆的宽度方向(图1和图2中的X轴方向)延伸的第一旋转轴123相对于中间可移动体114旋转来使操作构件200相对于驾驶员210向上或向下移动。
第二电驱动源122产生用于操作第二移位机构121的驱动力。在该实施方式中,第二电驱动源122是三相无刷马达。第二电驱动源122附接至末端可移动体115。第二电驱动源122可以附接至中间可移动体114。
第二检测器检测第二位置信息,第二位置信息指示基于第二移位机构121的、操作构件200的位置。第二检测器的类型没有特别限制。在该实施方式中,第二检测器的类型与第一检测器的类型相同。
第三操作装置130沿与第一操作装置110和第二操作装置120不同的方向改变操作构件200的位置。第三操作装置130包括第三移位机构131、第三电驱动源132和第三检测器(未示出)。
第三移位机构131沿与第一移位机构111和第二移位机构121不同的方向改变操作构件200的位置。在该实施方式中,第三移位机构131通过使操作构件200围绕沿与操作构件200的旋转方向相交的方向——即沿车辆的宽度方向(图1和图2中的X轴方向)——延伸的旋转轴133相对于第一移位机构111的末端可移动体115旋转,将操作构件200的位置改变至操作构件200容易被容纳在仪表板220中的位置。
第三电驱动源132产生用于操作第三移位机构131的驱动力。在该实施方式中,第三电驱动源132是三相无刷马达。
第三检测器检测第三位置信息,第三位置信息指示基于第三移位机构131的、操作构件200的位置。第三检测器的类型没有特别限制。在该实施方式中,第三检测器的类型与第一检测器的类型相同。
第四操作装置140沿与第一操作装置110、第二操作装置120和第三操作装置130不同的方向改变操作构件200的位置(姿态)。第四操作装置140包括第四移位机构(未示出)、第四电驱动源142和第四检测器(未示出)。
第四移位机构包括旋转轴和轴承。旋转轴将操作构件200耦接至第四电驱动源142,使得操作构件200是可旋转的。轴承支持旋转轴使得旋转轴是可旋转的。由于操作构件200具有环形形状,因此第四移位机构随着操作构件200的位置而改变操作构件200的姿态,即操作构件200围绕旋转轴的旋转角。
第四电驱动源142是被配置成产生用于使操作构件200围绕旋转轴旋转的驱动力的所谓的反作用力马达。在该实施方式中,第四电驱动源142是三相无刷马达。例如,第四电驱动源142针对由驾驶员210施加至操作构件200的操作扭矩产生用于再现机械转向感觉的扭矩。此外,第四电驱动源142将操作构件200旋转成适合于壳体的姿态。
第四检测器检测第四位置信息,第四位置信息指示基于第四移位机构的、操作构件200的位置(姿态)。第四检测器的类型没有特别限制。第四检测器可以包括被配置成检测第四电驱动源142的旋转角的旋转角检测器、被配置成检测操作构件200的旋转角的旋转角检测器以及被配置成检测输入至操作构件200的扭矩的扭矩传感器中的至少一个。
判定器150是处理器,其被配置成:当判定器150基于与第一操作装置110的操作相关的第一操作信息判定第一操作装置110具有异常并且基于与第二操作装置120的操作相关的第二操作信息判定第二操作装置120具有异常时,判定第一操作装置110和第二操作装置120没有发生故障。
由判定器150获取的第一操作信息没有特别限制,只要该信息与例如第一操作装置110的操作相关即可。第一操作信息包含用于操作第一电驱动源112的第一驱动信息以及从第一检测器获取的第一位置信息中的至少一个。例如,第一驱动信息包含用于被配置成向第一电驱动源112供应电力的第一逆变器的第一命令值以及被供应至第一电驱动源112的第一实际电力值中的至少一个。例如,通过使用被供应至第一电驱动源112的实际电流值、实际电压值和占空比中的至少一个来表示第一实际电力值。
第二操作信息没有特别限制,只要该信息与例如第二操作装置120的操作相关即可。第二操作信息包含用于操作第二电驱动源122的第二驱动信息以及从第二检测器获取的第二位置信息中的至少一个。例如,第二驱动信息包含用于被配置成向第二电驱动源122供应电力的第二逆变器的第二命令值以及被供应至第二电驱动源122的第二实际电力值中的至少一个。第三操作信息和第四操作信息类似于第二操作信息。
判定器150的判定方法没有特别限制。例如,当第一位置信息指示不是预定正常操作(图3中的双点划线(long dashed double-short dashed line))的异常操作(图3中的实线)时,判定器150判定第一操作装置110具有异常。具体地,当由第一位置信息指示的操作构件的移位落入包括基本恒定值的预定范围内持续达预定时间段时,判定器150判定第一操作装置110具有异常。
当第一位置信息落入预定范围内持续达预定时间段并且第一操作信息中包含的第一驱动信息不指示异常时,判定器150可以判定第一检测器具有异常。第一驱动信息不指示异常的情况的示例包括向被配置成将电力供应至第一电驱动源112的第一逆变器供应第一命令值(指示电流值)而供应至第一电驱动源112的第一实际电力值(实际电流值)不遵循第一命令值的情况。具体地,判定器150获取第一命令值与第一实际电力值之间的差,并且基于第二阈值进行判定。当该差等于或大于第二阈值时,判定器150判定第一检测器具有异常。如图4中由虚线所示,当第一命令值与第一实际电力值之间的差并不等于或大于第二阈值并且第一实际电力值持续地增加并超过为第一实际电力值设置的第一阈值时,判定器150判定第一操作装置110的操作具有异常。
判定器150可以通过类似的判定方法来判定在第二操作装置120、第三操作装置130和第四操作装置140中是否发生异常。在各个操作装置中,用于判定是否发生异常的阈值等彼此不同。
操作控制器160是处理器,其被配置成使第二操作装置120、第三操作装置130和第四操作装置140中的至少一个执行预定操作,以通过判定器150对第一操作装置110的操作是否具有异常进行判定。第二操作装置120、第三操作装置130和第四操作装置140不与第一操作装置110的操作相关联地操作。例如,当第二操作装置120停止时,操作控制器160使第二操作装置120执行作为预定操作的以预定行程振动的操作。操作控制器160可以使另一操作装置在第一操作装置110中发生异常之后操作,或者对于异常判定,可以使另一操作装置在异常发生之前操作。
判定器150通过获取在操作控制器160的控制下执行了预定操作的第二操作装置120的第二操作信息来判定第二操作装置120是否具有异常。操作控制器160可以使每个操作装置在操作装置处于正常状态时执行预定操作,并且判定器150可以获取并存储正常状态下的操作信息。判定器150可以基于存储的正常状态下的操作信息来判定是否发生异常。
图5是示出转向系统中异常位置的辨别流程的流程图。在该实施方式中,给出通过使用第二操作装置120来辨别第一操作装置110的异常位置的情况的描述。对经受判定的操作装置和用于判定的操作装置没有限制。
第一操作装置110响应于接收到用于将操作构件200移位至预定位置的第一操作命令而开始操作(S101)。在第一操作装置110的操作期间,判定器150通过监测从第一检测器输出的第一位置信息来判定是否发生异常(S102)。当操作构件200到达目标位置而无异常时,处理结束(S103)。
当判定器150在步骤S102中判定第一操作装置110具有异常时(S102:是),判定器150判定是否有必要操作作为另一装置的第二操作装置120以获取第二操作信息(S104)。当判定器150判定第二操作装置120需要执行预定操作时(S104:是),操作控制器160控制第二操作装置120执行预定操作(S105)。
判定器150基于第二操作信息判定第二操作装置120是否具有异常(S106)。当第二操作装置120具有异常时(S106:是),判定器150判定驾驶员210或者任何障碍物干扰操作构件200并且报告干扰信息(S107)。
判定器150还基于第一驱动信息判定第一移位机构111是否具有异常(S108)。例如,当第一操作信息中用于操作第一电驱动源112的第一驱动信息超过如图4中所示的电力阈值时,具体地,当第一驱动器信息中包含的实际电流值超过电流阈值时,在步骤S106中排除干扰操作构件200的可能性。因此,判定器150判定第一移位机构111由于故障的发生而具有异常(S108:是)。第一移位机构111的故障的示例包括由于异物卡在第一移位机构111的啮合齿轮之间或者卡在螺杆轴和螺母之间而使第一移位机构111不能操作的状况。判定器150报告关于第一移位机构111的故障信息作为判定结果(S109)。
当判定器150判定第一移位机构111没有发生故障时(S108:否),判定器150报告关于第一检测器的故障信息(S110)。当指示电流值与第一驱动信息中包含的实际电流值之间的差等于或者大于第二阈值时,判定器150可以判定第一检测器发生故障。
在根据该实施方式的转向系统100中,异常判定装置151获取用于将操作构件200移位至指定位置的位置信息和驱动信息,并且判定器150进行判定。因此,可以在不使用例如仅用于辨别异常位置的检测器的情况下,辨别由输入至操作构件200的外力导致的异常、由移位机构的故障导致的异常以及由检测器的故障导致的异常。
当用于辨别故障位置的信息不足时,通过操作控制器160使除了检测到异常的操作装置之外的操作装置操作。因此,判定器150可以获取必要的信息。
本发明不限于上述实施方式。例如,本发明的实施方式可以是通过任意组合本文所描述的组成元素或者通过省略组成元素中的一些来实现的其他实施方式。本发明涵盖在不脱离本发明的精神——即权利要求的描述的含义——的情况下通过对本领域普通技术人员构思的实施方式进行各种修改而获得的修改示例。
例如,可以将转向系统100用作其中转向轮机械地连接至操作构件200的转向系统,而不是线控转向系统。例如,转向系统100可以被配置成根据驾驶员210的大小通过使用电动马达的驱动力来改变操作构件200的位置。
给出了操作构件200通过围绕沿车辆的宽度方向延伸并与移动方向相交的旋转轴旋转而被容纳的情况的描述。然而,对于容纳操作构件200的方式没有限制。例如,在没有第四操作装置140的情况下,可以将操作构件200嵌入仪表板220中,同时保持操作构件200的姿态。
如图6中所示,操作控制器160可以使第二操作装置120提前操作以辨别第一操作装置110的异常。可以由相同的附图标记来表示与图5的处理(步骤)相同的处理(步骤)以省略描述。
第一操作装置110响应于第一操作命令而开始操作(S101)。响应于第一操作装置110的操作,操作控制器160控制第二操作装置120执行预定操作(S105)。
在第一操作装置110的操作期间,判定器150通过监测从第一检测器输出的第一位置信息来判定是否发生异常(S102)。当操作构件200到达目标位置而无异常时,处理结束(S103)。
当判定器150在步骤S102中判定第一操作装置110具有异常时(S102:是),判定器150基于第二操作信息来判定第二操作装置120是否具有异常(S106)。
在第二操作装置120与第一操作装置110相关联地操作的情况下,如图7中所示,可以不执行操作控制器160的控制步骤(S105),基于例如第二操作装置120是否具有异常来辨别异常位置。
本发明适用于被配置成电动地改变操作构件的位置的转向系统。
- 转向系统、异常判定方法以及非暂态存储介质
- 检测装置的异常判定系统、检测装置、检测装置的异常判定装置、以及检测装置的异常判定方法